اصنع روبوت للالتقاط والوضع
قم بتصميم وبناء وبرمجة نظام روبوتي قادر على التقاط جسم ما من مكان ووضعه في مكان آخر.

خطة الدرس
الإعداد
- اقرأ مادة المعلم هذه جيدًا.
- عند الضرورة، خطط لدرس مستعينًا بمواد "الشروع في العمل" الموجودة في برنامج مختبر EV3 أو تطبيق برمجة EV3. وسيساعد ذلك على إلمام طلابك بمجموعة LEGO® MINDSTORMS® Education EV3.
المشاركة (30 دقيقة)
- استعن بالأفكار الموجودة في قسم إثارة مناقشة أدناه لإشراك طلابك في مناقشة بشأن هذا الدرس.
- اشرح المشروع.
- قسّم الفصل إلى فرق من طالبين.
- امنح الطلاب وقتًا لطرح الأفكار وتبادلها.
الاستكشاف (30 دقيقة)
- اطلب من الطلاب إنشاء عدد من النماذج الأولية.
- شجعهم علي استكشاف كل من البناء والبرمجة.
- اطلب من كل فريق بناء حلين واختبارهما.
- زودهم بورقه رسم بياني كبيرة وأقلام رصاص ملونة أو أقلام علام ملونه.
الشرح (60 دقيقة)
- اطلب من الطلاب اختبار حلولهم واختيار الأفضل من بينها.
- تأكد من أنهم يستطيعون إنشاء جداول الاختبار خاصتهم.
- اترك بعض الوقت حتى ينتهي كل فريق من مشروعه ويجمع الأصول لتوثيق عمله.
التوضيح (60 دقيقة)
- اترك لطلابك بعض الوقت لعمل تقاريرهم النهائية.
- يسِّر جلسة مشاركة حيث يعرض كل فريق نتائجه.
التقييم
- قدم الملاحظات عن أداء كل طالب.
- يمكنك الاستعانة بنماذج التقييم المتوفرة لتبسيط العملية.
إثارة مناقشة
روبوتات الالتقاط والوضع هي نوع من الروبوتات الصناعية التي لديها القدرة علي نقل الأجسام من والي الأماكن المحددة مسبقًا. استنادا إلى شكل الأجسام ووزنها وقابليتها للكسر، يمكن استخدام أنواع مختلفة من أدوات الإمساك لالتقاط الأجسام وإفلاتها مرة أخرى بأمان ودقة.
شجع إجراء عملية عصف ذهني فعالة.
اطلب من طلابك التفكير في هذه الأسئلة:
- ما هو روبوت الالتقاط والوضع وأين يُستخدم؟
- ما نوع الآلية الميكانيكية التي يمكن استخدامها لالتقاط الجسم؟
- كيف يمكن للروبوت نقل الجسم؟
- كيف يمكن للروبوت وضع الجسم في مكان آخر بحرص وبدقة؟
شجع الطلاب علي توثيق أفكارهم الأولية وشرح سبب اختيارهم الحل الذي سيستخدمونه للنموذج الأولي خاصتهم. اطلب منهم أن يصفوا كيف سيقيّمون أفكارهم خلال المشروع. وبهذه الطريقة، عندما يبلغ الطلاب مرحلتي المراجعة والتنقيح، سيكون لديهم معلومات محددة يمكنهم استخدامها لتقييم حلهم وتحديد ما إذا كان فعالاً أم لا.
الملحقات
ملحق فنون اللغة
لإدماج تنمية مهارات فنون اللغة، اطلب من طلابك:
الخيار 1
- استخدام عملهم الكتابي و/أو الرسومات و/أو الصور لتلخيص عملية التصميم الخاصة بهم وإنشاء تقرير نهائي.
- إنشاء فيديو يوضح عملية التصميم الخاصة بهم بدءًا من أفكارهم الأولية وانتهاءً بمشروعهم المكتمل.
- إنشاء عرض تقديمي بشأن برنامجهم.
- إنشاء عرض تقديمي يربط مشروعهم بتطبيقات واقعية لأنظمة مماثلة ويصف الاختراعات الجديدة التي يمكن ابتكارها بناءً على ما قاموا بإنشائه.
الخيار 2
لإدماج تنمية مهارات فنون اللغة، اطلب من طلابك:
دراسة الآلات المختلفة التي تتولى تحضير الأدوية واللقاحات، ومن ثم، إنشاء سرد يتعلق بالعمل في مختبر آلي لتحضير الأدوية، مع ذكر أحد أوجه القوة وكذلك أحد أوجه الضعف لنظام تحضير الأدوية آليًا
من منظور حماية البيانات، مناقشة مخاوف حقوق التأليف والنشر النابعة من تخزين "وصفات" الأدوية التي قد تتعدى قيمتها مليارات الدولارات في نظام تخزين على شبكة الإنترنت، مع مراعاة:
العواقب المحتملة لفقدان الشركة لبيانات الدواء
فوائد تخزين المعلومات الحساسة في أنظمة تخزين على شبكة الإنترنت
ملحق الرياضيات
في هذا الدرس، أنشأ طلابك روبوت التقاط ووضع. وكما هو الحال مع العديد من الأنظمة الآلية، فإن تقييم الأداء وتحسينه أمر بالغ الأهمية. التعلّم الآلي عبارة عن عملية تستطيع من خلالها روبوتات الالتقاط والوضع قياس أدائها، وإجراء تعديلات للحفاظ على هذا الأداء أو تحسينه.
لدمج تنمية مهارات الرياضيات، واستكشاف التعلّم الآلي، اطلب من طلابك:
- تعريف مصطلحي "الدقة" و"الإحكام"، وتطبيق هذين التعرفين في مشاريع الروبوت الخاصة بهم
- تحديد المتغيرات التي تتعلق بالدقة والإحكام في أنظمتهم (على سبيل المثال، قد تؤثر سرعة الروبوت على دقته أو إحكامه أو كليهما)
- إعداد تجارب مصغرة لاختبار ما إذا كانت المتغيرات التي يختارونها تؤثر على الدقة أو الإحكام أو كليهما
نصائح البناء
أفكار البناء
امنح طلابك فرصة لبناء بعض النماذج من الروابط أدناه. شجّعهم على استكشاف كيفية عمل هذه الأنظمة وطرح الأفكار حول كيفية استلهام حل لملخص تصميم منها.
نصائح الاختبار
شجع طلابك على تصميم إعداد وإجراءات الاختبار الخاصة بهم لتحديد أفضل الحلول. يمكن أن تساعد هذه النصائح طلابك أثناء إعداد الاختبار الخاص بهم:
- حدد موضع الآلة على ورقة الرسم البياني للمساعدة في ضمان وضعها في الموضع نفسه في كل تجربة اختبار.
- استخدم خطوط الشبكة لتحديد مربعات 1 سم × 1 سم للمساعدة في تسجيل نتائج كل تجربة اختبار.
- استخدم أقلام رصاص أو علام ملونه لوضع علامة علي الموقع المتوقع والفعلي حيث يضع الروبوت الجسم.
- أنشئ جداول اختبار لتسجيل ملاحظاتك.
- قيِّم دقه الروبوت خاصتك عن طريق مقارنه النتائج المتوقعة مع النتائج الفعلية.
- كرر الاختبار ثلاث مرات على الأقل.
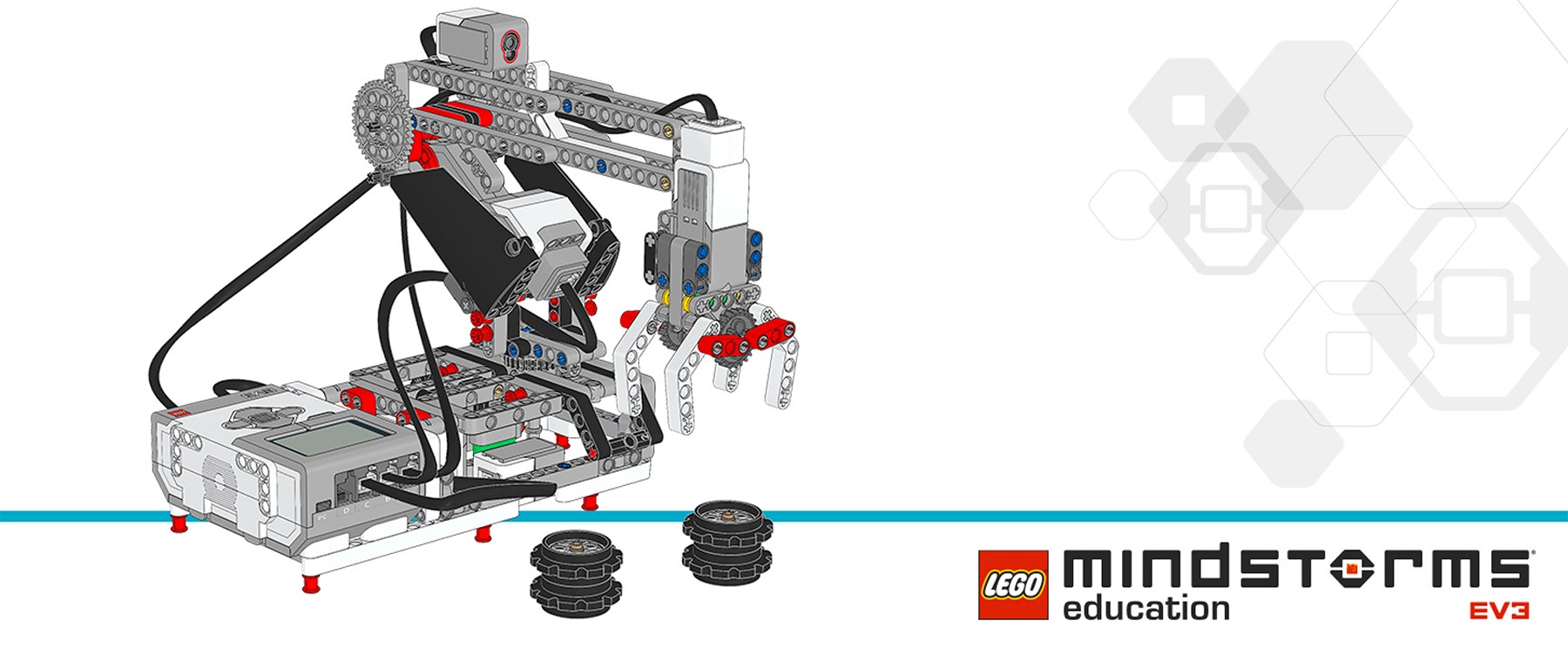
مثال لحل
فيما يلي مثال لحل يلبي معايير ملخص التصميم:

نصائح البرمجة
نموذج برنامج EV3 MicroPython
#!/usr/bin/env pybricks-micropython
from pybricks import ev3brick as brick
from pybricks.ev3devices import Motor, TouchSensor, ColorSensor
from pybricks.parameters import (Port, Stop, Direction, Button,
ImageFile, SoundFile)
from pybricks.tools import wait
# Configure the gripper motor with default settings.
gripper_motor = Motor(Port.A)
# Configure the elbow motor. It has an 8-tooth and a 40-tooth gear
# connected to it. Set the motor direction to counterclockwise, so
# that positive speed values make the arm move upward.
elbow_motor = Motor(Port.B, Direction.COUNTERCLOCKWISE, [8, 40])
# Configure the motor that rotates the base. It has a 12-tooth and a
# 36-tooth gear connected to it. Set the motor direction to
# counterclockwise, so that positive speed values make the arm move
# away from the Touch Sensor.
base_motor = Motor(Port.C, Direction.COUNTERCLOCKWISE, [12, 36])
# Limit the elbow and base accelerations. This results in very smooth
# motion, like that of an industrial robot.
elbow_motor.set_run_settings(60, 120)
base_motor.set_run_settings(60, 120)
# Set up the Touch Sensor. It is used to detect when the base has
# moved to its starting position.
touch_sensor = TouchSensor(Port.S1)
# Set up the Color Sensor. It is used in Reflected Light Intensity
# Mode to detect the white beam when the elbow is in its starting
# position.
color_sensor = ColorSensor(Port.S3)
# Initialize the elbow. This is done by first moving down for 1 second
# and then slowly moving up until the Color Sensor detects the white
# beam. Then the motor stops, holds its position, and resets the angle
# to "0." This means that when it rotates backward to "0" later on, it
# returns to this starting position.
elbow_motor.run_time(-30, 1000)
elbow_motor.run(15)
while color_sensor.reflection() < 30:
wait(10)
elbow_motor.stop(Stop.HOLD)
elbow_motor.reset_angle(0)
# Initialize the base. This is done by first running the base motor
# counterclockwise until the Touch Sensor is pressed. Then the motor
# stops, holds its position, and resets the angle to "0." This means
# that when it rotates backward to "0" later on, it returns to this
# starting position.
base_motor.run(-60)
while not touch_sensor.pressed():
wait(10)
base_motor.stop(Stop.HOLD)
base_motor.reset_angle(0)
# Initialize the gripper. This is done by running the motor forward
# until it stalls. This means that it cannot move any further. From
# this closed gripper position, the motor rotates backward by 90
# degrees, so the gripper opens up. This is the starting position.
gripper_motor.run_until_stalled(200, Stop.COAST, 50)
gripper_motor.reset_angle(0)
gripper_motor.run_target(200, -90)
def robot_pick(position):
# This function rotates the base to the pick up position. There,
# it lowers the arm, closes the gripper, and raises the arm to pick
# up the wheel stack.
base_motor.run_target(60, position, Stop.HOLD)
elbow_motor.run_target(60, -45)
gripper_motor.run_until_stalled(200, Stop.HOLD, 50)
elbow_motor.run_target(60, 0, Stop.HOLD)
def robot_release(position):
# This function rotates the base to the drop-off position. There,
# it lowers the arm, opens the gripper to release the wheel stack,
# and raises the arm again.
base_motor.run_target(60, position, Stop.HOLD)
elbow_motor.run_target(60, -45)
gripper_motor.run_target(200, -90)
elbow_motor.run_target(60, 0, Stop.HOLD)
# Define the 3 destinations for picking up and dropping off the wheel
# stacks.
LEFT = 200
CENTER = 100
RIGHT = 0
# Rotate the base to the center.
base_motor.run_target(60, CENTER, Stop.HOLD)
# This is the main part of the program. It is a loop that repeats
# endlessly.
#
# First, the robot waits until the Up or Down Button is pressed.
# Second, the robot waits until the Center Button is pressed.
# Finally, the robot picks up the wheel stack and drops it off in the
# center.
#
# Then the process starts over, so the robot can pick up another wheel
# stack.
while True:
# Display a question mark to indicate that the robot should await
# instructions.
brick.display.image(ImageFile.QUESTION_MARK)
# Wait until the Up or Down Button is pressed.
while True:
# First, wait until any button is pressed.
while not any(brick.buttons()):
wait(10)
# Then store which button was pressed.
button = brick.buttons()[0]
# If the Up or Down Button was pressed, break out of the loop.
if button in (Button.UP, Button.DOWN):
break
# Play a sound and display an arrow to show where the arm will move.
brick.sound.file(SoundFile.AIR_RELEASE)
if button == Button.UP:
brick.display.image(ImageFile.FORWARD)
elif button == Button.DOWN:
brick.display.image(ImageFile.BACKWARD)
# Wait until the Center Button is pressed, then display a check
# mark to indicate that the instruction has been accepted.
while not Button.CENTER in brick.buttons():
wait(10)
brick.display.image(ImageFile.ACCEPT)
# Pick up the wheel stack. Depending on which button was pressed,
# move left or right.
if button == Button.UP:
robot_pick(RIGHT)
elif button == Button.DOWN:
robot_pick(LEFT)
# Drop off the wheel stack in the center.
robot_release(CENTER)
الروابط المهنية
قد يرغب الطلاب الذين استمتعوا بهذا الدرس في استكشاف هذه المسارات المهنية:
- تكنولوجيا المعلومات (برمجة الحاسوب)
- التصنيع والهندسة (تكنولوجيا الآلات)
فرص التقييم
القائمة المرجعية لملاحظات المعلم
أنشيء مقياسًا يناسب احتياجاتك، على سبيل المثال:
- منجز بصورة جزئية
- منجز بالكامل
- منجز بصورة تتجاوز الهدف المحدد
استعن بمعايير النجاح التالية لتقييم مدى تقدم طلابك:
- يستطيع الطلاب تقييم حلول التصميم المتنافسة بناءً على المعايير ذات الأولوية واعتبارات المقايضة.
- يستطيع الطلاب العمل بشكلٍ مستقل لتطوير حل إبداعي وعملي.
- يستطيع الطلاب توصيل أفكارهم بوضوح.
التقييم الذاتي
عقب قيام طلابك بجمع بعض بيانات الأداء، امنحهم الوقت للتفكير في حلولهم. ساعدهم من خلال طرح الأسئلة، مثل:
- هل الحل الخاص بك يلبي معايير ملخص التصميم ؟
- هل يمكن جعل حركة الروبوت خاصتك أكثر دقة؟
- اذكر بعضًا من الطرق التي انتهجها الطلاب الآخرون في حل المشكلة؟
اطلب من طلابك التفكير في طريقتين لتحسين حلولهم وتوثيقهما.
ملاحظات النظراء
شجع الطلاب على إجراء عملية مراجعة النظراء بحيث تتولى كل مجموعة مهمة تقييم مشروعاتها ومشروعات المجموعات الأخرى. ويمكن لعملية المراجعة هذه مساعدة الطلاب في تنمية مهارات إبداء الملاحظات البنَّاءة وكذلك صقل مهارات التحليل والقدرة على استخدام البيانات الموضوعية لإقامة الحجة.
دعم المعلم
سيقوم الطلاب بما يلي:
-استخدام عملية التصميم لحل مشكله ما في العالم الحقيقي
مجموعة LEGO®® MINDSTORMS®® Education EV3 الأساسية
ورقة رسم بياني كبيرة أو ورقة مطبوع عليها خطوط شبكية
أقلام رصاص أو أقلام ملونة
UAE MOE DAA Standards
Basic Knowledge and Skills for design -G9
Develop understanding of quality, accuracy and the role of specialist tools and equipment.
UAE MOE AND Standards
(G9 2.2.3) - (G10 2.2.3)
Use research and analysis to solve design problems and understand how to reformulate problems given to them
UAE MOE AND Standards
(G11 2.3.1) - (G122.3.1)
Describe how pupils can create several design alternatives.
UAE MOE AND Standards
(G9 2.4.1) - (G10 2.4.1)
Generate and communicate their design through annotated sketches, detailed plans, 3-D and mathematical modelling, oral and digital presentations.
UAE MOE AND Standards
(G9 2.4.3)- (G10 2.4.3)
Evaluate their ideas and design plans against design criteria.
UAE MOE AND Standards
(G12 2.4.3)
Develop knowledge, understanding, and skills in managing resources and producing quality design solutions.
UAE MOE Evaluation Standards
Exploration (G9~12.4.1) - Assessment (G9~12.4.2) – Enhancement (G9~12.4.3) – Documentation (G9~12.4.4)
مادة الطالب
ورقة عمل الطالب
قم بالتنزيل أو العرض أو المشاركة كصفحة HTML عبر الويب أو كملف PDF قابل للطباعة.