Znajdź właściwą linię!
Łatwo wygrać wyścig samochodowy. Zazwyczaj trzeba po prostu jechać najszybciej i trzymać się toru.
Czy byłoby łatwiej, gdyby można było podążać za linią?
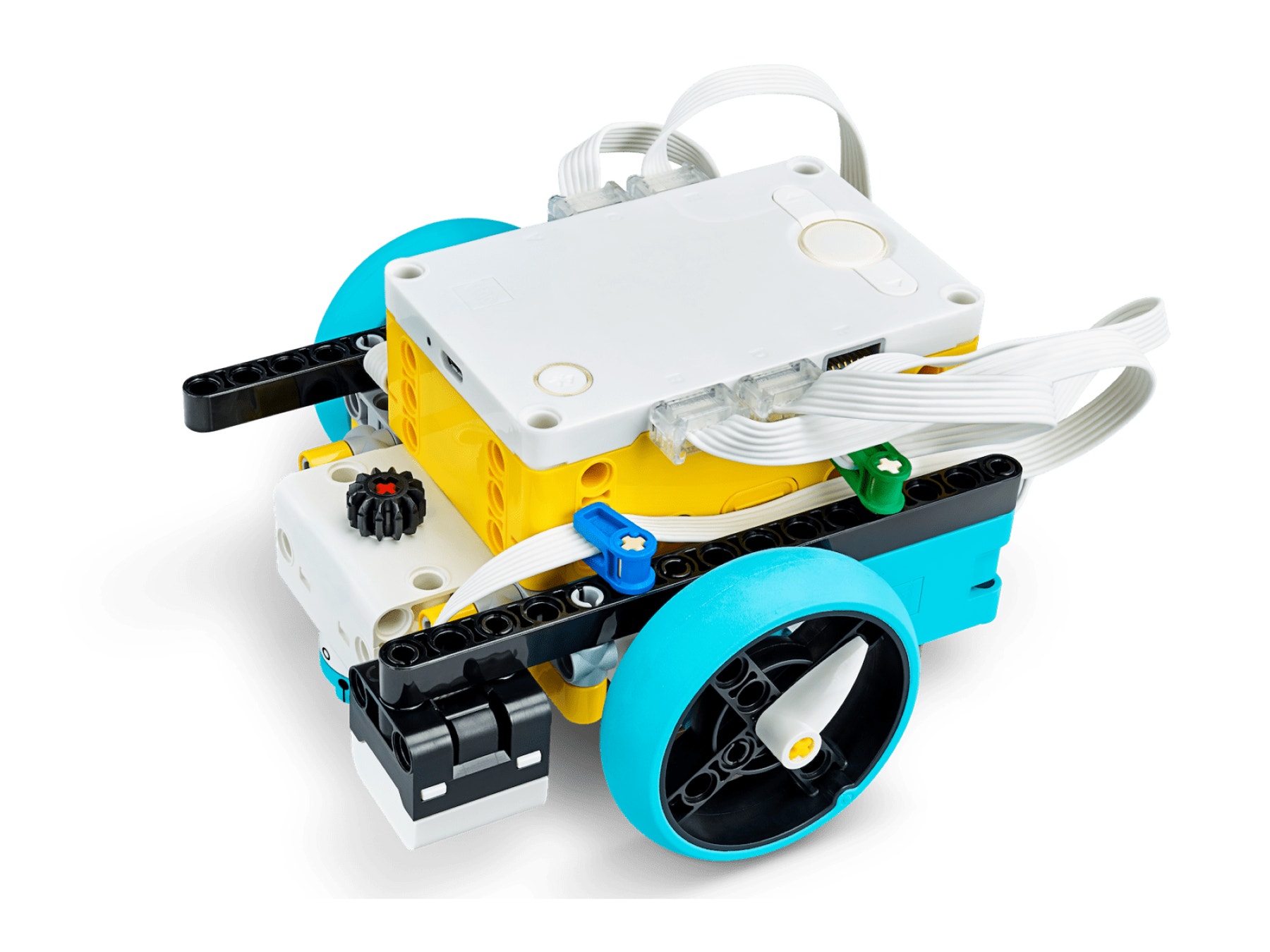
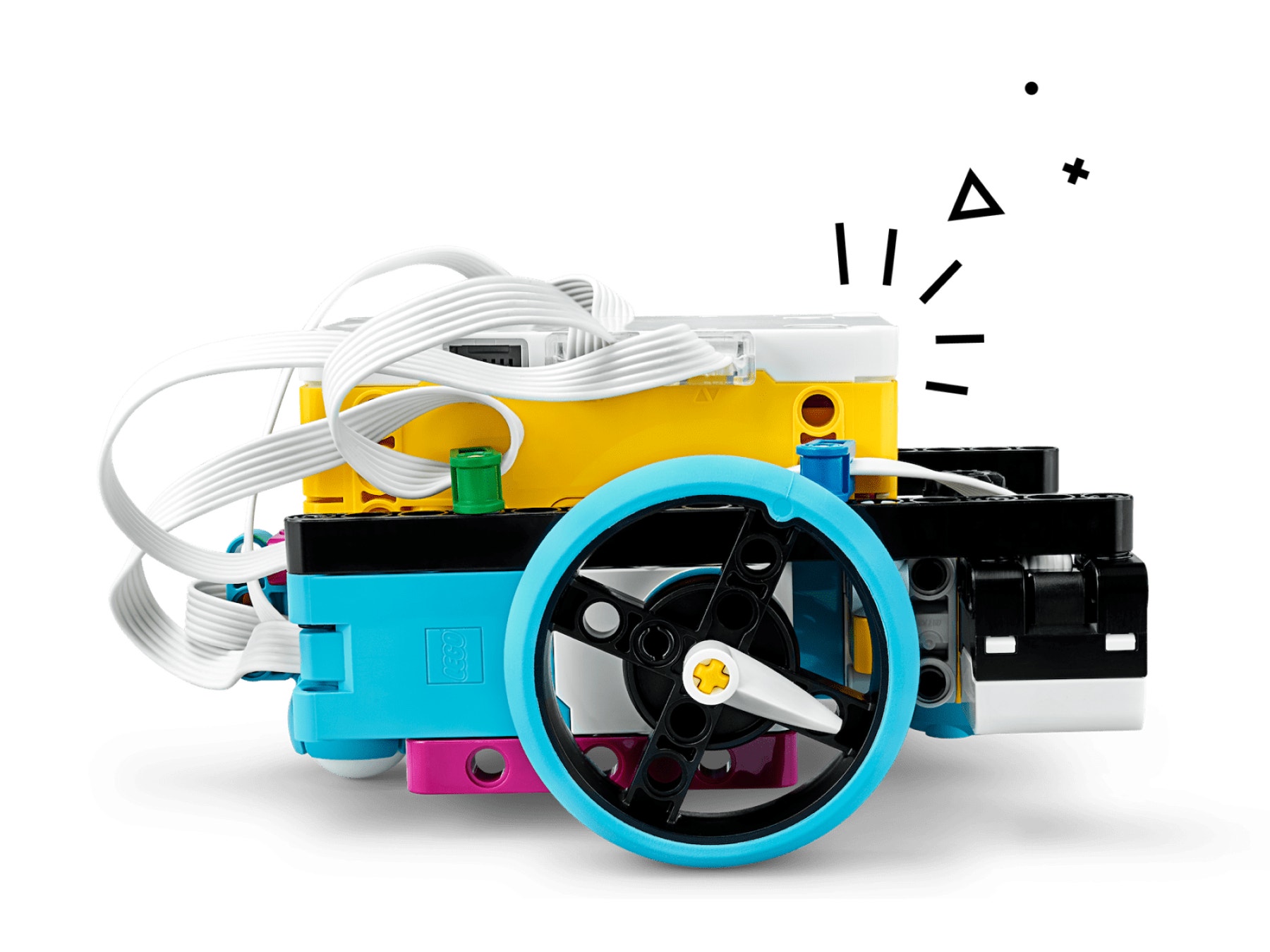
Zbuduj robota bazowego z czujnikiem kolorów
Zaczynajmy!
Jedź i zatrzymaj się przed linią.

Wypróbuj pierwszy skrypt programistyczny i opisz, co widzisz.
Ten pierwszy skrypt spowoduje, że robot bazowy zatrzyma się przed linią prostopadłą do jego ruchu.
Skąd wziąć linię:
- Czarna linia narysowana na kartce papieru
- Czarna taśma
- Większe czarne klocki LEGO
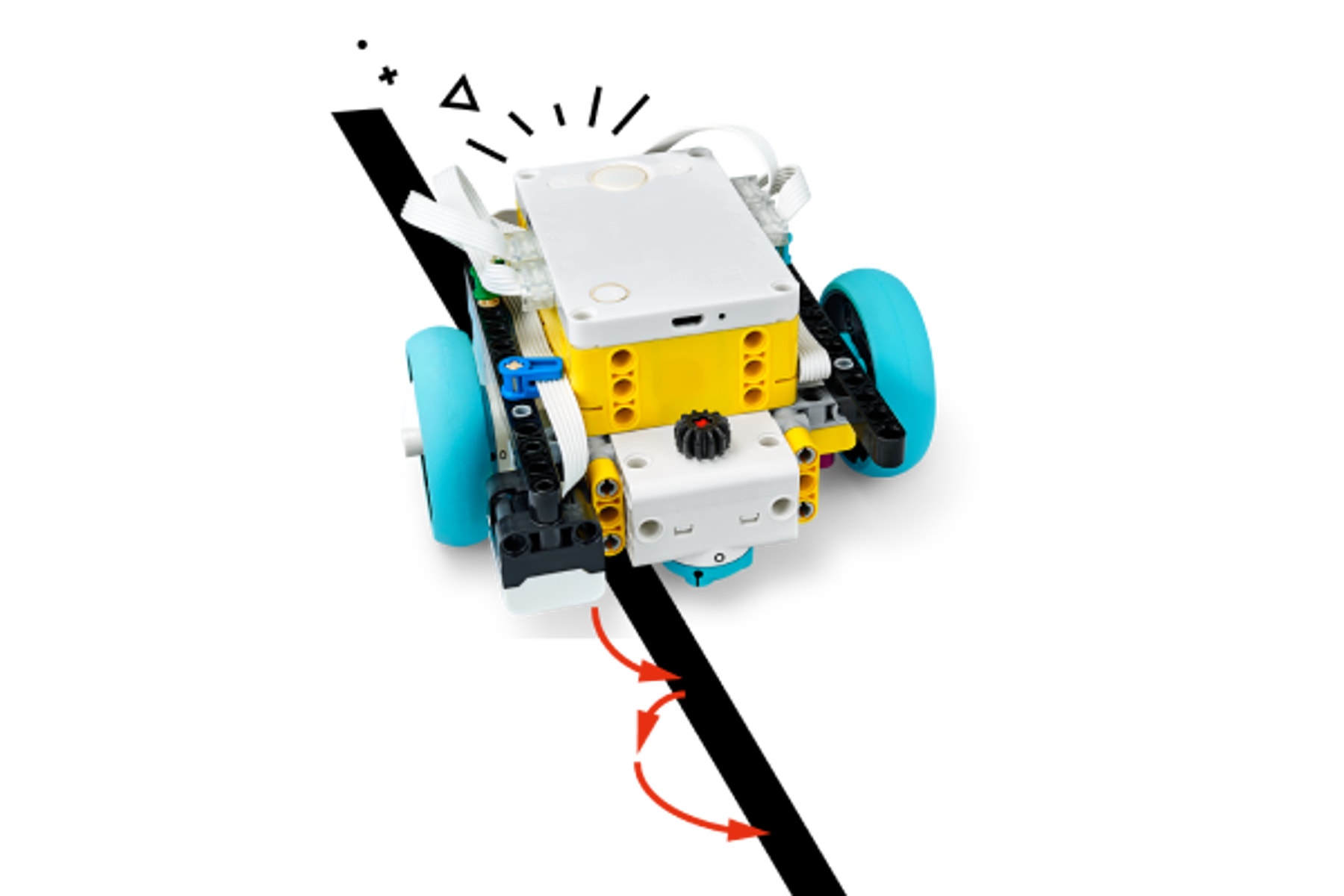
Jedź wzdłuż linii.
Wypróbuj drugi skrypt programistyczny i opisz, co widzisz.
Kiedy czujnik koloru wykrywa krawędź czarnej linii, robot bazowy skręca w kierunku białego obszaru.
Kiedy czujnik koloru nie wykrywa krawędzi czarnej linii, robot bazowy skręca w przeciwnym kierunku do czarnej linii.
Te dwa działania powtarzane są bez końca.
Może zauważyłeś(-aś), że kierujemy silnikami na prawą 50 i lewą -50. A wiesz, dlaczego?
Aby ruch odbywał się wzdłuż linii, konieczne jest, aby jeden silnik poruszał się, a drugi silnik był zatrzymany, tak aby umożliwić ruch robota bazowego do przodu. Jeśli robot bazowy obróci się zbyt ostro, po prostu będzie ciągle obracał się w miejscu.
Zoptymalizuj swój program pod kątem prędkości.
Istnieje wiele sposobów, aby szybko podążać za linią.
Zorganizuj wyścig, aby zobaczyć, czyj robot bazowy jest najszybszy.
Dodaj blok „Jeśli, w przeciwnym razie”, aby przyspieszyć wykonywanie programu.
Testuj różne programy podążania za linią i odkryj, jak bardzo możesz zwiększyć prędkość!
Twój program może wyglądać mniej więcej tak:

Jak Ci poszło?

Co poszło dobrze? Czy jest coś, co mogło pójść lepiej?
Niesamowite! Teraz możesz dojechać swoim robotem bazowym prawie w każde miejsce na polu gry.