Trial and error
Vad är tillräckligt bra?
Ingen maskin är perfekt. Även om ingenjörerna gör sitt bästa för att få dem så noggranna och exakta som möjligt, kommer det att förekomma vissa fel ändå.
Vilka faktorer påverkar hur stort fel som kan godtas?
Bygg den här *Bevel Bot*-modellen.
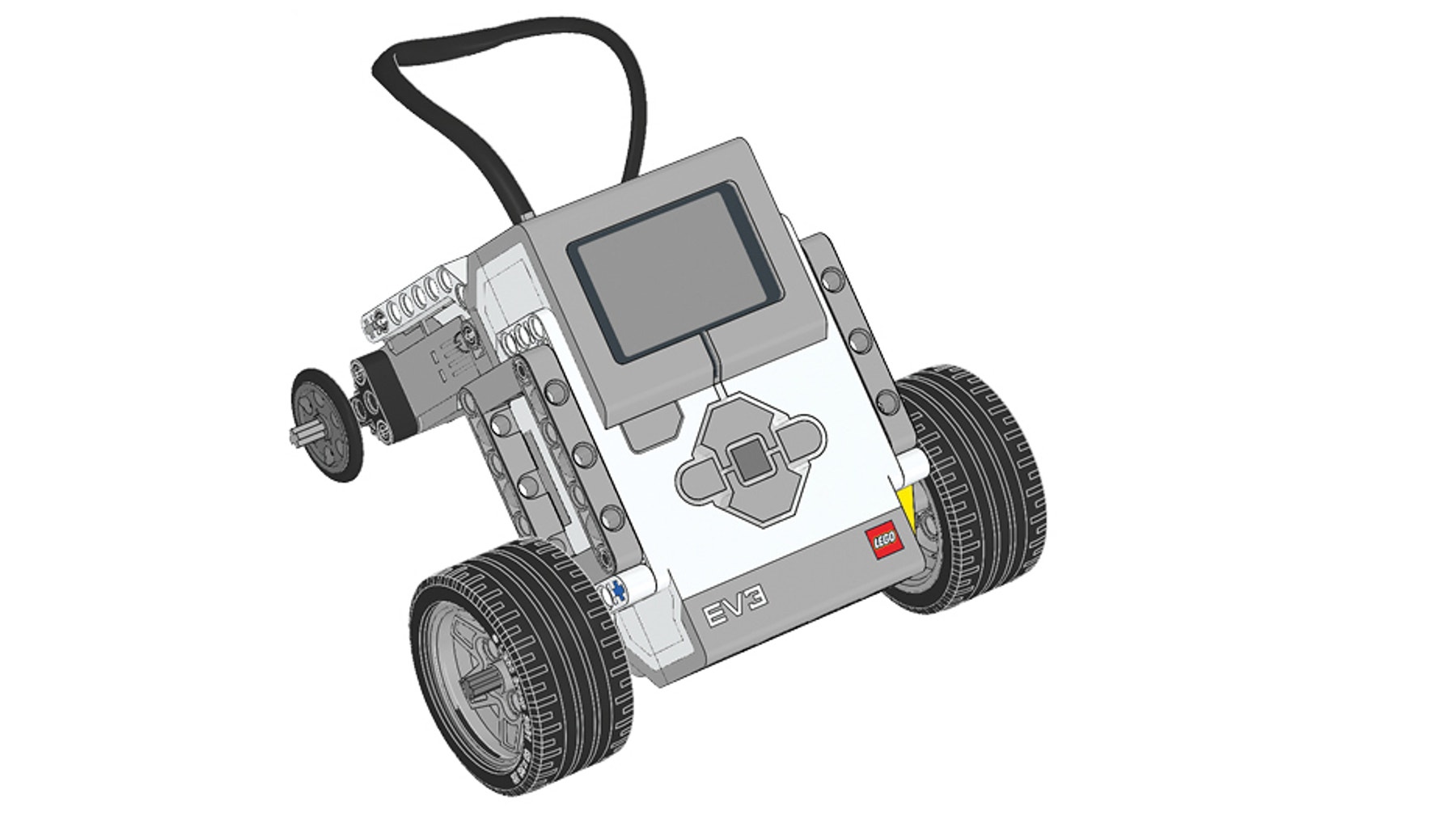
Sedan kan du använda den för att undersöka vilka konstruktions- och programegenskaper som kan orsaka precisionsfel.
Gör en provkörning.


Placera modellen på en stabil och plan yta, och markera startpositionen. Kör programmet och markera slutpositionen när modellen har slutat förflytta sig.
Förflyttar sig Bevel Bot 100 cm? Visas beräknade motorrotationer, faktiska motorrotationer och beräknad körsträcka (i cm)?
Registrera resultatet.

Registrera numret på experimentet, beräknad körsträcka och uppmätt körsträcka i en testtabell. Se till att lämna plats för fler kolumner och ytterligare beräkningar.
Utför experimentet genom att använda standardmodellen och standardprogrammet. Upprepa experimentet för varje justering som görs, så att du kan bestämma hur justeringen påverkar resultatet.
Utföra experimentet
Kom ihåg följande tips medan du utför experimentet:
- Beräknade motorrotationer, faktiska motorrotationer och beräknad körsträcka (i cm) visas på displayen.
- Utför experimentet minst tre gånger och använd genomsnittsvärdena för att få ett så tillförlitligt resultat som möjligt.
Sammanfatta resultatet.
Använd den genomsnittliga uppmätta körsträckan för varje justering som görs, och beräkna felet för att ta reda på vilken version som hade bäst precision.
Vilka konstruktions- och programjusteringar hade störst inverkan på robotens noggrannhet?
Hur gick det?
Vad gick bra? Finns det något som kunde ha gått ännu bättre?
Bra jobbat! Nu vet du har man förbättrar en robots precision. Vi fortsätter med nästa lektion.