الانعطاف باستخدام المستشعر
م�همتك هي برمجة الروبوت لإتمام انعطاف حول محوره إلى زاوية معينة باستخدام مستشعر الانعطاف.
خطوة بخطوة
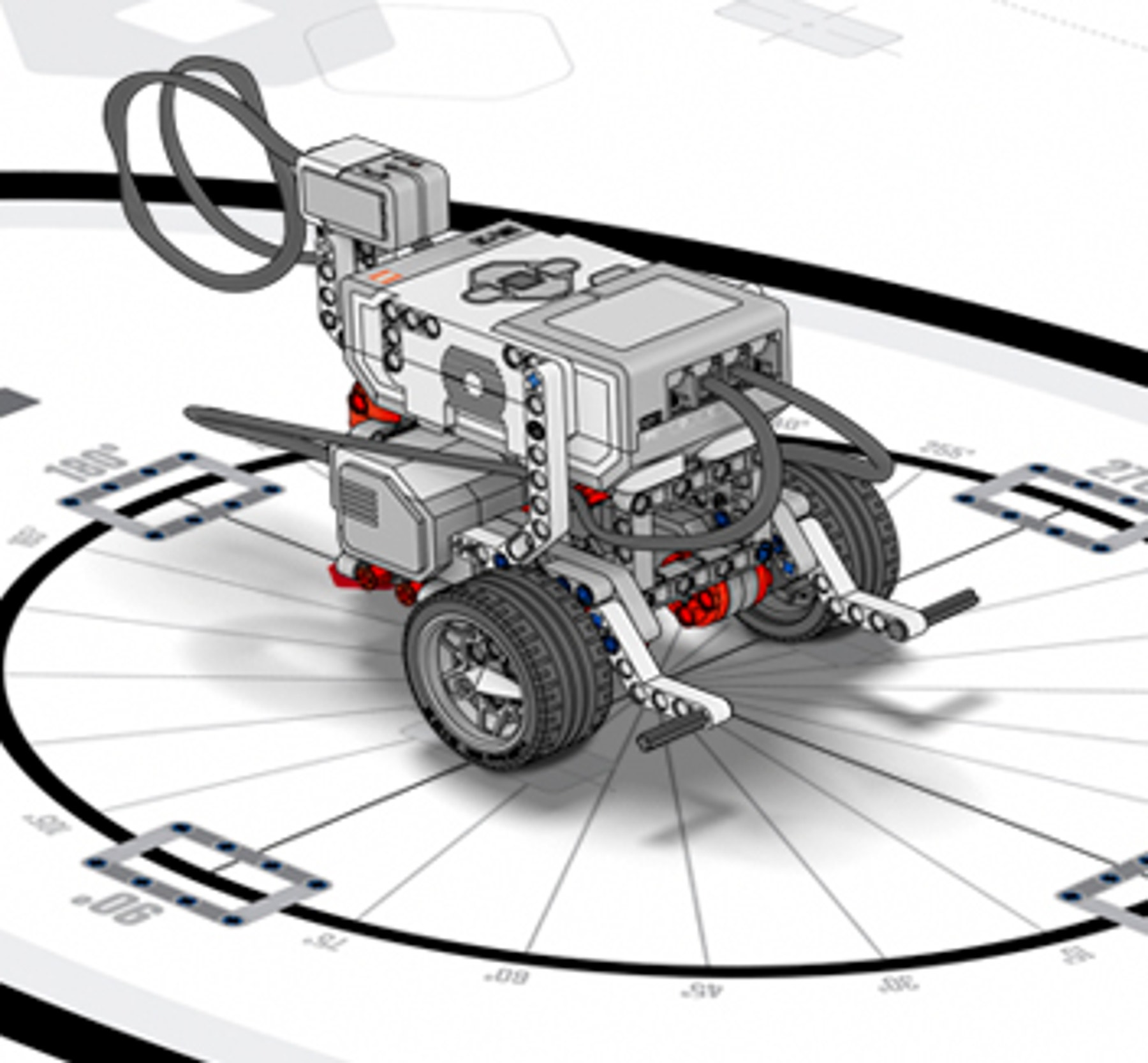
1- قم ببناء الروبوت الخاص بك.
2- قم بإنشاء البرنامج الخاص بك.
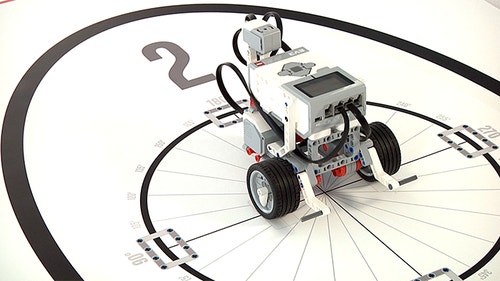
3- ضع الروبوت في الموضع 2 على الخريطة 2، ثم قم بتشغيل البرنامج.
4- وثِّق الاستنتاجات التي توصلت إليها.
5- استمر في تعلم المزيد عن استخدام مستشعر الانعطاف للتحكم في حركات الروبوت.
وقبل أن تبدأ هذه المهمة، ربما ينبغي لك مطالعة هذين الدرسين التعليميين في "معلِّم الروبوت
الوقوف بزاوية *":
الحركة الحلقية *
خلال هذه المهمة، يستكشف الطلاب العلاقة بين دخل المستشعر وسلوك الروبوت.
ويتم التحكم في دورات قاعدة القيادة باستخدام مستشعر الانعطاف.
لاحظ الطلاب حتى تقرر إذا ما كانوا
يستخدمون المصطلحات الصحيحة، و
يعرفون وظيفة قوالب البرمجة، و
وجدوا وسائلاً جيدة لاختبار زاوية دوران الروبوت، و
يدركون العوامل التي قد تؤثر على دقة التوقف عند استخدام مستشعر الانعطاف (تفاوت المستشعر وفترة ركود المحرك والقوة الدافعة الدورانية).
وصِّل
(5 دقيقة.)
الانعطاف باستخدام العجلات ليس دقيقًا تمامًا. إذا جربت تدوير الروبوت في الغبار أو على سطح زلق، فإنه قد لا يصل إلى الزاوية المناسبة. ما يقوم به مستشعر الانعطاف هو مساعدتك على القيام بحركات أكثر دقة.
مهمتك هي برمجة الروبوت لإتمام انعطاف حول محوره إلى زاوية معينة باستخدام مستشعر الانعطاف.
أنشئ
(20 دقيقة.)
بناء الروبوت
انقر فوق الرابطين أدناه لفتح إرشادات البناء، ثم قم ببناء النموذج، وبعد ذلك ارجع إلى هذا المشروع للمتابعة. تخطى هذه الخطوة إذا كان النموذج مبنيًا مسبقًا.
ملاحظة مهمة:
أبق مستشعر الانعطاف ووحدة البناء EV3 في وضع الاستعداد عند توصيل الكبل وأثناء بدء تشغيل وحدة EV3.
إنشاء البرنامج
أعد إنشاء البرنامج المبين، ثم قم بتنزيله إلى الروبوت الخاص بك.

موجز البرنامج
بدء
خزان الحركة - الطاقة B[10]، الطاقة C[-10]
الانتظار - مستشعر الانعطاف -مقارنة -الزاوية - النوع[3] (أكبر من أو يساوي)، درجة [90]
خزان الحركة - إيقاف التشغيل
استكشاف الأخطاء وإصلاحها
يجب تعديل الزاوية – عادة ما يجب أن تكون القيمة أقل من 90 درجة.
نظرية
عند استخدام مستشعر الانعطاف، تتطابق قيمة الدوران المكتوبة في قالب المستشعر مع دوران قاعدة القيادة. تبلغ دقة المستشعر +/- 3 درجة.
يمكن أن تؤثر فترة ركود المحرك والتأخير الناتج عن إيقاف القوة الدافعة الدورانية على الدقة.
لم يعد مستوى طاقة البطارية وحجم العجلتين واحتكاك الروبوت على السطح والمسافة بين العجلتين ضمن العوامل التي يمكن أن تؤثر على دقة دوران الروبوت.
تأمل
(20 دقيقة.)
تشغيل البرنامج والملاحظة
ضع الروبوت الخاص بك في موضع البدء 2 على الخريطة 2، ثم قم بتشغيل البرنامج.
توثيق الاستنتاجات
صف هنا ما قام به كل قالب من قوالب البرمجة:
قام الروبوت بالانعطاف حول محوره إلى أن قرأ مستشعر الانعطاف القيمة 90 درجة، ثم توقف.
أعط تقديرك لزاوية دوران الروبوت:
دار الروبوت مقدار 90 درجة تقريبًا.
اشرح الاختلاف بين دوران الروبوت باستخدام مستشعر الانعطاف وبدونه:
يرتبط الدوران الذي يتم التحكم فيه باستخدام مستشعر الانعطاف بعدد قليل من العوامل التي تدعو إلى عدم اليقين على الروبوت.
التأمل وإدخال التعديلات
أعد بناء البرنامج لتزويد الروبوت بالقدرة على القيام بالانعطافات التالية حول محوره:
1- في اتجاه حركة عقارب الساعة مقدار 45 درجة.
2- في اتجاه حركة عقارب الساعة مقدار 180 درجة.
3- في اتجاه حركة عقارب الساعة مقدار 360 درجة يتبعه انعطاف حول المحور في عكس اتجاه حركة عقارب الساعة بمقدار 360 درجة
ما مقدار دوران الروبوت مقارنة بما أمره البرنامج أن يفعله؟
دار الروبوت إلى حدّ نموذجي مسافة أطول وذلك نتيجة القوة الدافعة الدورانية.
المهمة
أدر الروبوت في اتجاه حركة عقارب الساعة مقدار 45 درجة.

موجز البرنامج
بدء
خزان الحركة - الطاقة B[10]، الطاقة C[-10]
الانتظار - مستشعر الانعطاف -مقارنة -الزاوية - النوع[3] (أكبر من أو يساوي)، درجة [45]
خزان الحركة - إيقاف التشغيل
استكشاف الأخطاء وإصلاحها
يجب تعديل الزاوية – عادة ما يجب أن تكون القيمة أقل من 45 درجة.
المهمة
أدر الروبوت في اتجاه حركة عقارب الساعة مقدار 180 درجة.

موجز البرنامج
خزان الحركة - الطاقة B[10]، الطاقة C[-10]
الانتظار - مستشعر الانعطاف -مقارنة -الزاوية - النوع[3] (أكبر من أو يساوي)، درجة [180]
خزان الحركة - إيقاف التشغيل
استكشاف الأخطاء وإصلاحها
يجب تعديل الزاوية – عادة ما يجب أن تكون القيمة أقل من 180 درجة.
المهمة
أدر الروبوت في اتجاه حركة عقارب الساعة مقدار 360 درجة واتبعها بانعطاف حول المحور في عكس اتجاه حركة عقارب الساعة بمقدار 360 درجة.

موجز البرنامج
بدء
خزان الحركة - الطاقة B[10]، الطاقة C[-10]
الانتظار - مستشعر الانعطاف -مقارنة -الزاوية - النوع[3] (أكبر من أو يساوي)، درجة [360]
خزان الحركة - إيقاف التشغيل
الانتظار - ثانية[2]
خزان الحركة - الطاقة B[10]، الطاقة C[-10]
الانتظار - مستشعر الانعطاف -مقارنة -الزاوية - النوع[3] (أقل من أو يساوي)، درجة [360]
خزان الحركة - إيقاف التشغيل
استمر
(15 دقيقة.)
متابعة الاستكشاف
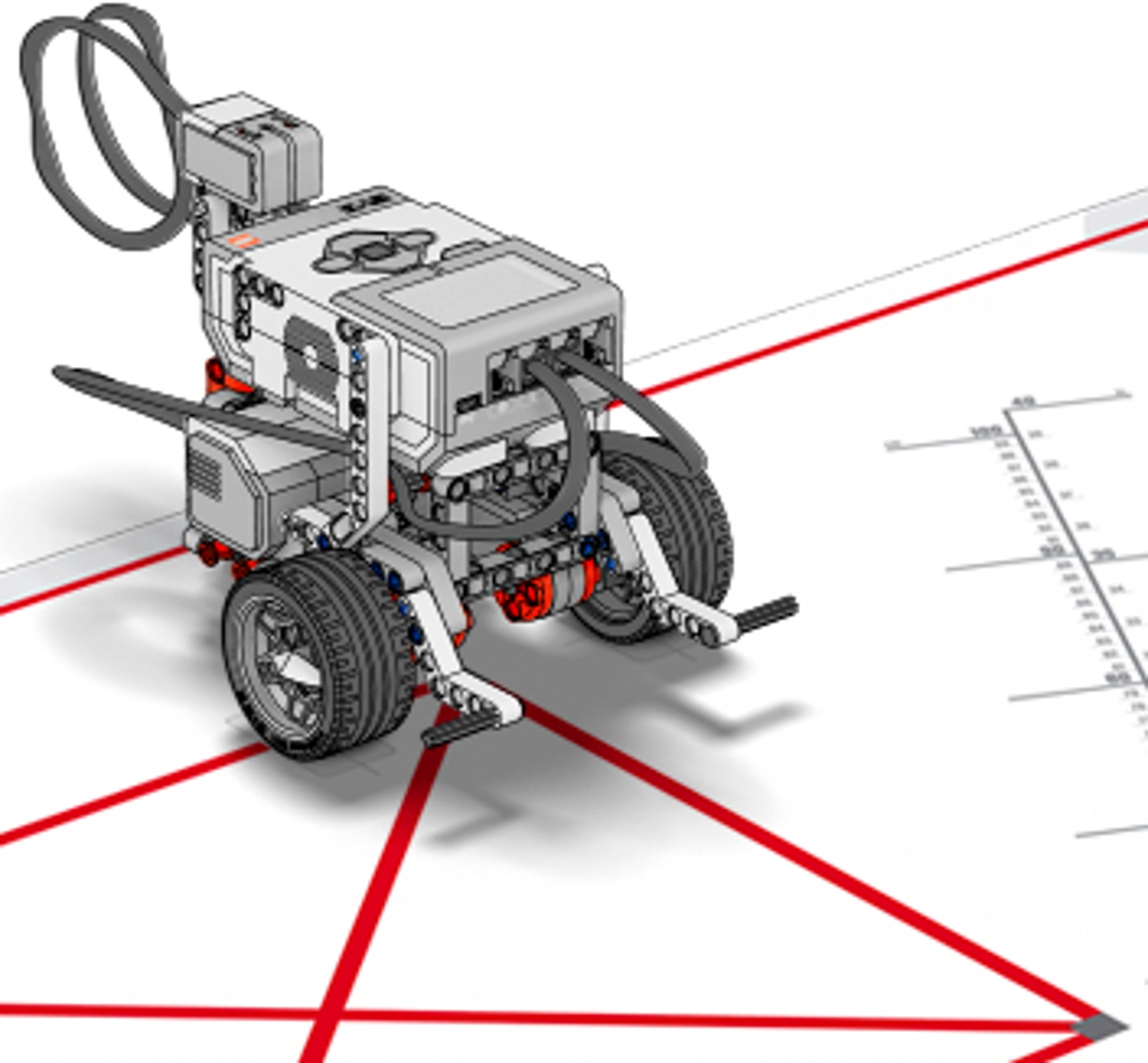
قم بإنشاء برنامج جديد باستخدام أحد قوالب "الحركة الحلقية" لجعل الروبوت يتحرك في شكل مربع.
عندما تصبح مستعدًا، اختبر البرنامج على موضع البدء 4 على خريطة التعلم 1.

موجز البرنامج
بدء
الحركة الحلقية - العدد[4]
نقل التوجيه - درجة [682]، الطاقة[30]
الانتظار - الوقت[1 ثانية]
خزان الحركة - تشغيل، الطاقة B[10]، الطاقة C[-10]
الانتظار - مستشعر الانعطاف - تغيير - الزاوية – الاتجاه[0] (زيادة)، درجة [85]
خزان الحركة - إيقاف التشغيل
الانتظار - الوقت[1 ثانية]
استكشاف الأخطاء وإصلاحها
يجب تعديل الزاوية – عادة ما يجب أن تكون القيمة أقل من 90 درجة.
اشرح هنا الغرض الذي تُستخدم لأجله الحركة الحلقية:
يمكنني استخدام بنية الحركة الحلقية لتكرار الإجراءات.
اختياري
المهمة1
قم بإنشاء برنامج جديد يجعل الروبوت يتحرك في شكل مثلث.
عندما تصبح مستعدًا، اختبر البرنامج في الموضع 4 على الخريطة 1.
المهمة 2
قم ببرمجة الروبوت لجعله يتحرك في أشكال أخرى.

أنت الآن قادر على استخدام مستشعر الانعطاف للقيام بانعطافات. أحسنت!
دعم المعلم
سيتعلم الطلاب ما يلي:
العلوم والهندسة
• الأنماط
• السبب والنتيجة: الآلية والتفسير
الرياضيات:
• حل المشكلات الواقعية والحسابية المرتبطة بقياسات الزوايا والمساحة ومساحة السطح والحجم
• البحث عن الدقة وتحريها في الاستنتاجات المتكررة
تعلم علم الروبوتات:
• التحكم في حركة الروبوت باستخدام مستشعر الانعطاف
• إدراك الاختلاف بين برمجة المخرجات العادية والبرمجة القائمة على المستشعرات
• أوجه الاستفادة من المستشعرات وأوجه قصورها
مجموعة LEGO MINDSTORMS EV3 الأساسية
مختبر EV3 أو برنامج EV3
مجموعة تحدي الفضاء EV3