Zoek de juiste lijn!
Het is gemakkelijk een autorace te winnen. Je moet meestal gewoon de snelste zijn en op jouw baan blijven.
Zou het helpen als je een lijn zou kunnen volgen?
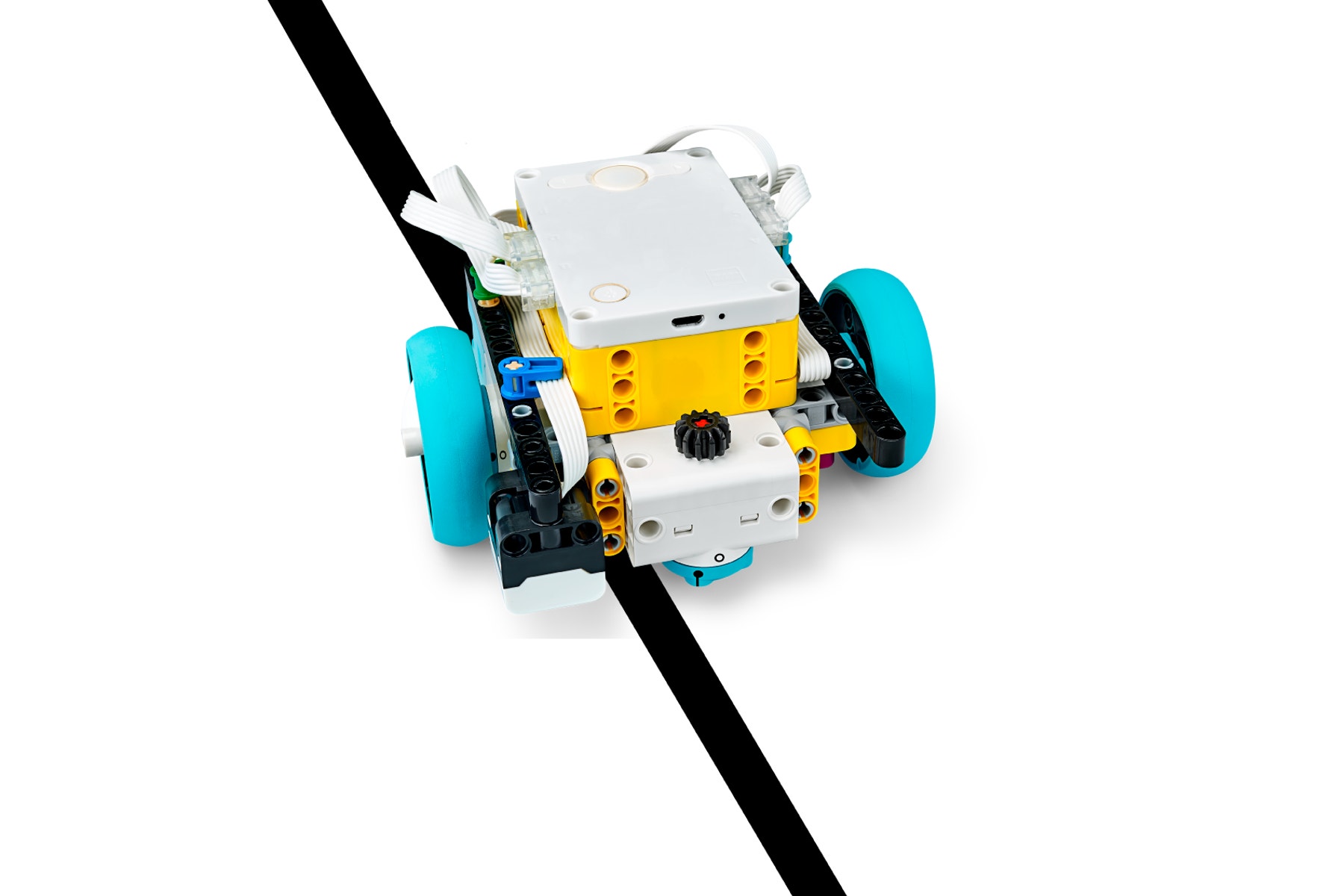
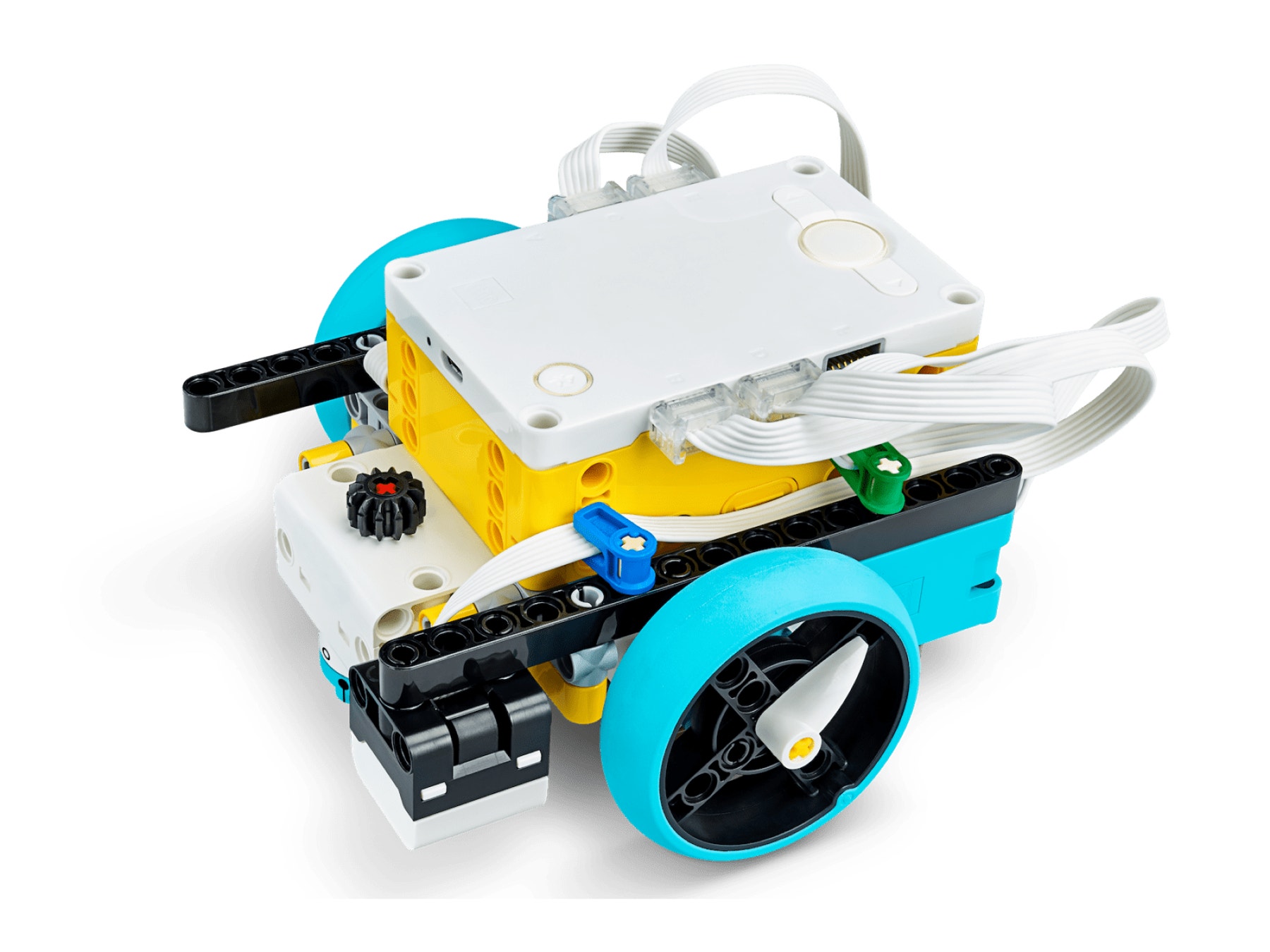
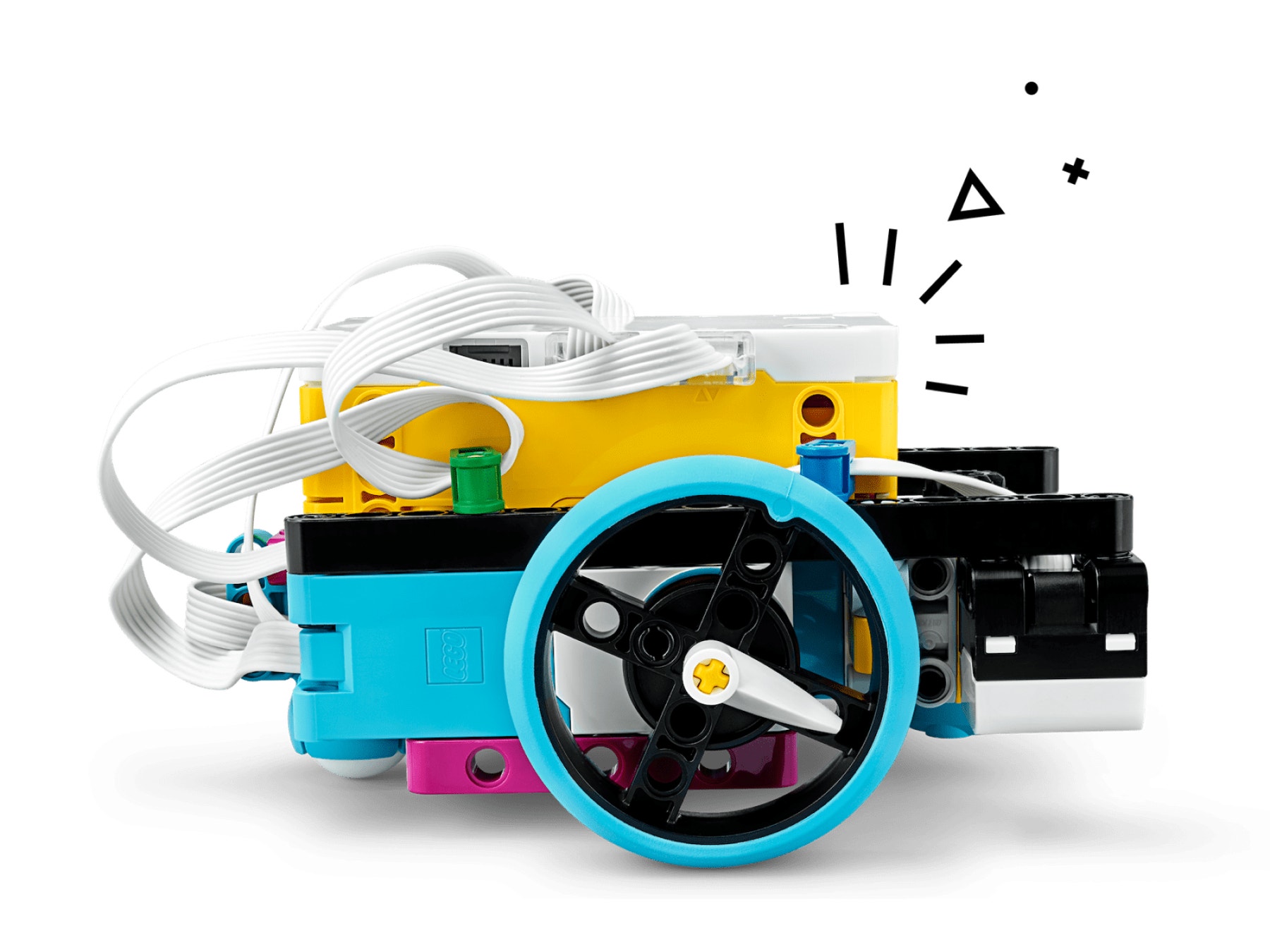
Bouw deze rijbasis met kleursensor.
Ten strijde!
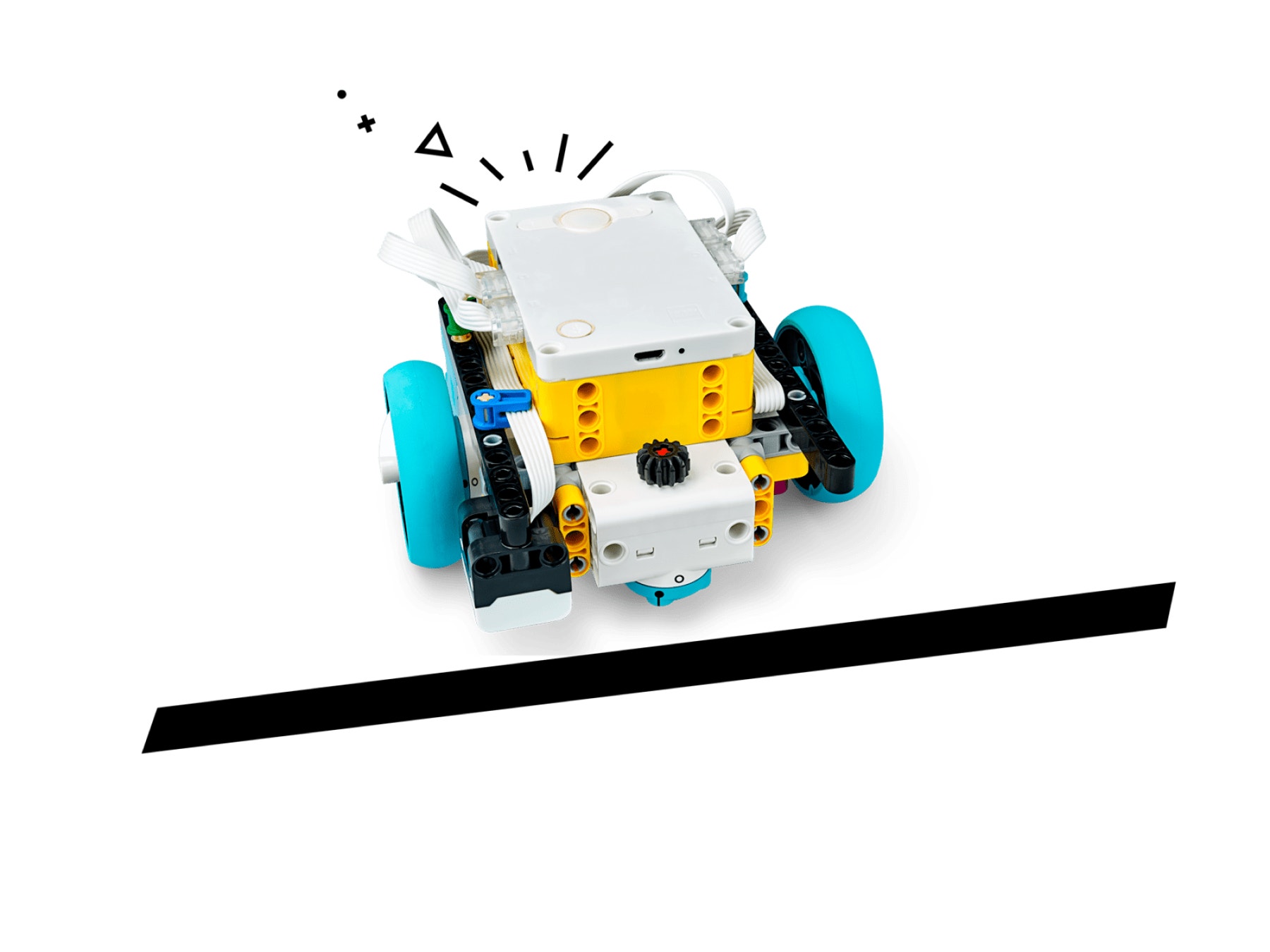
Rijden en stoppen bij een lijn.

Gebruik de eerste programmeerstack en beschrijf wat je ziet.
De eerste stack laat de rijbasis bij een lijn stoppen die loodrecht op zijn beweging staat.
De lijn kan:
- een op een vel getekende zwarte lijn zijn
- zwarte tape zijn
- bestaan uit grote zwarte LEGO stenen
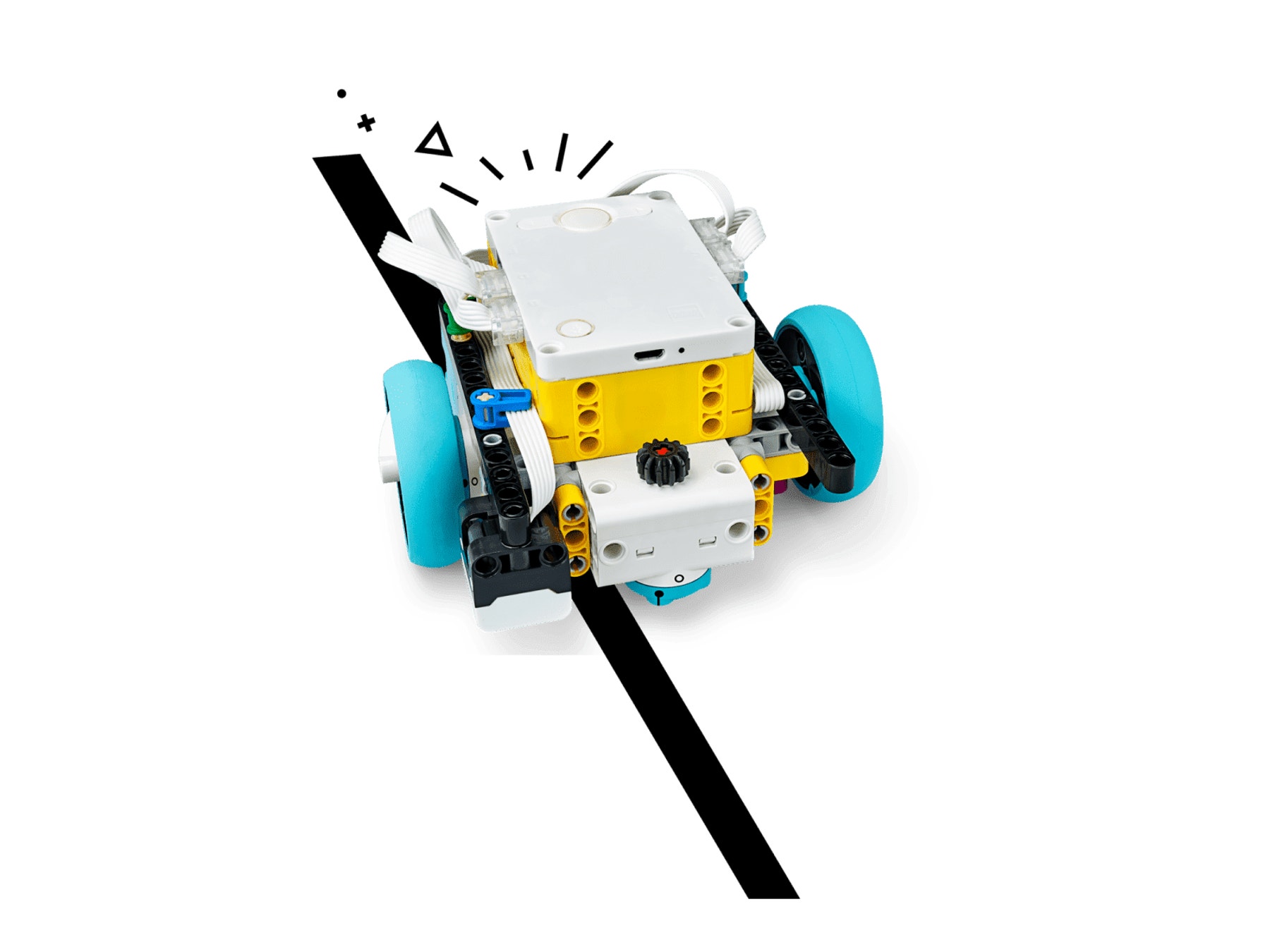
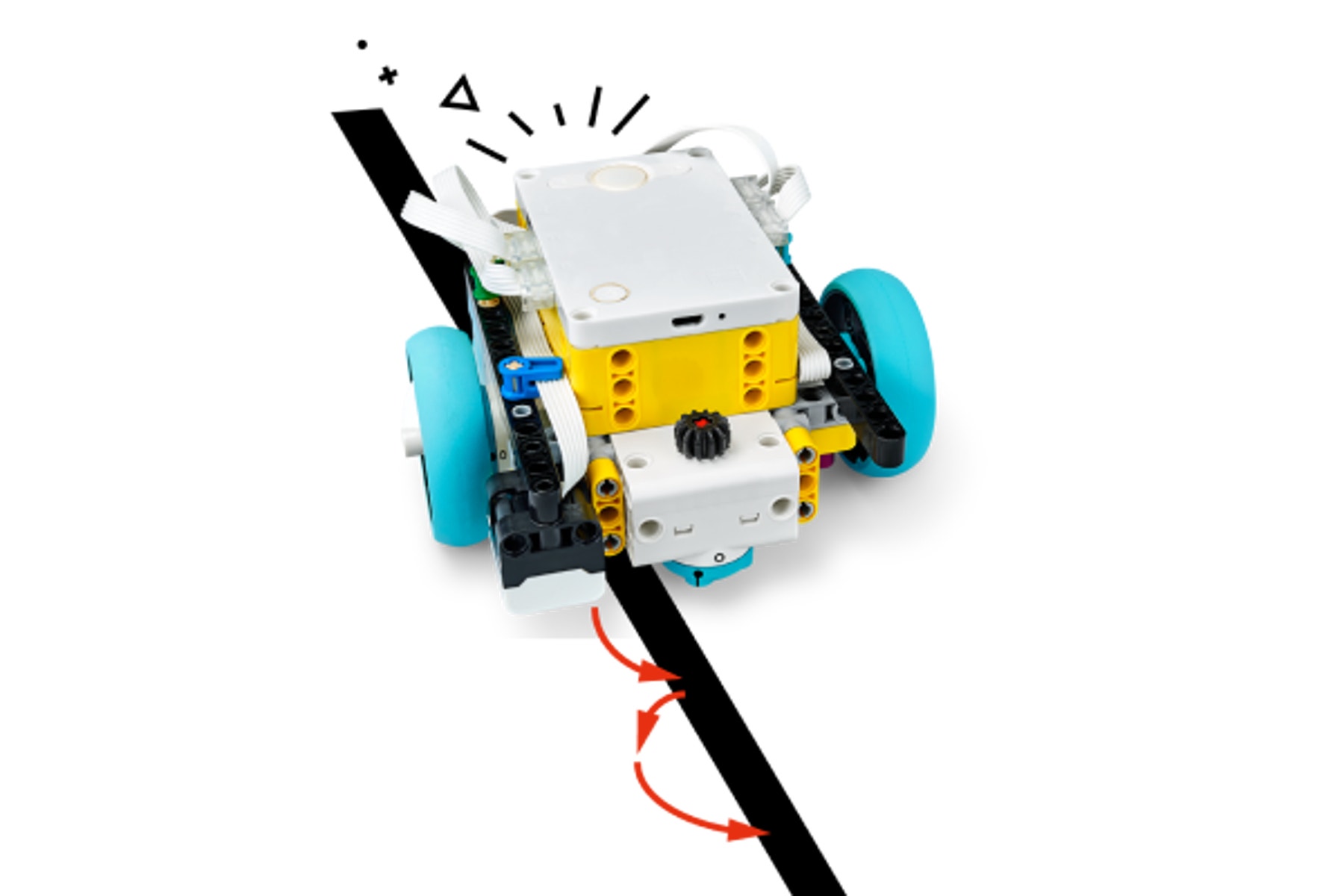
Op een lijn rijden.
Gebruik de tweede programmeerstack en beschrijf wat je ziet.
Wanneer de kleursensor de rand van de zwarte lijn detecteert, draait de rijbasis in de richting van de witte ruimte.
Wanneer de kleursensor de rand van de zwarte lijn niet detecteert, draait de rijbasis in de tegenovergestelde richting van de zwarte lijn.
Blijf deze 2 acties herhalen.
Misschien is het je opgevallen dat we de motoren rechts instellen op 50 en links op -50. Weet je waarom dat is?
Voor de beweging langs de lijn moet één motor bewegen en de andere motor stoppen om de rijbasis vooruit te laten bewegen. Als de rijbasis te scherp draait, draait deze alleen maar op zijn plek heen en weer.
Optimaliseer je programma voor snelheid.
Er zijn veel verschillende manieren om een snelle lijnvolger te maken.
Organiseer een race om te kijken wiens rijbasis het snelste is!
Voeg een ‘IF ELSE’-blok toe om de uitvoering van het programma te versnellen.
Blijf lijnvolgprogramma’s verkennen. Je zult versteld staan hoe snel ze kunnen rijden!
Jouw programma zou er zo uit kunnen zien:

Hoe heb je het gedaan?

Wat heb je goed gedaan? Is er iets wat je beter had kunnen doen?
Geweldig! Nu kun je je rijbasis bijna over het hele speelveld laten rijden.