Förgrening
Använd blocket Förgrening för att fatta dynamiska sensorbaserade beslut.
Testa!
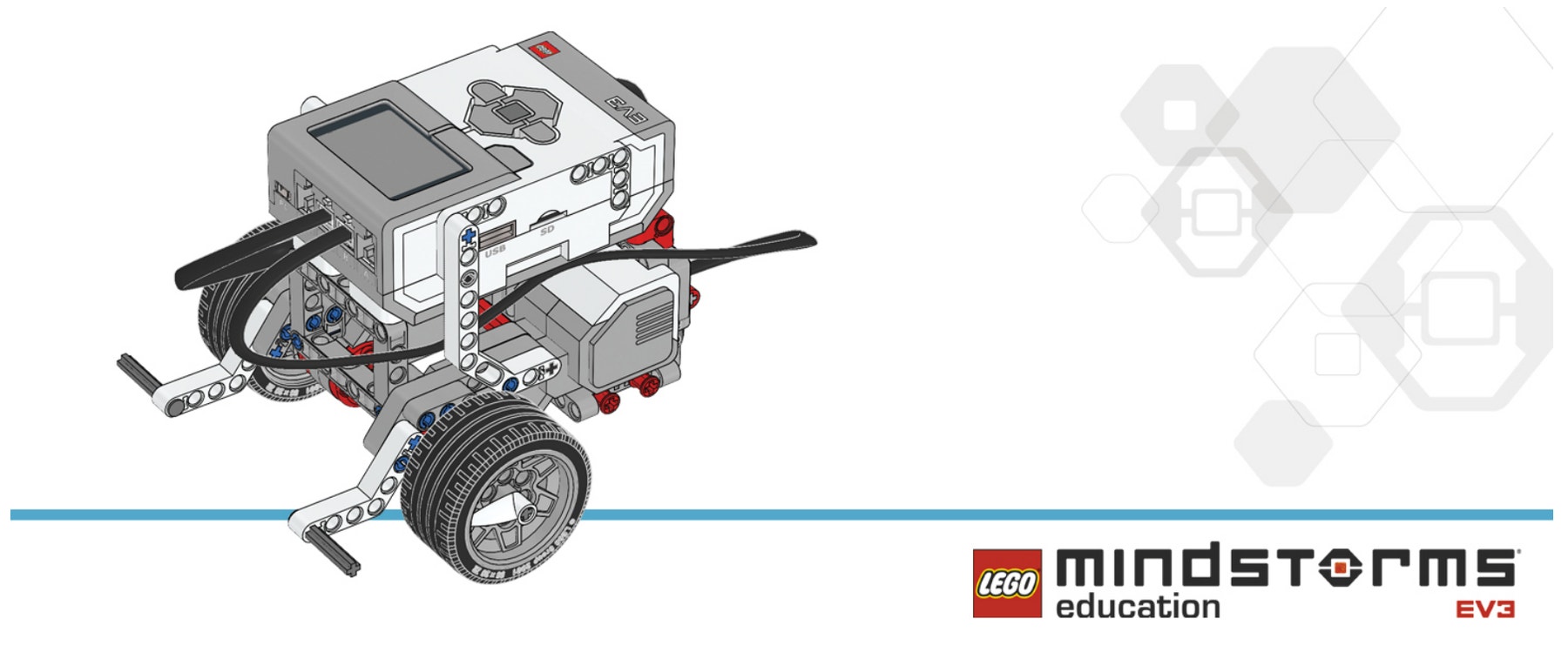
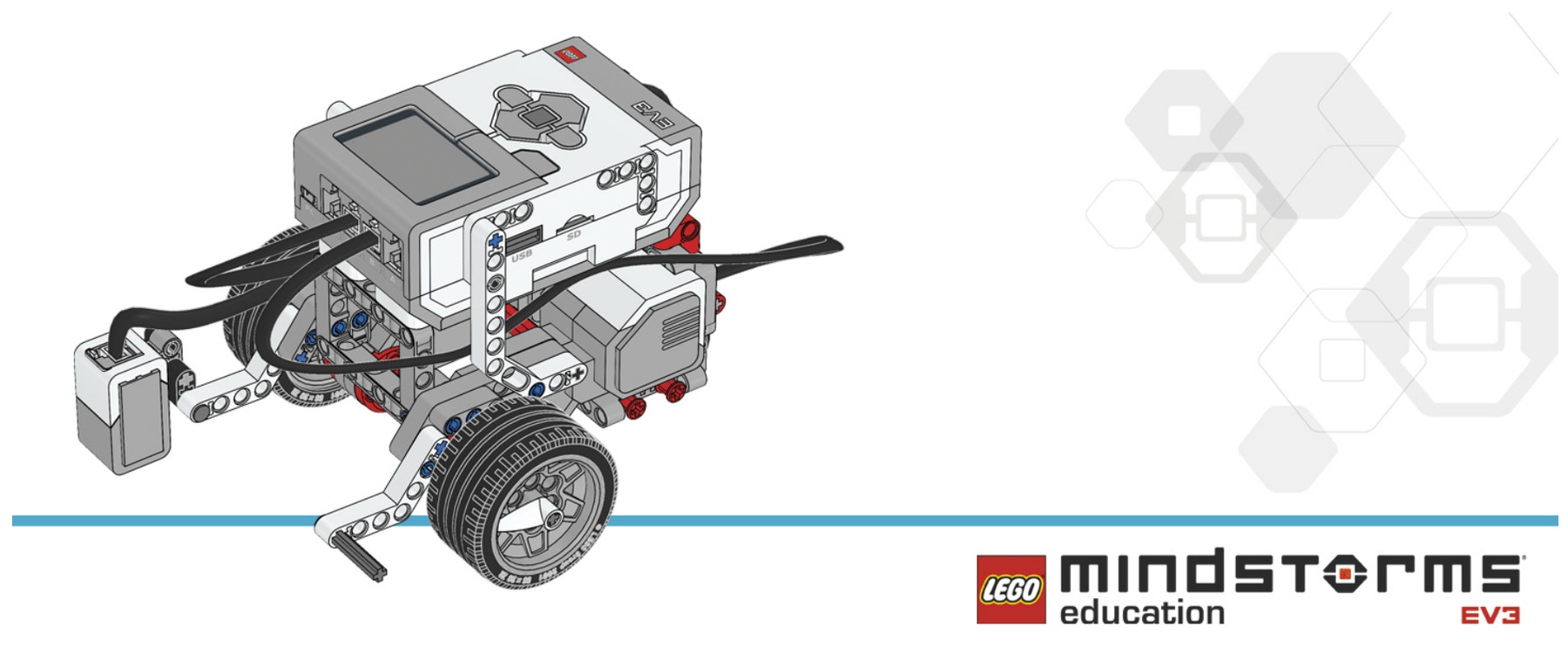
Återskapa det visade programmet, ladda ned det och kör det på prov. Följer körningsbasen inte linjen? Klicka här för att ställa in sensorns tröskelvärde.
Tips
Appen Portvy på EV3-enheten kan också användas för att se sensormätvärden i realtid.
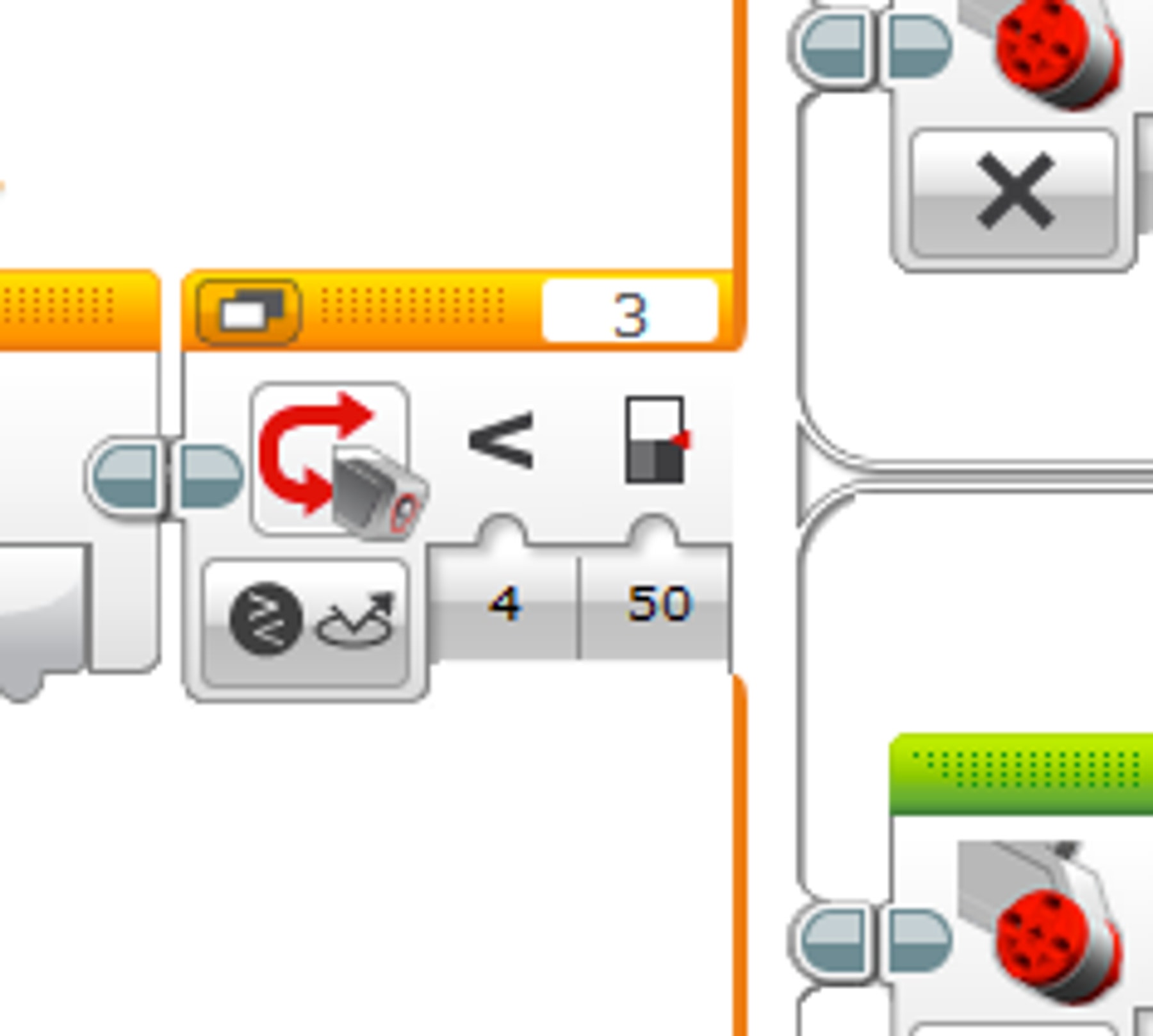
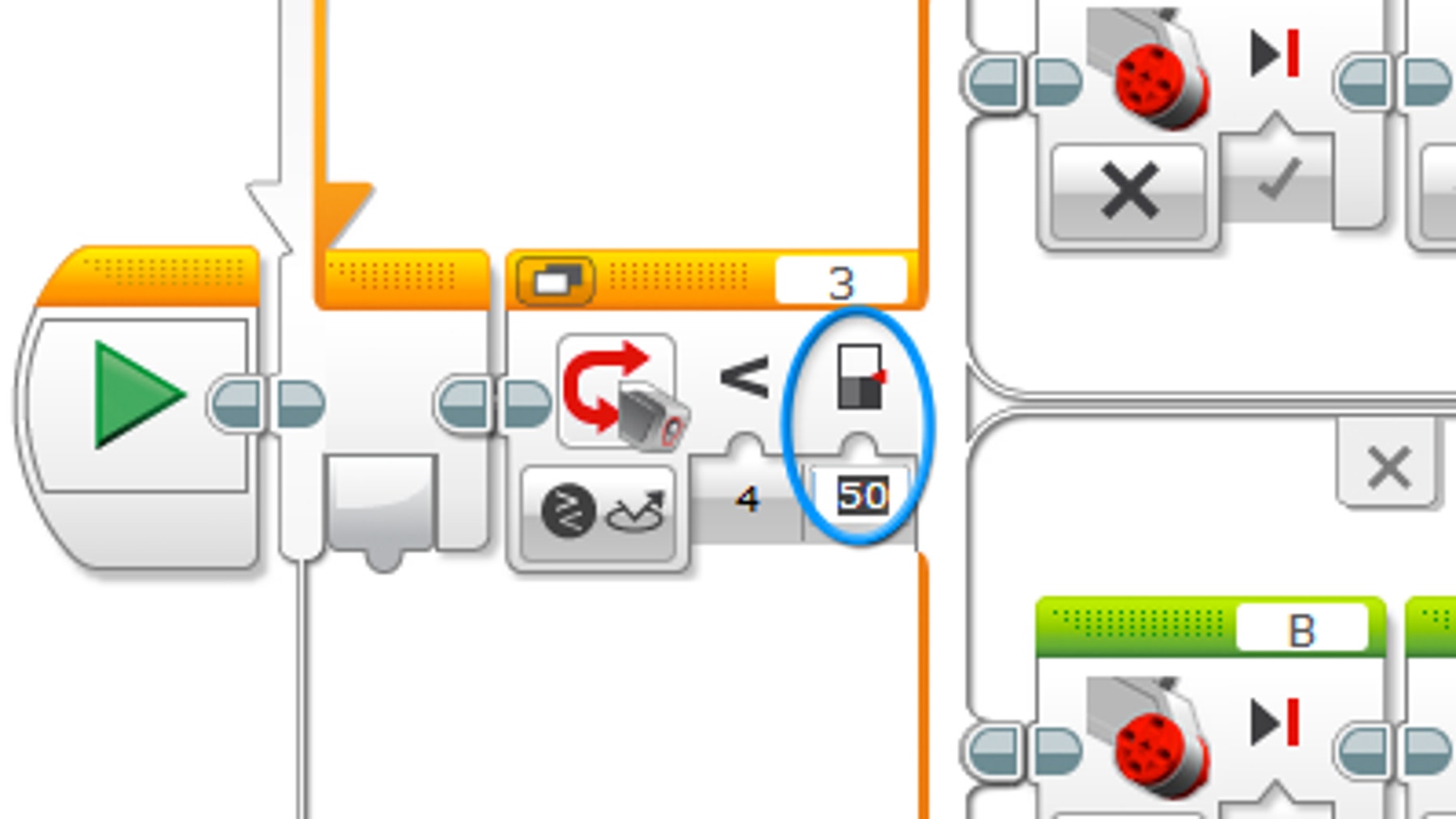
Programsammanfattning
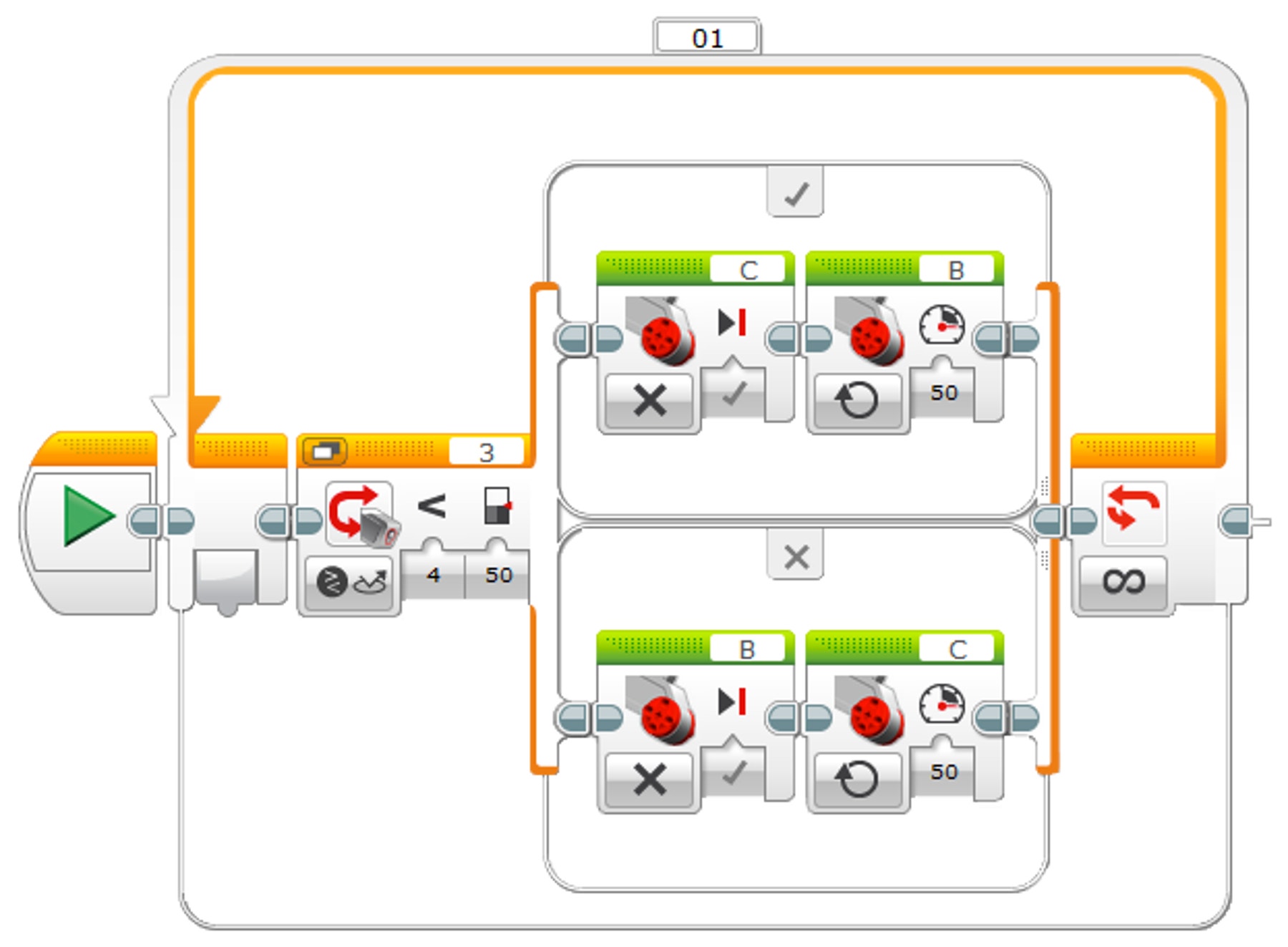
Start
Loop – Obegränsat
Förgrening – Färgsensor – Jämför reflekterad
ljusstyrka [Mindre än, 50]
Om sant: Stor motor C – Av
Om sant: Stor motor B – På
Om falskt: Stor motor B – Av
Om falskt: Stor motor C – På
Ställa in tröskelvärdet
På följande sidor kommer du att mäta värdena för ljusa och mörka områden från Färgsensorn och sedan använda dessa värden för att räkna ut medelvärdet, vilket kommer att bli tröskelvärdet för Färgsensorns ljuskänslighet.
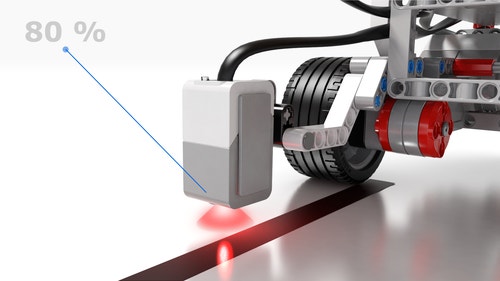
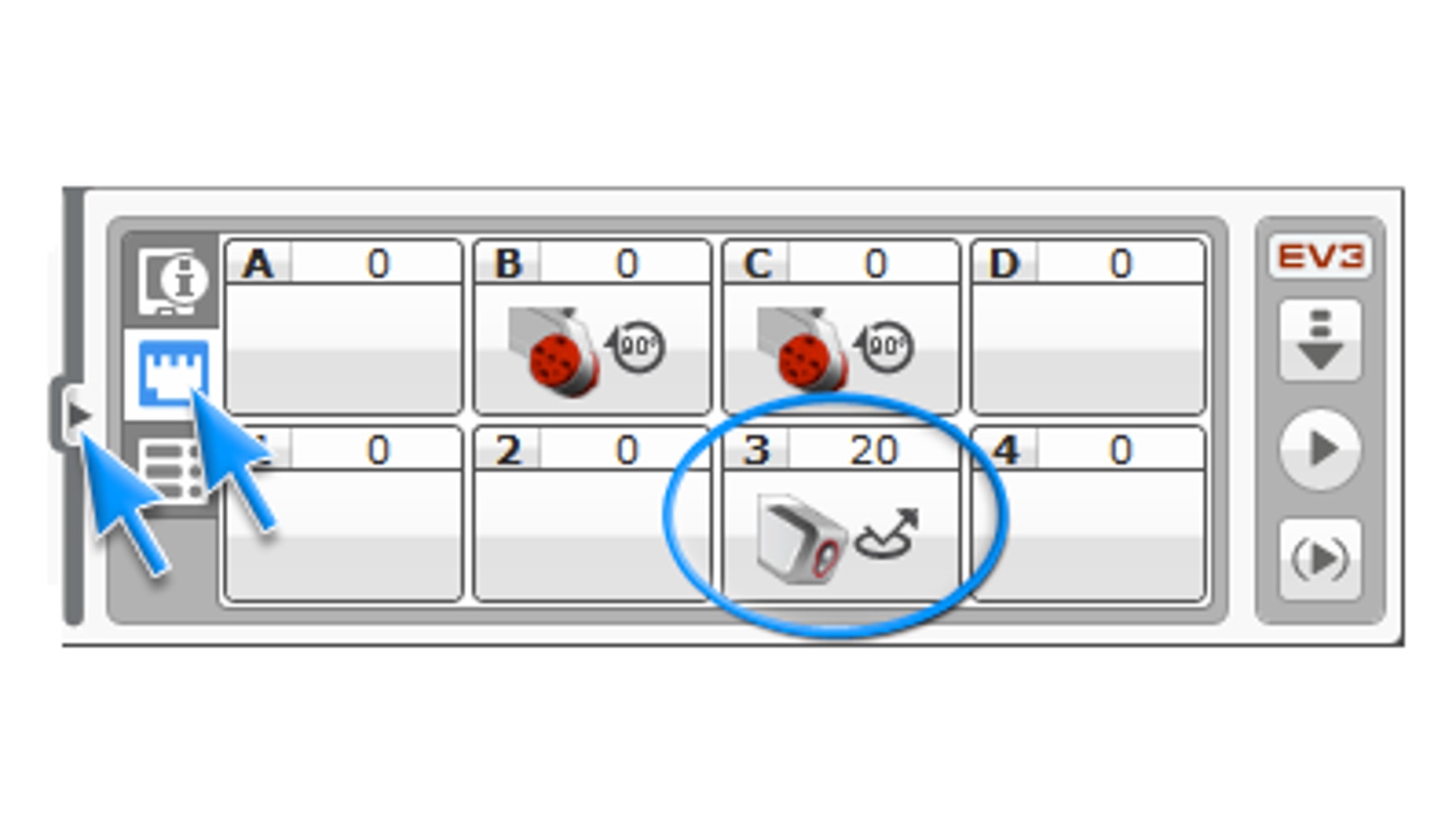
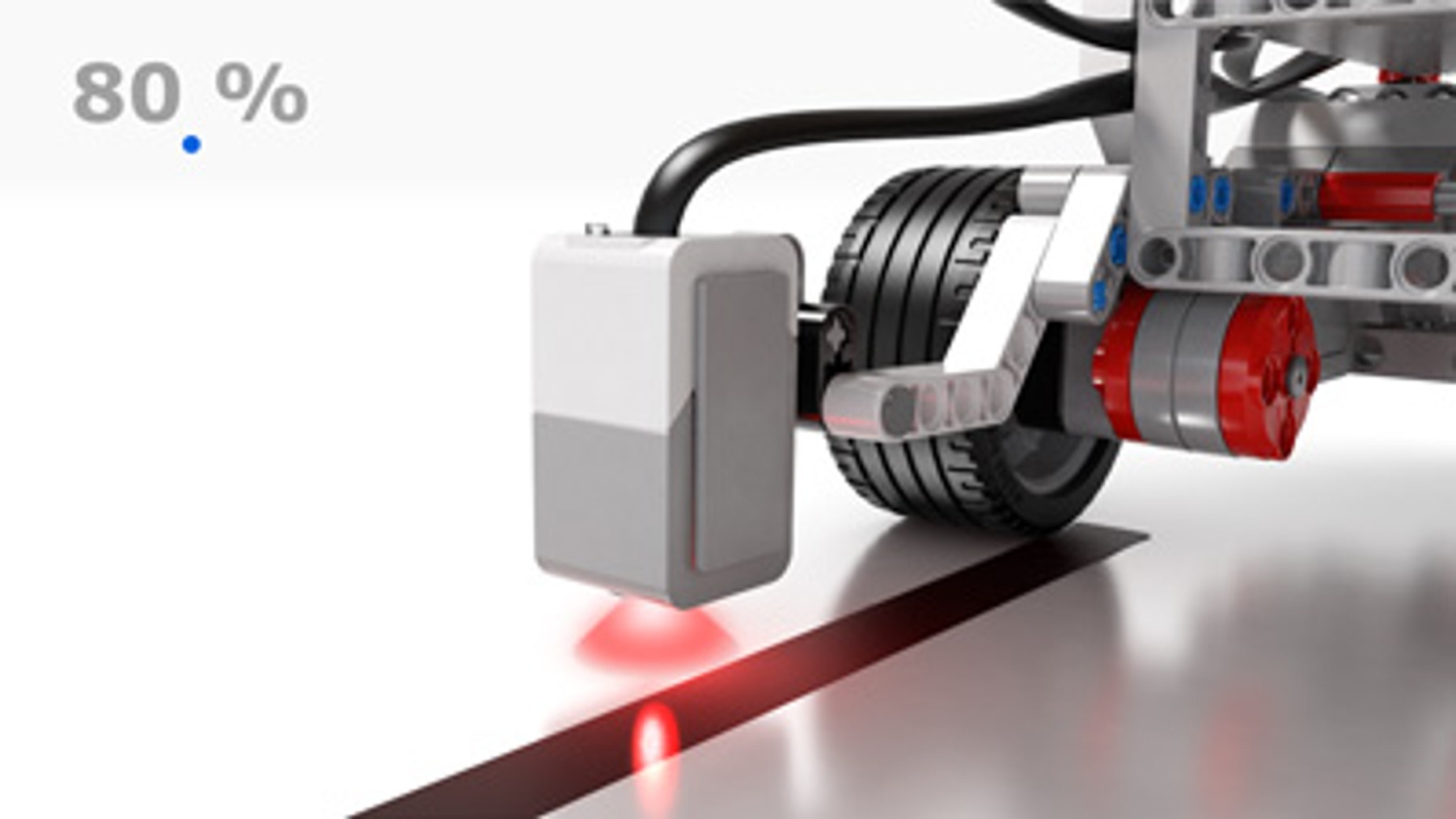
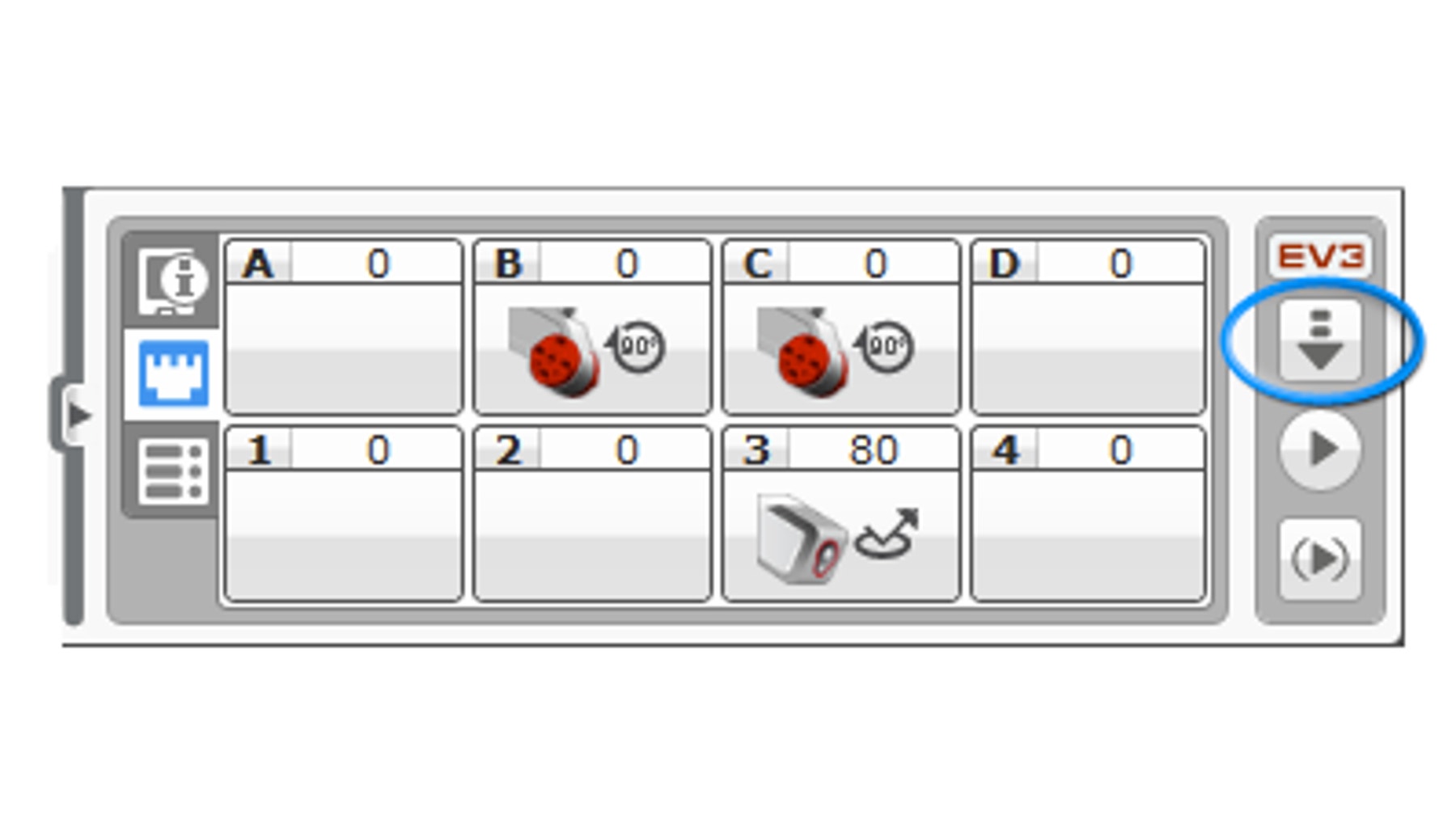
Flytta först färgsensorn över den mörka linjen.

Öppna sedan maskinvarusidan och anteckna värdet som visas på Port 3. Detta är minimivärdet (x).
Flytta sedan färgsensorn bort från den mörka linjen.
Anteckna värdet som visas på port 3. Detta är maximivärdet (y).
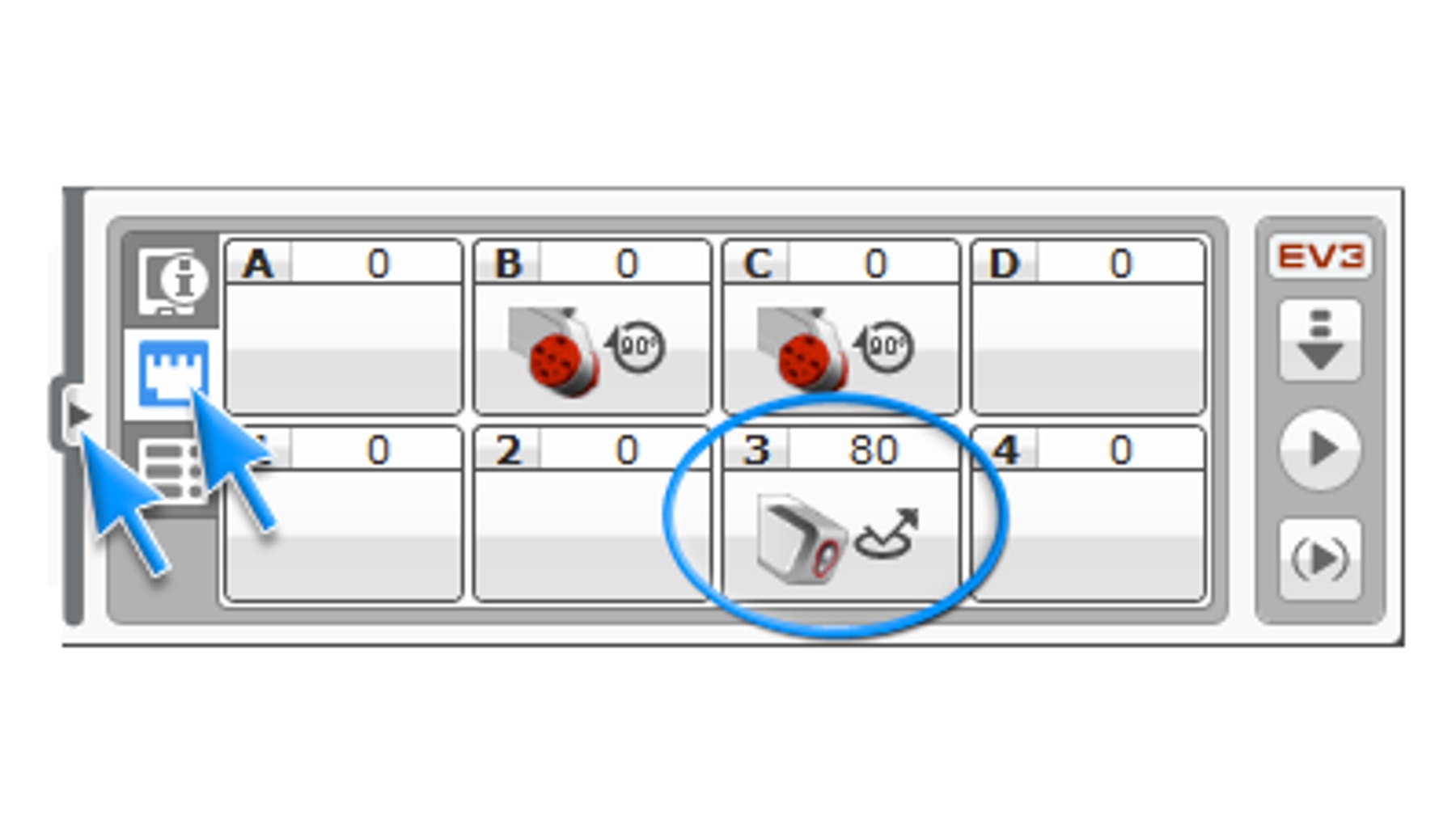
För att bestämma tröskelvärdet beräknas ekvationen (x+y)/2 och resultatet anges i blocket Förgrening (du kan ha andra värden än i exemplet nedan).
Ladda sedan ner programmet.
Ändra!
Nu är det din tur! Testa om din körningsbas klarar att följa en ljusare färgad linje! Om inte, ställ in tröskelvärdet igen.
Felsökning
bland kan ljuset som reflekteras till sensorn överskrida tröskelvärdet, vilket får körningsbasen att gå i en cirkel. Om det händer ska du ändra tröskelvärdet.
Tips
Om skillnaden mellan x- och y-värdena är för liten, kommer inte linjen att upptäckas. Om det händer, kan du försöka kalibrera om sensorn
Vad är nästa steg?

Stöd för lärare
Eleverna kommer att:
Använd blocket Förgrening för att fatta dynamiska sensorbaserade beslut.
LEGO® MINDSTORM®S EV3 Grundset
EV3 Lab eller EV3 Programming