Tentativa e erro
O que é bom o suficiente?
Nenhuma máquina é perfeita. Os engenheiros fazem de tudo para que elas sejam o mais precisas e exatas possível, mas sempre haverá algum grau de erro.
Quais fatores determinam a quantidade de erro que é aceitável?
Construa esse *Bevel Bot*.
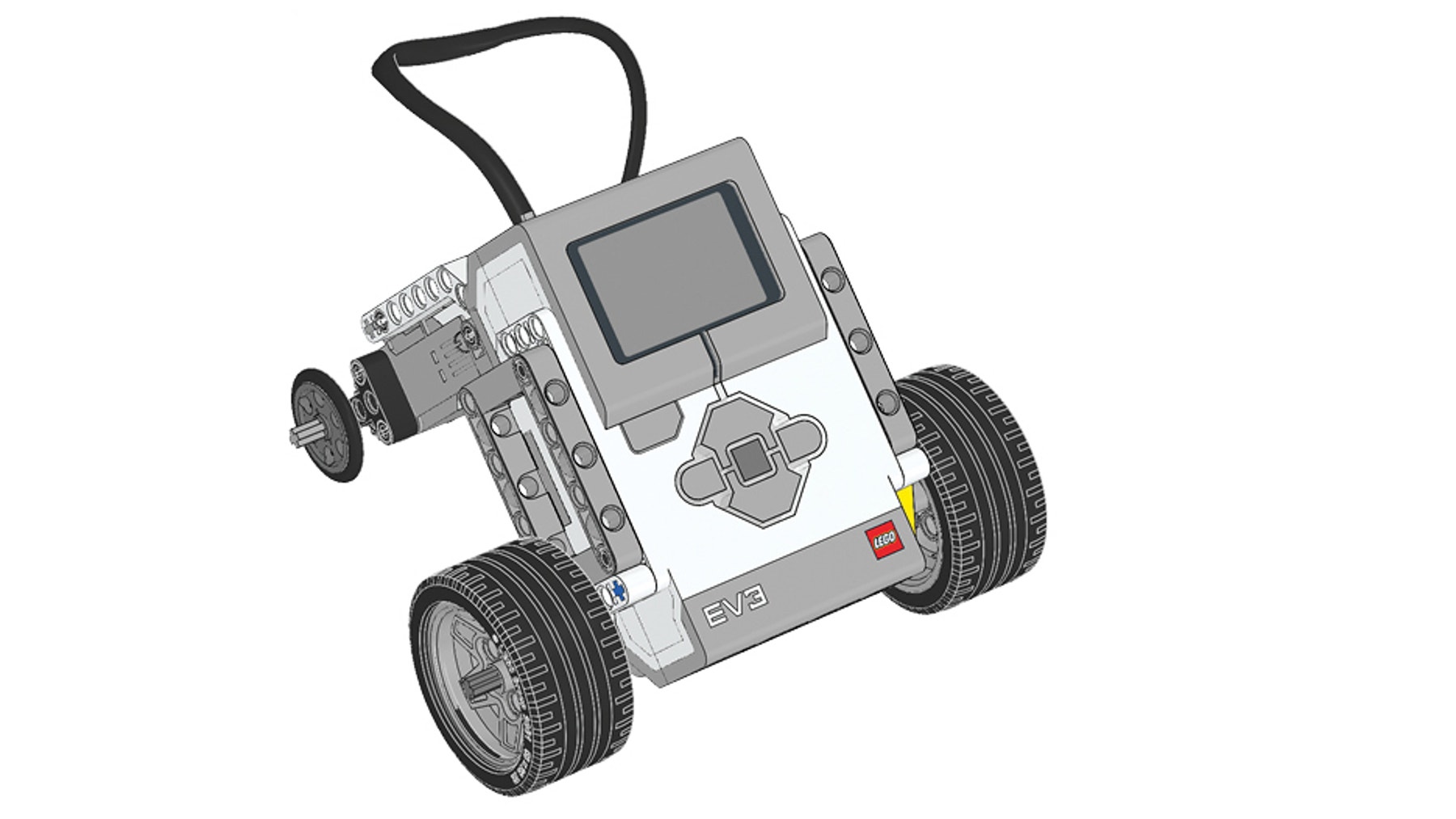
Ele vai ajudar você a investigar quais aspectos de seu projeto e programa podem causar imprecisões.
Faça um teste de execução.


Posicione o modelo em uma superfície sólida e nivelada e marque sua posição inicial. Execute o programa e marque a posição final assim que ele pare de se mover.
Faça o Bevel Bot se mover 100 cm? As rotações calculadas do motor, as rotações reais do motor e a distância calculada de deslocamento (em cm) estão na tela?
Registre seus resultados.
Registre o número do experimento, a distância de deslocamento calculada e a distância de deslocamento medida em uma tabela de teste. Certifique-se de deixar espaço para colunas adicionais para outros cálculos.
Realize o experimento usando o modelo e o programa padrão. Repita o experimento para cada ajuste que você faça para determinar seus efeitos.
Realizando o experimento
Tenha em mente as seguintes dicas enquanto você realizar seu experimento:
- As rotações calculadas do motor, as rotações reais do motor e a distância de deslocamento calculada (em cm) serão mostradas na tela.
- Realize o experimento pelo menos três vezes e use os valores médios para garantir resultados confiáveis.
Resuma seus resultados.

Use a distância média de deslocamento medida para cada um dos ajustes que você fez e calcule o erro para identificar qual versão foi a mais precisa.
Quais ajustes ao projeto do robô e ao programa tiveram o maior impacto na sua precisão?
Como você se saiu?

O que você fez bem? Tem alguma coisa que você poderia ter feito melhor?
Incrível! Agora você sabe como melhorar a precisão de um robô. Vamos para a próxima aula.