Agarrar e liberar
Precisamos de algumas ferramentas motorizadas.

Ferramentas motorizadas podem ser conectadas a robôs para permitir que eles executem tarefas diferentes. Agora é hora de encontrar a ferramenta certa para o trabalho!
Quais ferramentas motorizadas a sua Base Motriz precisaria para mover objetos?
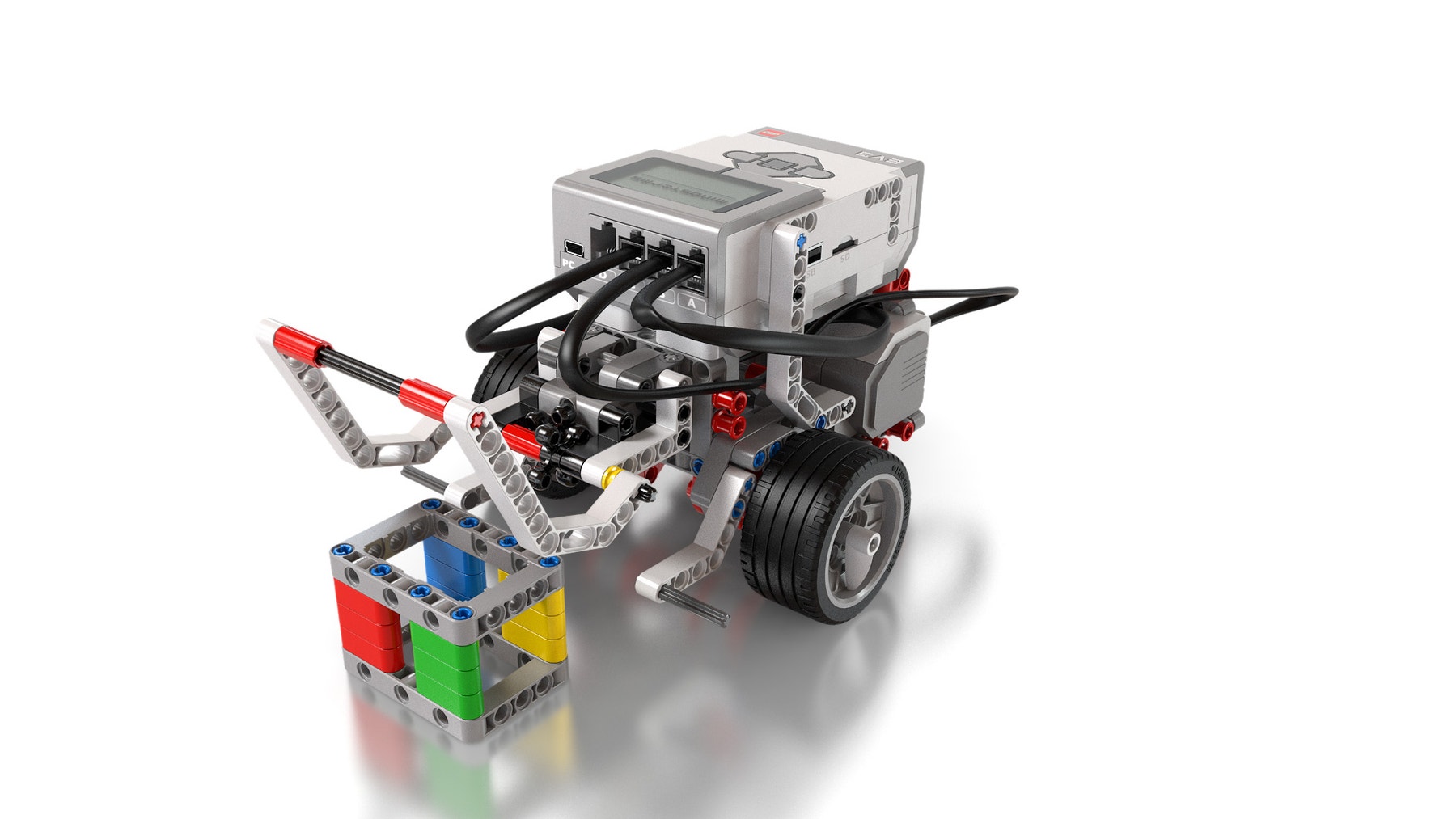
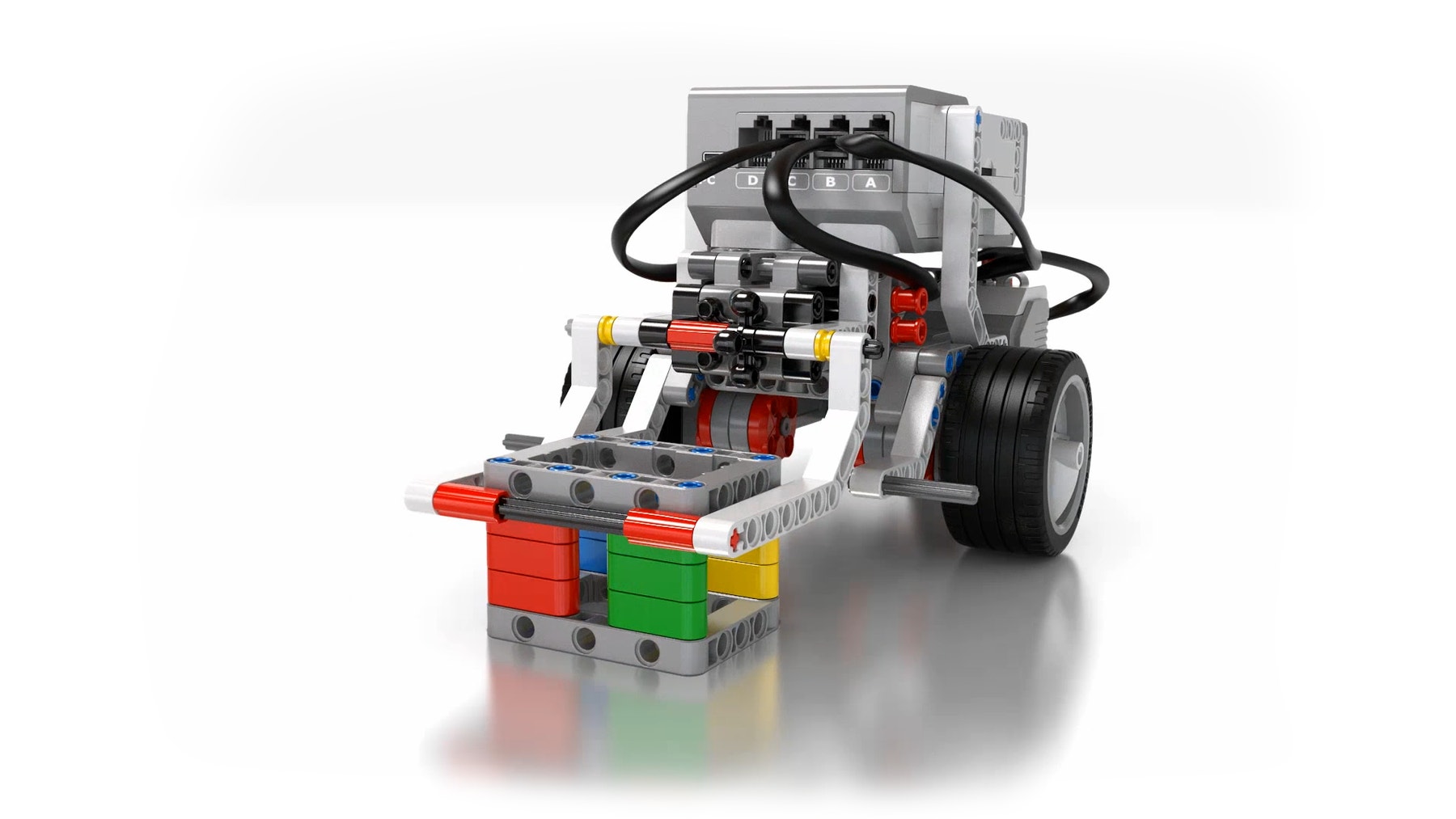
Construa o Cuboide e essas extensões.

Usaremos a extensão de motor médio para pegar e liberar o Cuboide. Você também precisará da extensão do Sensor Ultrassônico da última aula. Construa o Cuboide e, então, construa a extensão na Base Motriz.
Experimente estas programações uma após a outra.

O que você vê aqui? Tente posicionar o Cuboide em posições diferentes.
Quais os recursos e as limitações principais da extensão de motor médio?
Sua vez!
Use blocos das pilhas de programação que já estão na tela de programação para criar um programa que pega o Cuboide, move-se para frente por algumas rotações, libera o Cuboide e, finalmente, reverte para voltar à posição inicial.
É hora de um desafio!

Programe a Base Motriz para usar o Sensor Ultrassônico para parar próximo do Cuboide, então, abaixe o braço para coletar e retornar o Cuboide à sua posição inicial.
Como você se saiu?
O que você fez bem? Tem alguma coisa que você poderia ter feito melhor?
Você consegue! Você pode pegar e liberar objetos, e movê-lo para qualquer lugar que queria.