Hitta rätt linje!
Det är lätt att vinna en biltävling. Man behöver bara vara snabbast och hålla sig i sitt körfält.
Skulle det hjälpa om man kunde följa en linje?
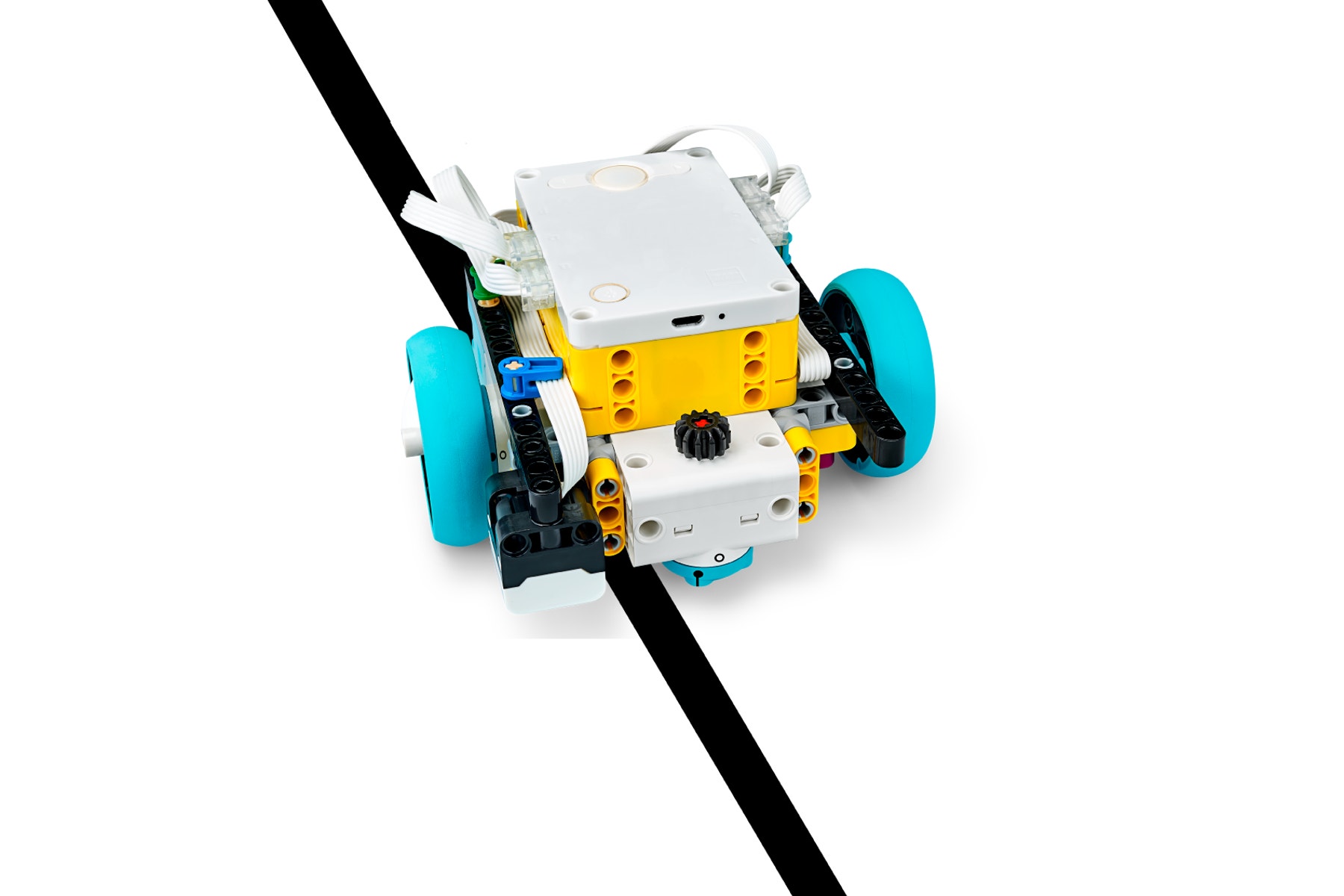
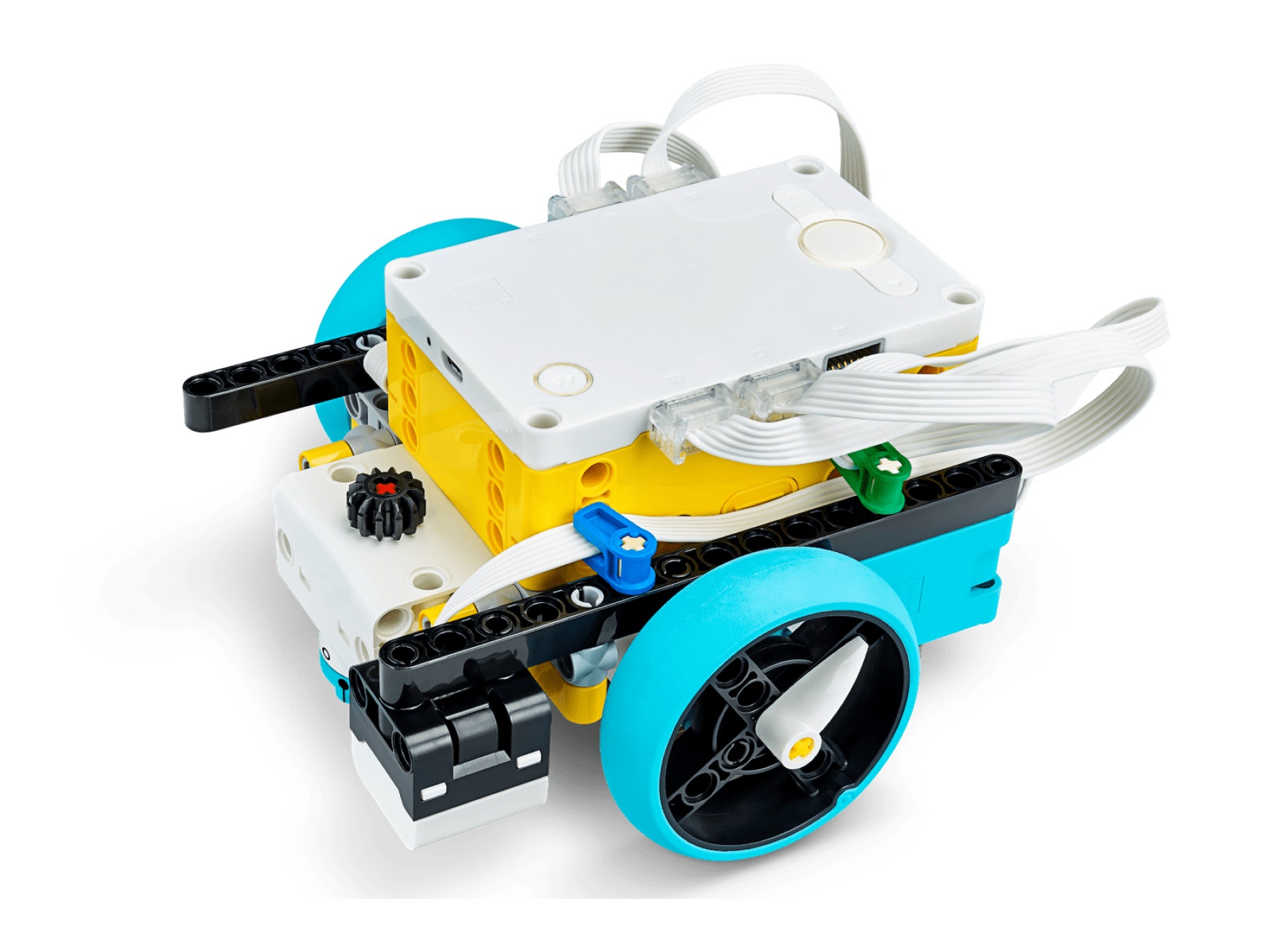
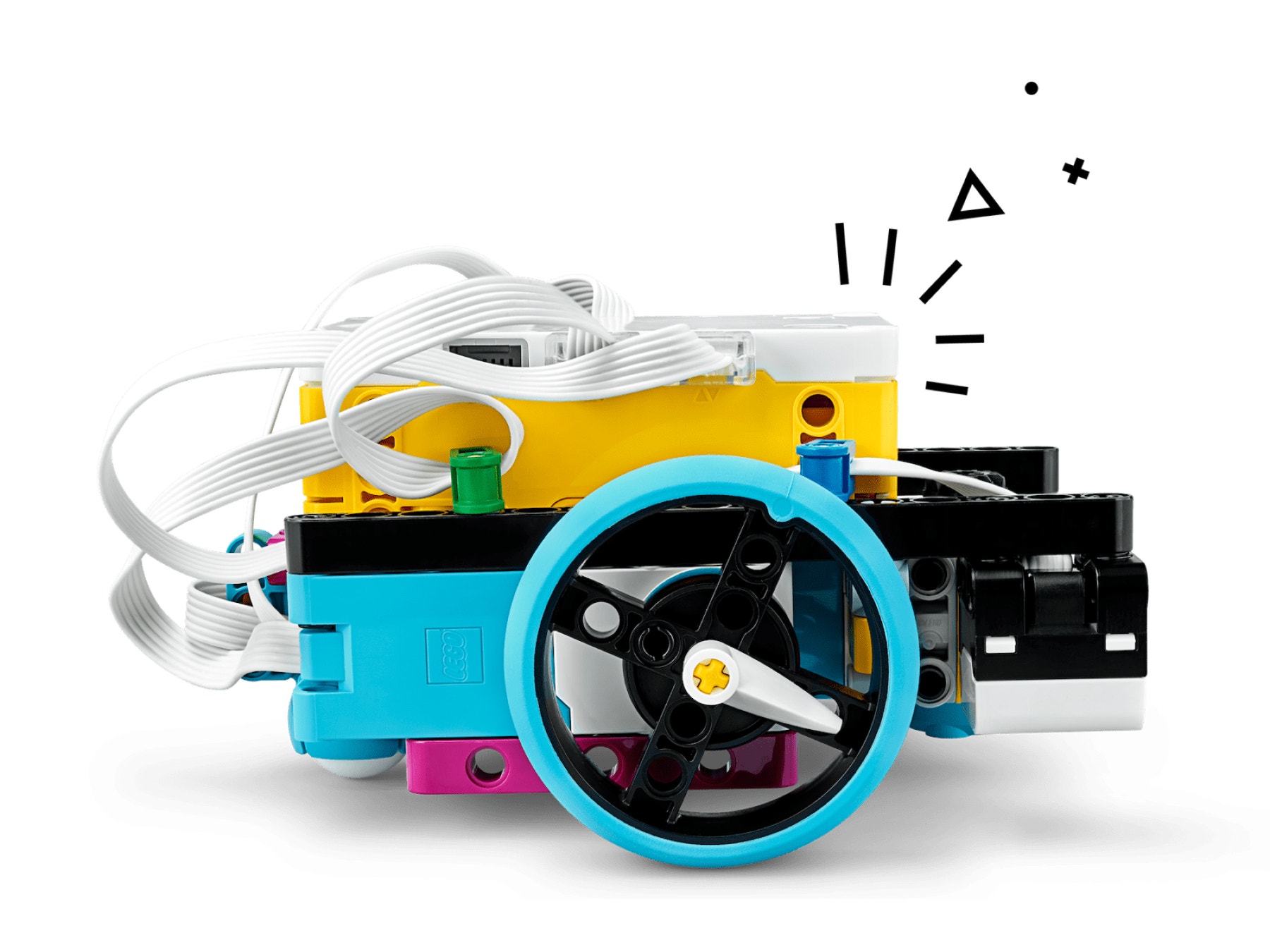
Bygg körningsbasen med en färgsensor.
Nu kör vi!
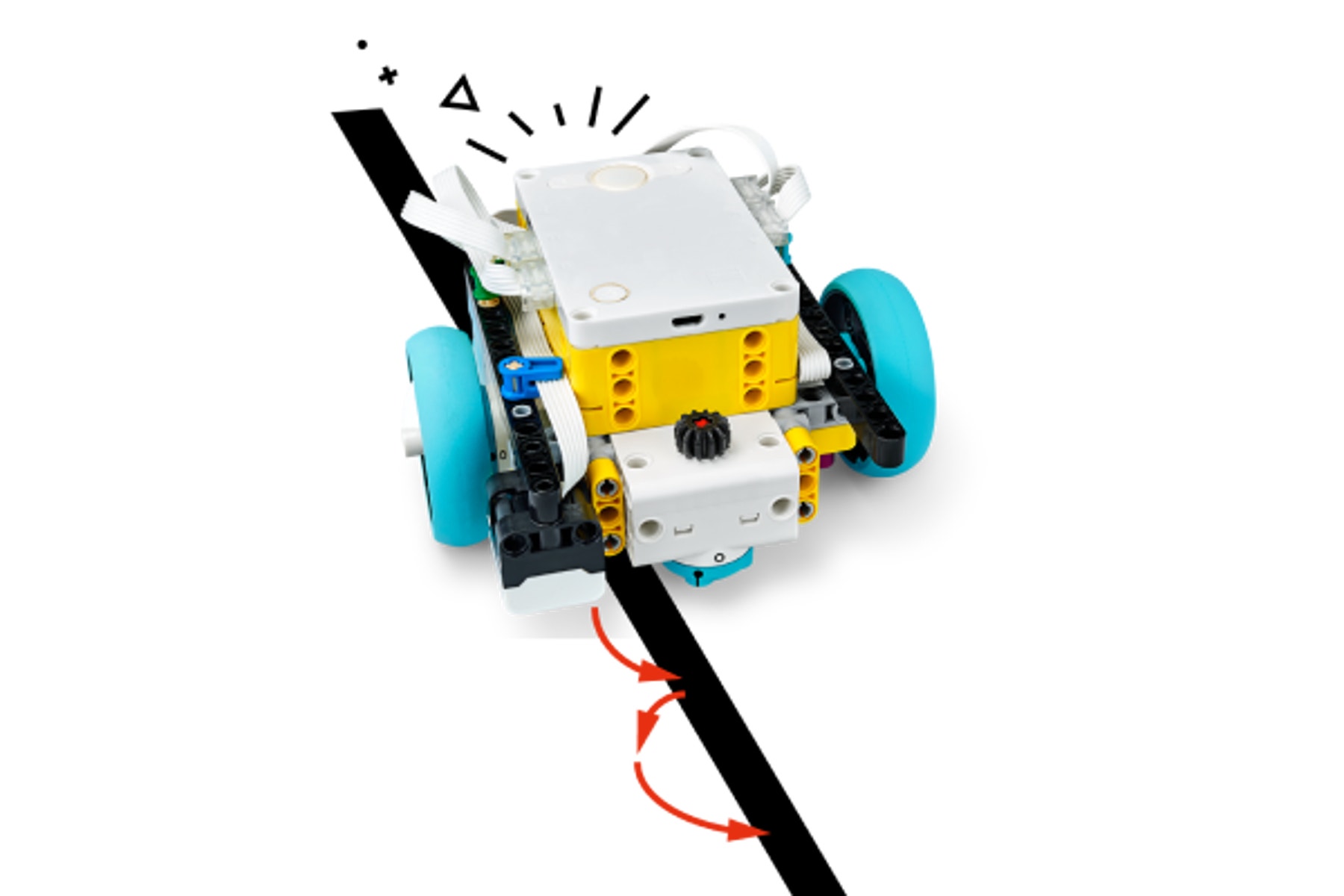
Kör och stanna vid en linje.

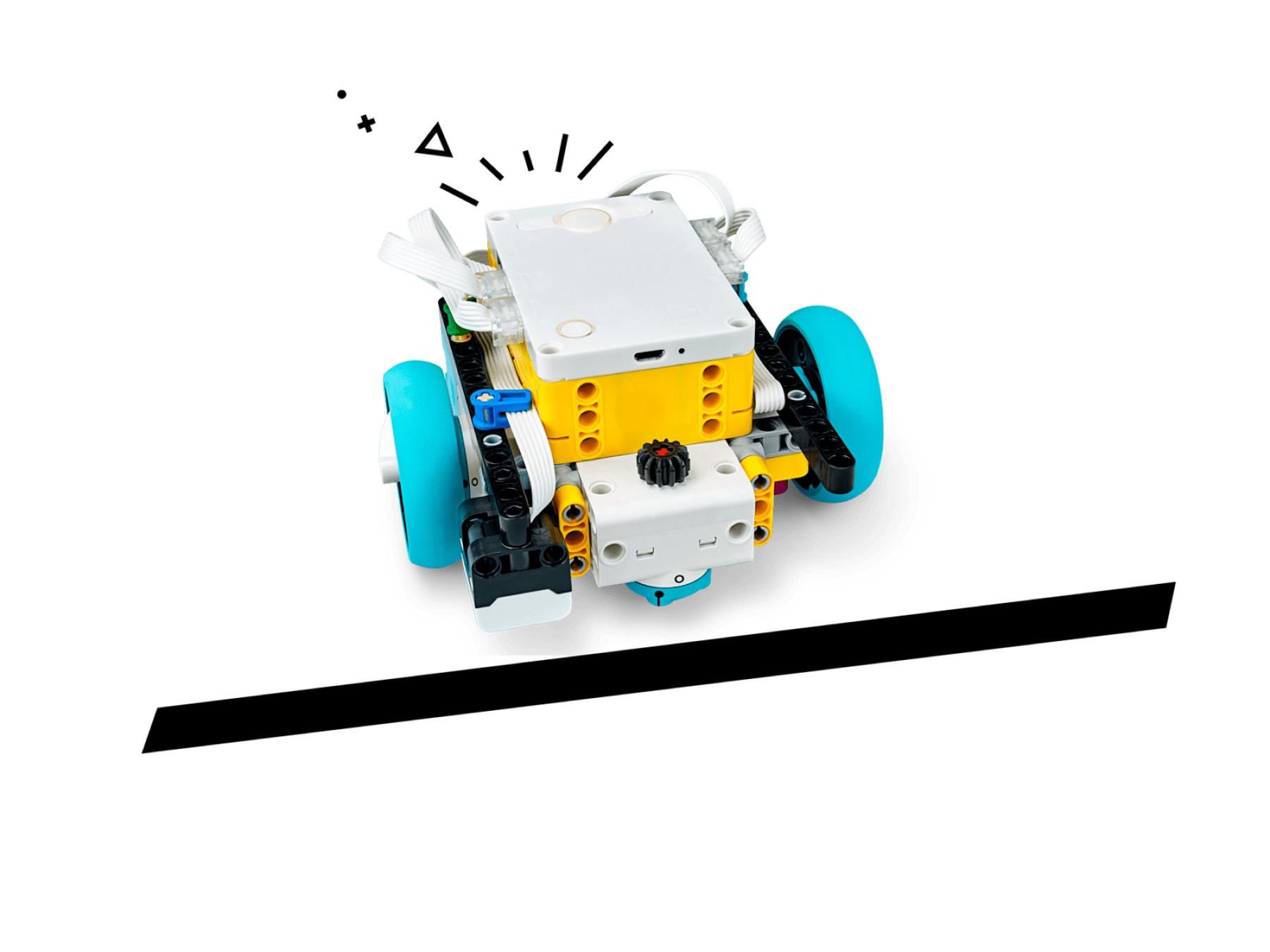
Testa den första programmeringsstapeln och beskriv vad du ser.
Den första stapeln får körningsbasen att stanna vid en linje som är vinkelrät mot dess rörelse.
Linjen kan vara:
- En svart linje ritad på ett papper
- Svart tejp
- Större svarta LEGO klossar
Köra på en linje.
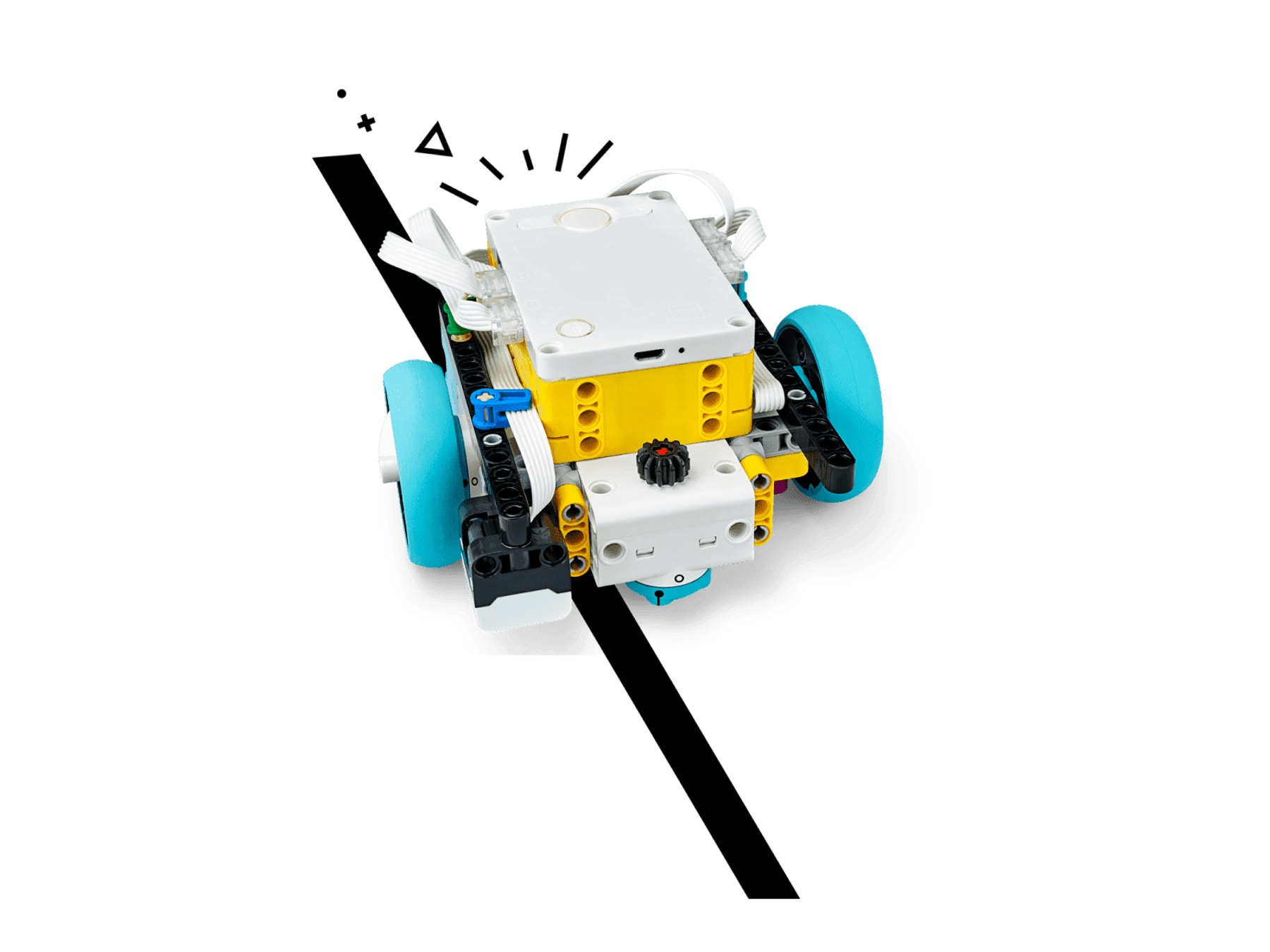
Testa den andra programmeringsstapeln och beskriv vad som händer.
Om färgsensorn upptäcker kanten på den svarta linjen vrids körningsbasen i riktning mot den vita ytan.
När färgsensorn inte upptäcker kanten på den svarta linjen vrids körningsbasen i motsatt riktning i förhållande till den svarta linjen.
Upprepa de här två åtgärderna i oändlighet.
Kanske har du märkt att vi styr motorerna på höger 50 och åt vänster -50. Vet du varför?
För rörelsen längs linjen är det nödvändigt att ha en motor som rör sig och att den andra motorn är stoppad för att körningsbasen ska kunna röra sig framåt. Om körningsbasen svänger för kraftigt kommer den bara att svänga fram och tillbaka på plats.
Optimera programmet för högre fart.
Det finns många sätt att skapa en snabb linjeföljare.
Ordna en tävling för att se vems körningsbas som kan köra snabbast!
Lägg till ett ”IF ELSE”-block för att göra körningen av programmet snabbare.
Fortsätt att utforska linjeföljarprogram – du kommer att bli förvånad över hur mycket det går att öka hastigheten!
Ditt program skulle kunna se ut ungefär så här:

Hur gick det?

Vad gick bra? Finns det något som kunde ha gått ännu bättre?
Bra jobbat! Nu kan du flytta din körningsbas nästan vart som helst på en tävlingsplan.