Svänga med hjälp av sensor
Ditt uppdrag är att programmera roboten så att den kan vrida sig till en exakt vinkel med hjälp av en gyrosensor.
Steg för steg
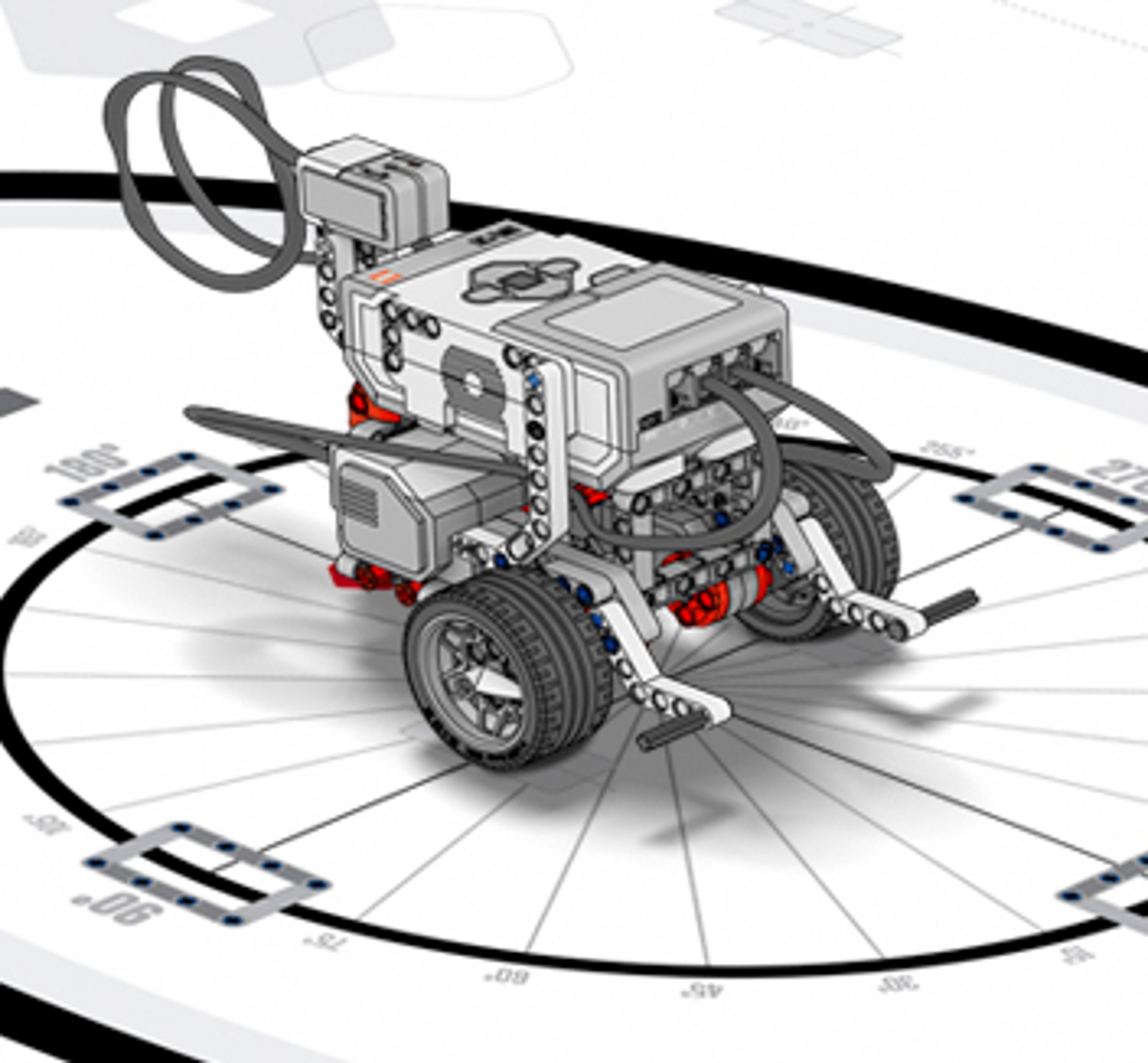
- Bygg roboten.
- Skapa ett program.
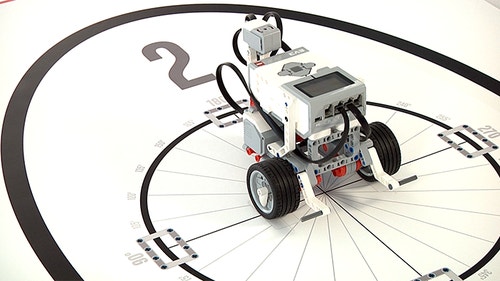
- Placera roboten i position 2 på matta 2 och kör programmet.
- Dokumentera dina observationer.
- Lär dig mer om att använda gyrosensorn för att styra roboten.
Innan du börjar med uppdraget kanske du vill repetera följande Robot Educator-handledningar:
- Stoppa vid lutning
- Loop
I det här uppdraget utforskar eleverna sambandet mellan robotens beteende och indata från sensorer. Körningsbasens rotationer kontrolleras med hjälp av gyrosensorn.
Observera eleverna och kontrollera att de
• använder rätt terminologi
• känner till/kan använda funktionen för att programmera block
• hittar bra sätt att kontrollera robotens vridningsvinkel
• förstår vilka faktorer som kan inverka på stopprecisionen när en gyrosensor används (sensorns tolerans, motorfördröjning och rotationskraft).
Anknyta
(5 min.)
Med endast hjul är det svårt att göra exakta svängar. Försöker du få roboten att svänga eller vrida sig på ett halt underlag, kanske vridningsvinkeln inte blir rätt. Med gyrosensorn kan du göra robotens svängar mycket mer exakta.
Ditt uppdrag är att programmera roboten så att den kan vrida sig till en exakt vinkel med hjälp av en gyrosensor.
Skapa
(20 min.)
Bygga roboten
Klicka på länkarna nedan för att öppna bygginstruktionerna. Bygg sedan modellen och gå tillbaka till detta projekt för att fortsätta. Hoppa över detta steg om modellen redan är byggd.
VIKTIGT
Håll gyrosensorn och EV3-enheten stilla när du ansluter kabeln och startar EV3-enheten.
Skapa ett program
Skapa det program som visas och ladda ner det till roboten.

Programsammanfattning
Starta
Kör – spakstyrning - Styrka B[10], Styrka C[-10]
Vänta - Gyrosensor - Jämför vinkel - Typ [3] (större än eller lika med), Grader [90]
Kör – spakstyrning - Av
Felsökning
Vinkeln måste justeras – vanligtvis måste ett lägre värde än 90 grader användas.
Teori
Det rotations-/vridningsvärde som anges i sensorblocket när gyrosensorn används, motsvarar körningsblockets rotationer. Sensorns precision är +/- 3 grader.
Precisionen kan påverkas av motorvariationer och eftersläpning som inträffar då rotationskraften stoppas.
Batteriets laddning,hjulens storlek, friktionen mellan roboten och underlaget eller avståndet mellan de två hjulen är faktorer som inte längre kan påverka vridningsrörelsens precision.
Reflektera
(20 min.)
Kör programmet och observera.
Placera roboten i startposition 2 på matta 2 och kör programmet.
Dokumentera observationer
- Beskriv vad varje programmeringsblock gjorde:
Roboten vred sig tills gyrosensorn kände av värdet 90 grader. Då stannade roboten. - Uppskatta robotens vridningsvinkel:
Roboten vred sig ungefär 90 grader. - Förklara skillnaden mellan robotens vridningsrörelser med och utan gyrosensorn:
Om robotens vridningsrörelse kontrolleras av gyrosensorn, inverkar färre faktorer på rörelsens precision.
Reflektera och ändra
Ändra programmet så att roboten gör följande vridningsrörelser i en punkt:
- Medurs i 45 grader
- Medurs i 180 grader
- Medurs i 360 grader, följt av en moturs 360 graders vridning i en punkt
Hur mycket vred sig roboten, jämfört med vad den var programmerad att vrida sig?
Den vred sig förmodligen lite mer än det programmerade värdet, på grund av rotationskraft.
Uppgift
Få roboten att vrida sig 45 grader medurs.

Lösning - Programsammanfattning
Starta
Kör – spakstyrning - Styrka B[10], Styrka C[-10]
Vänta - Gyrosensor - Jämför vinkel - Typ [3] (större än eller lika med), Grader [45]Kör – spakstyrning - Av
Felsökning
Vinkeln måste justeras – vanligtvis måste ett lägre värde än 45 grader användas.
Uppgift
Få roboten att vrida sig 180 grader medurs.

Lösning - Programsammanfattning
Programsammanfattning
Starta
Kör – spakstyrning - Styrka B[10], Styrka C[-10]
Vänta - Gyrosensor - Jämför vinkel - Typ [3] (större än eller lika med), Grader [180]
Kör – spakstyrning - Av
Felsökning
Vinkeln måste justeras – vanligtvis måste ett lägre värde än 180 grader användas.
Uppgift
Få roboten att vrida sig medurs i 360 grader och sedan moturs, i en punkt, i 360 grader.

Lösning - Programsammanfattning
Starta
Kör – spakstyrning - Styrka B[10], Styrka C[-10]
Vänta - Gyrosensor - Jämför vinkel - Typ [3] (större än eller lika med), Grader [360]
Kör – spakstyrning - Av
Vänta - Sekunder[2]
Kör – spakstyrning - Styrka B[10], Styrka C[-10]
Vänta - Gyrosensor - Jämför vinkel - Typ [5] (mindre än eller lika med), Grader [0]
Kör – spakstyrning - Av
Fortsätt
(15 min.)
Fortsätta utforska
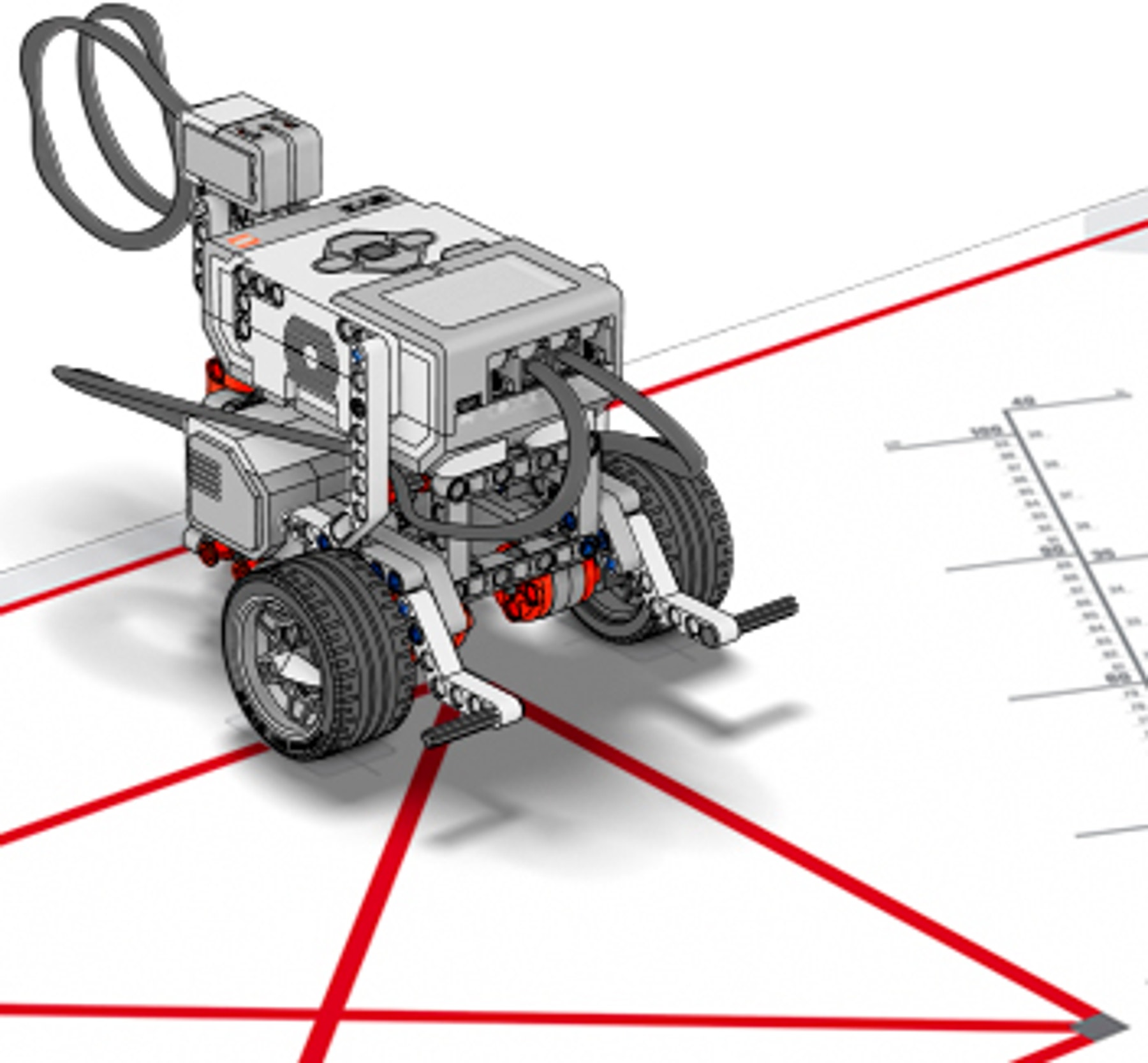
Skapa ett nytt program med en loop som får roboten att åka i en fyrkantsbana.
När du är klar provar du programmet från startposition 4 på övningsmatta 1.

Lösning - Programsammanfattning
Starta
Loop - Antal[4]
Kör – rattstyrning - Grader[682], Styrka[30]
Vänta - Tid[1 s]
Kör – spakstyrning - På, Styrka B[10], Styrka C[-10]
Vänta - Gyrosensor - Ändra vinkel - Riktning[0] (ökning), Grader [85]
Kör – spakstyrning - Av
Vänta - Tid[1 s]
Felsökning
Vinkeln måste justeras – vanligtvis måste ett lägre värde än 90 grader användas.
Beskriv vad en loop kan användas till:
Jag kan använda loopstrukturen för att upprepa händelser.
Valfritt
1.Skapa ett nytt program som får roboten att åka längs en triangelbana. När du är klar provar du programmet från startposition 4 på matta 1.
2.Programmera roboten att åka längs andra typer av konturer.

Nu vet du hur gyrosensorn används för att göra svängar. Bra gjort!
Stöd för lärare
Eleverna lär sig:
Naturvetenskap och teknik
• Mönster
• Orsak och verkan: Mekanism och förklaring
Matematik:
• Lösa verkliga och matematiska problem avseende vinklar, area och volym
• Identifiera och uttrycka regelbundenhet vid upprepat resonerande
Robottekniska inlärningsområden:
• Ge roboten rörelsekontroll genom att använda gyrosensorn
• Förstå skillnaden mellan enklare programmering med vanliga utdata och sensorbaserad programmering
• Sensorers fördelar och begränsningar
LEGO® MINDSTORM®S EV3 Grundset
EV3 Lab eller EV3 Programming
EV3 Rymdutmaningsset