Föremål och hinder
Körningsbasen är en robotplattform byggd på moduler.
Den kan byggas ut och konfigureras om efter behov. Genom att lägga till sensorer kan man få den att reagera på saker i omgivningen. Till exempel kan man få den att upptäcka hinder och undvika att kollidera med dem.
Känner du till någon robot som kan upptäcka föremål?
Bygg kuben och den här utökningen.
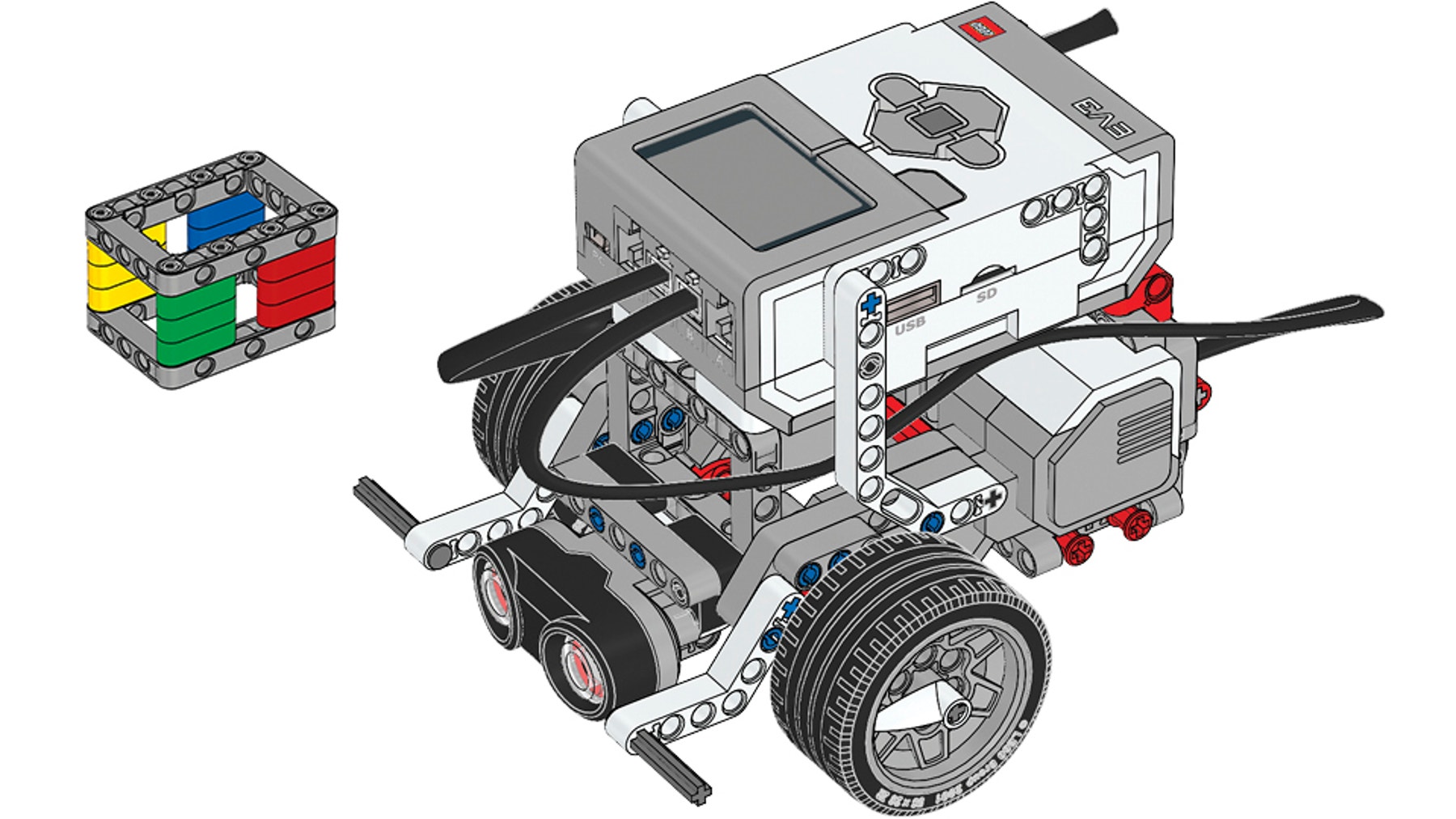
Ultraljudssensorn behövs för att kunna upptäcka föremål och hinder. Bygg kuben, och bygg sedan den nya delen på körningsbasen.
Testa att placera de här programmeringsstaplarna efter varandra.

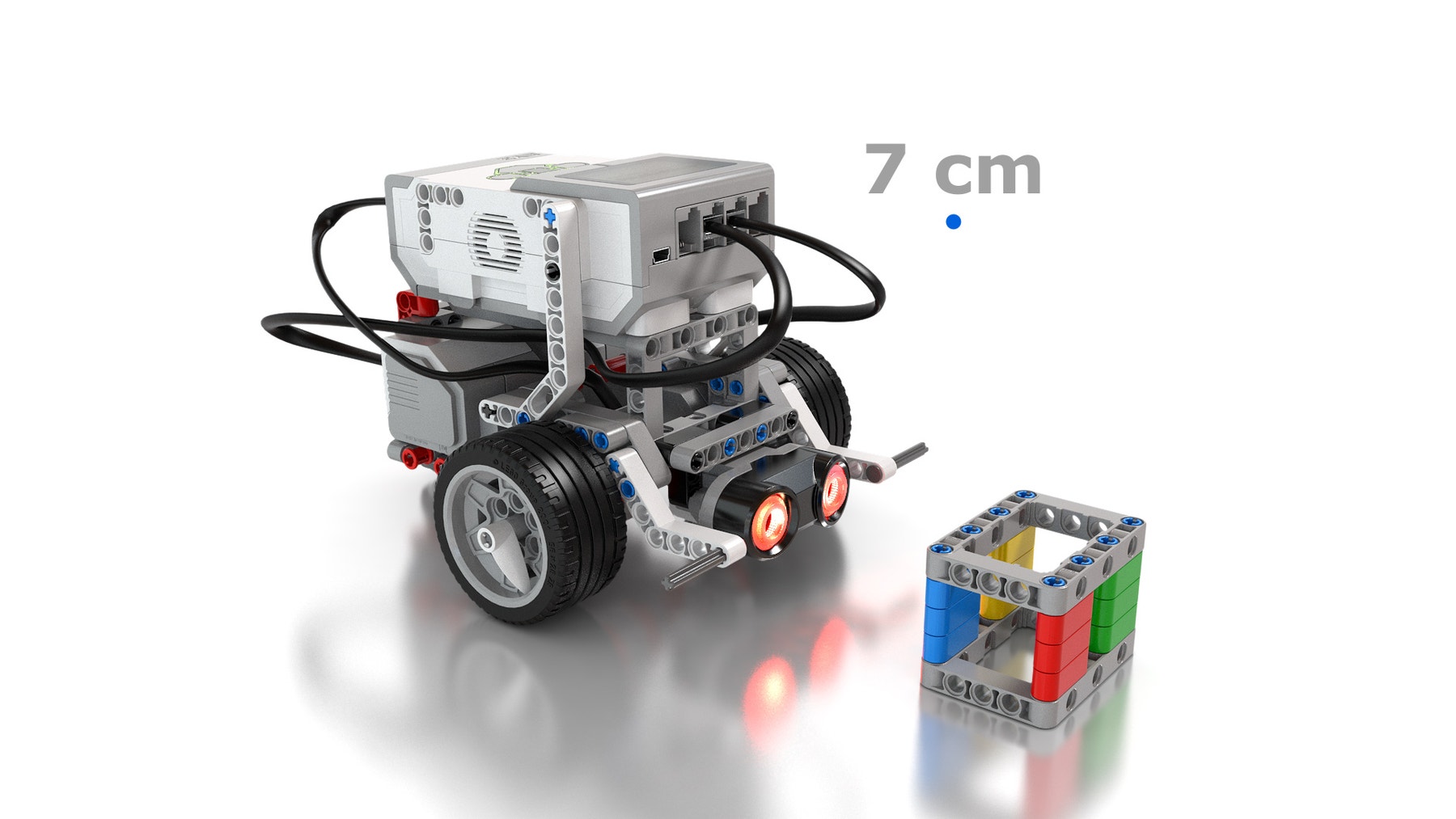
Vad ser du? Prova att placera kuben i olika positioner.
I vilka situationer kan du använda ultraljudssensorn för att mäta avstånd?
Din tur!

Använd blocken från de programmeringsstaplar som redan finns på programmeringsytan, för att skapa ett program som reagerar på två olika avstånd till kuben.
Dags för en utmaning!
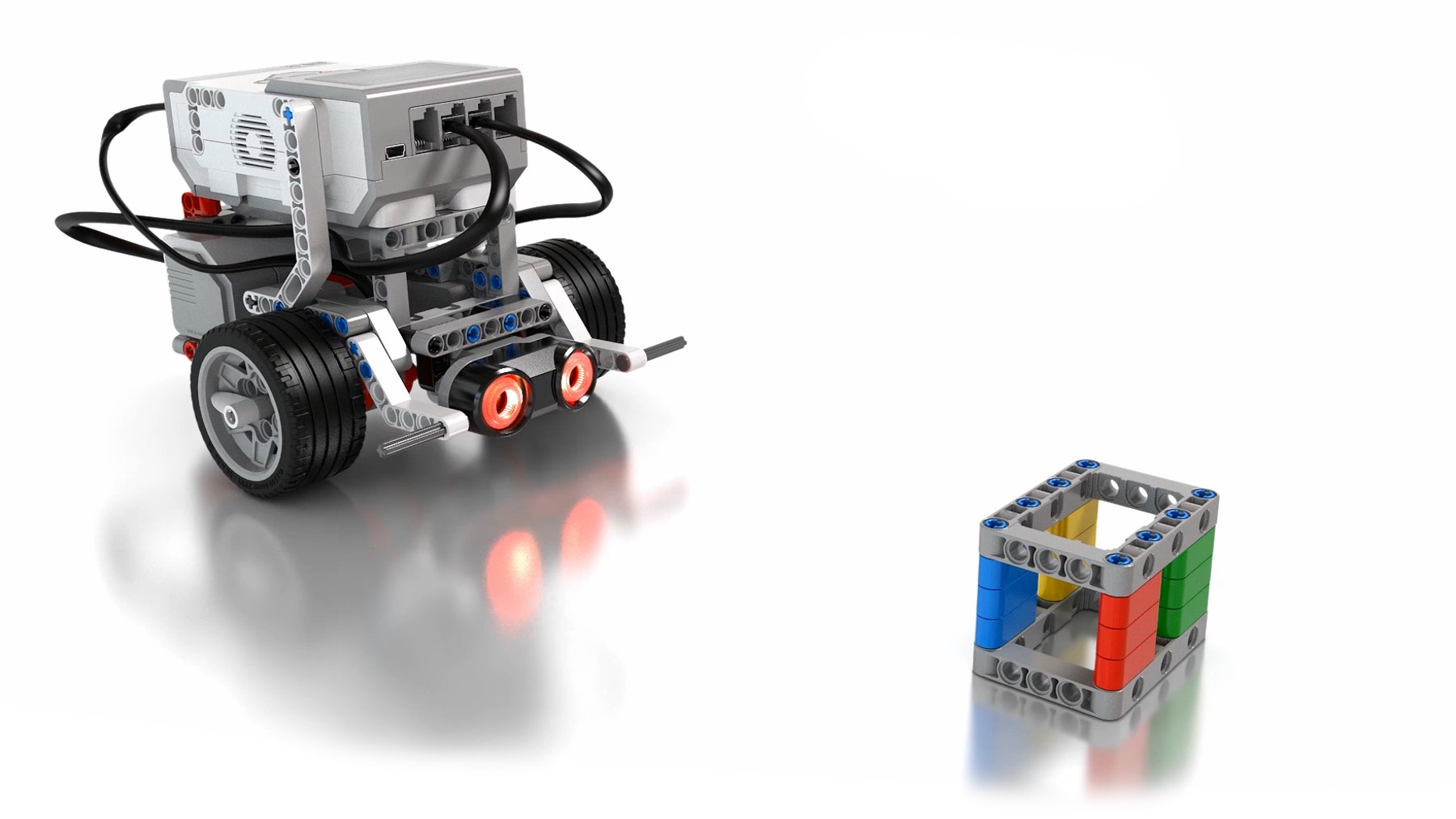
Programmera att körningsbasen ska pipa snabbare ju närmare kuben den kommer.
Hur gick det?

Vad gick bra? Finns det något som kunde ha gått ännu bättre?
Säkerheten först! Nu kan du upptäcka och reagera på hinder som är i vägen.