Greppa och släpp
Vi behöver ett antal motoriserade verktyg.
Motoriserade verktyg kan monteras på robotar för att få dem att utföra vissa uppgifter. Nu är det dags att hitta rätt verktyg för uppgiften!
Vilka motoriserade verktyg behöver körningsbasen för att kunna flytta runt föremål?
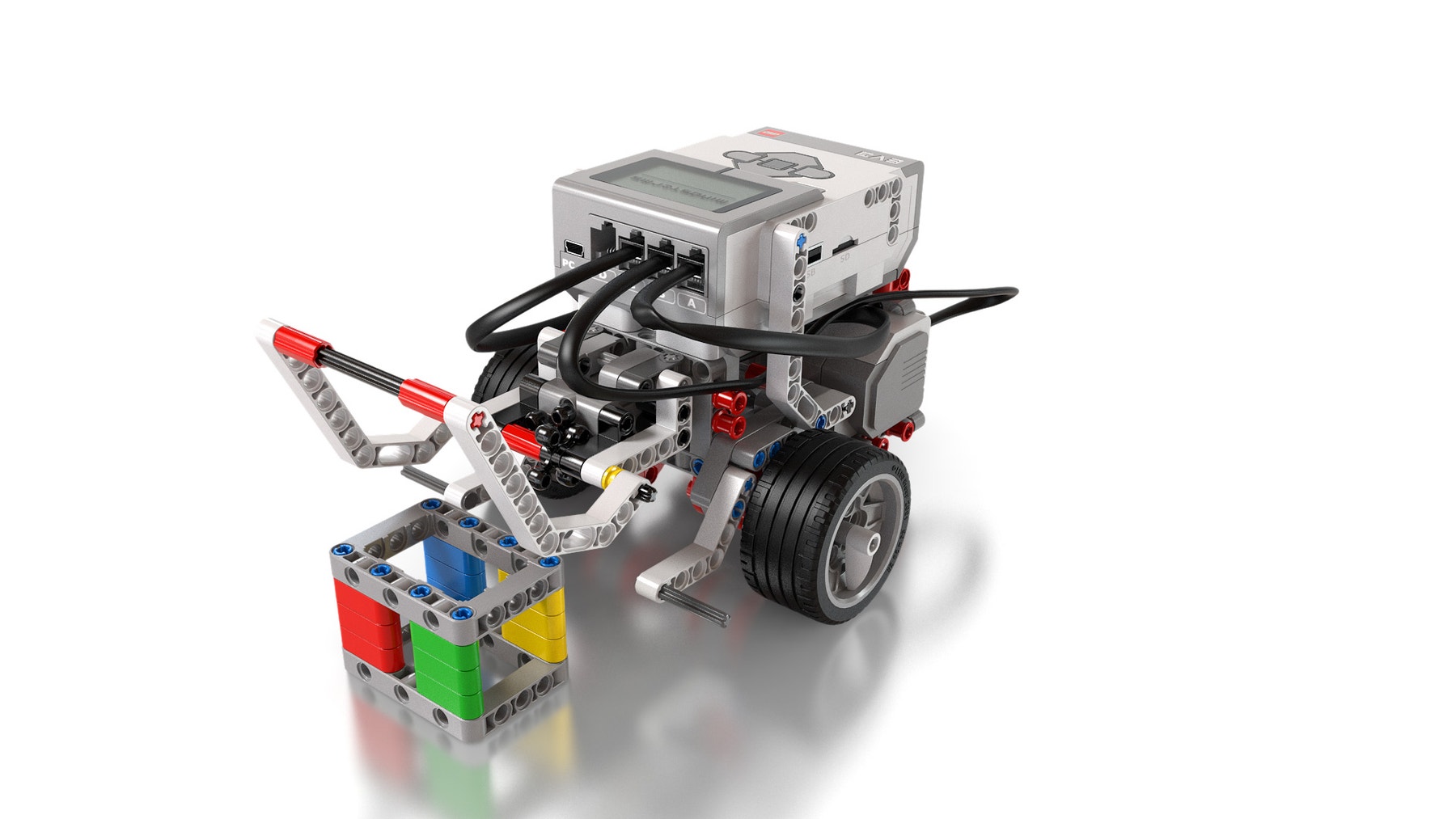
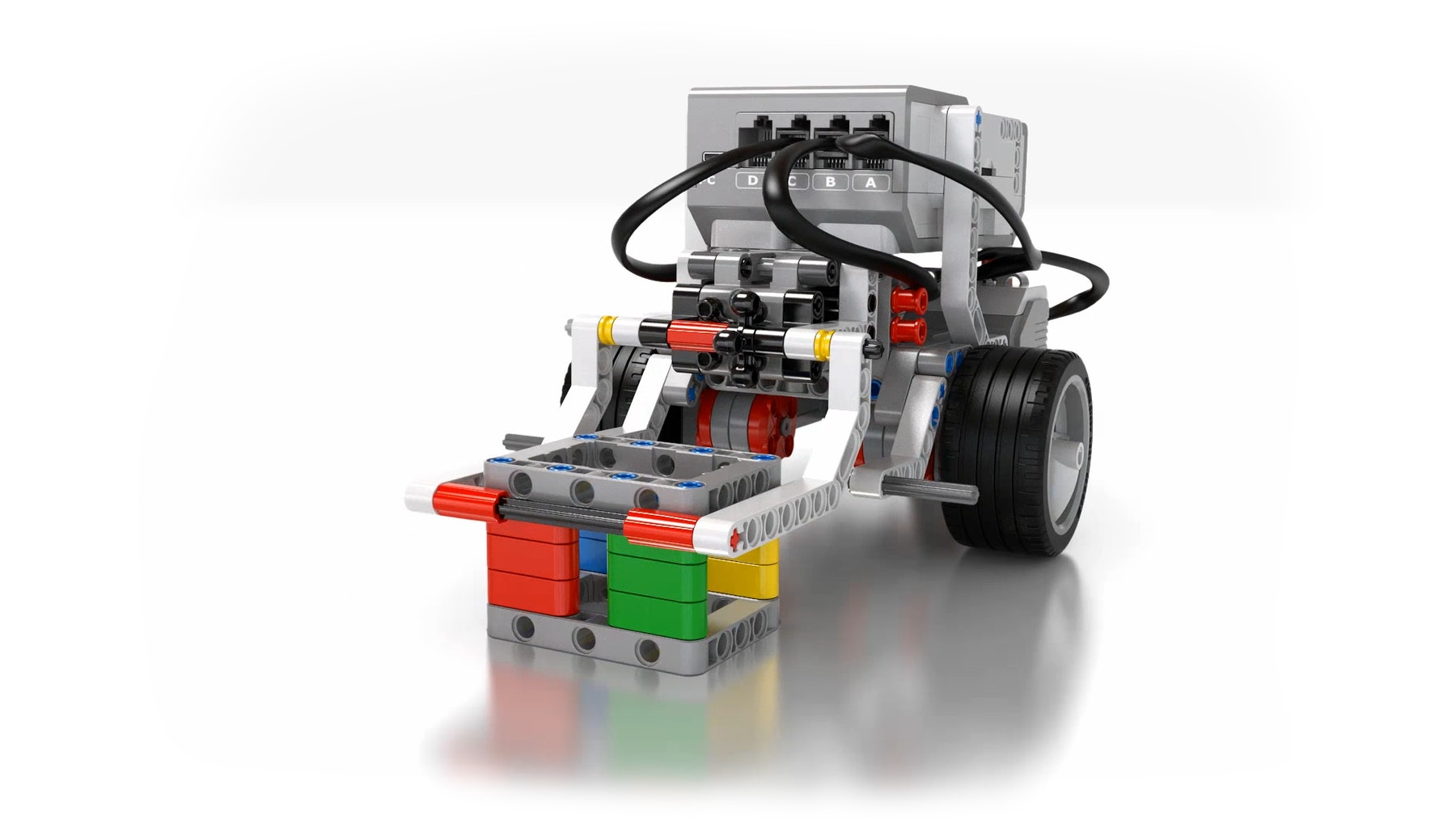
Bygg kuben och de här utökningarna.
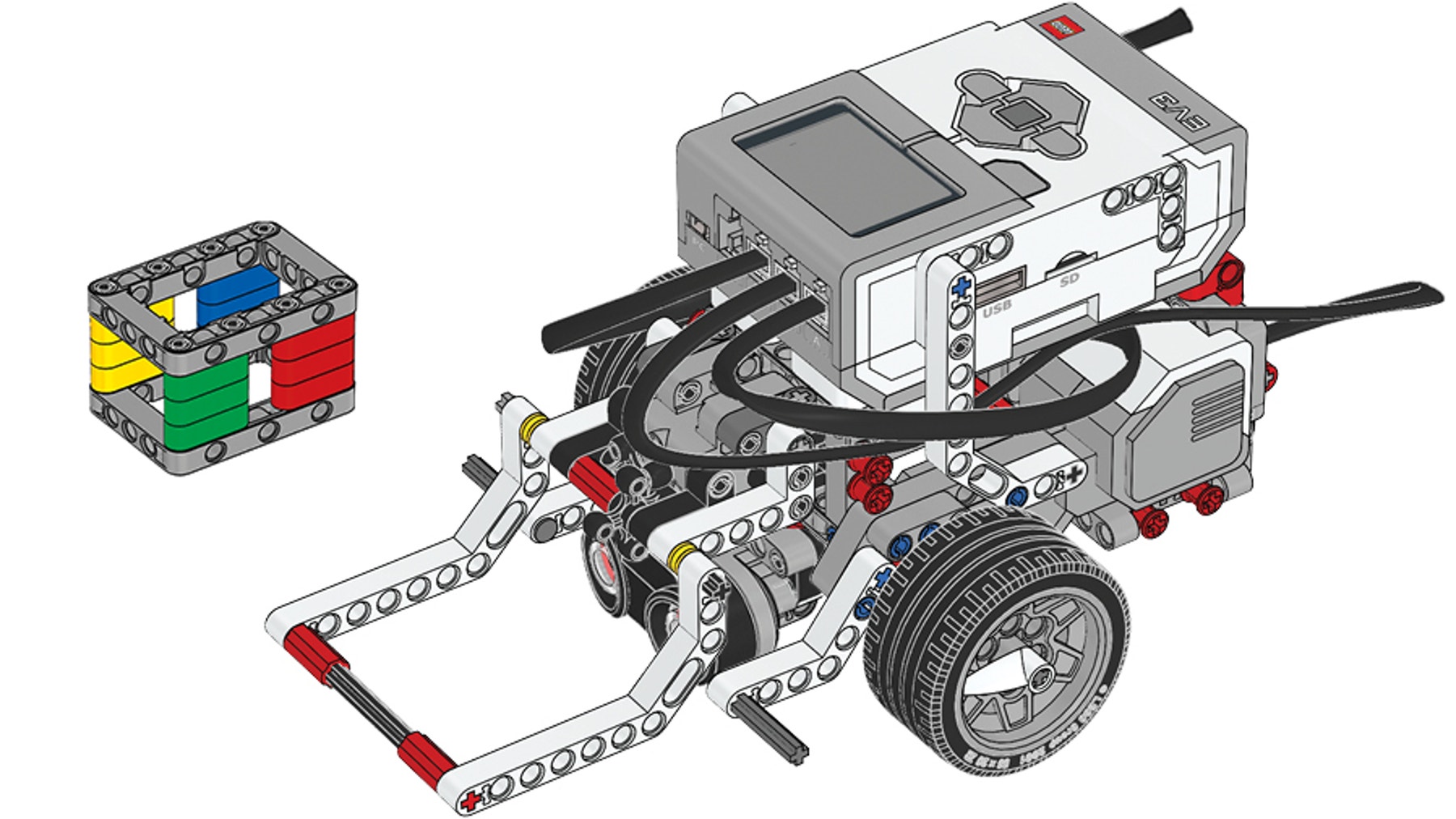
Du ska använda den medelstora motorn för att plocka upp och släppa kuben. Dessutom behövs Ultraljudssensor från den förra lektionen. Bygg kuben, och bygg sedan utökningarna på körningsbasen.
Testa att placera de här programmeringsstaplarna efter varandra.

Vad ser du? Prova att placera kuben i olika positioner.
Vilka huvudfunktioner och begränsningar har delen Medelstor motor?
Din tur!
Använd blocken från de programmeringsstaplar som redan finns på programmeringsytan, för att skapa ett program som plockar upp kuben, kör framåt ett antal hjulrotationer, släpper kuben och sedan vänder sig om och kör tillbaka till startpositionen.
Dags för en utmaning!

Programmera körningsbasen att använda ultraljudssensorn för att stanna nära kuben, sänka armen och plocka upp kuben för att slutligen köra den tillbaka till startpositionen.
Hur gick det?
Vad gick bra? Finns det något som kunde ha gått ännu bättre?
Det här går bra! Du kan plocka upp och släppa föremål, och flytta dem till önskad plats.