Make a Factory Conveyor
Design, build, and program a robotic system that relies on at least one motor and one sensor to move a ball on a path that includes a 90-degree turn.

Lesson plan
Prepare
- Read through this teacher material.
- If you feel it is needed, plan a lesson using the getting started material in the EV3 Lab Software or EV3 Programming app. This will help familiarize your students with LEGO® MINDSTORMS® Education EV3.
Engage (30 Min.)
- Use the ideas in the Ignite a Discussion section below to engage your students in a discussion related to this project.
- Explain the project.
- Split your class into teams of two students.
- Allow your students some time to brainstorm.
Explore (30 Min.)
- Have your students create multiple prototypes.
- Encourage them to explore both building and programming.
- Have each pair of students build and test two solutions.
Explain (60 Min.)
- Ask your students to test their solutions and to choose the best one.
- Make sure they can create their own testing tables.
- Allow some time for each team to finalize their project and to collect assets for documenting their work.
Elaborate (60 Min.)
- Give your students some time to produce their final reports.
- Facilitate a sharing session in which each team presents their results.
Evaluate
- Give feedback on each student’s performance.
- You can use the assessment rubrics provided to simplify the process.
Ignite a Discussion
Factory conveyors transport things ranging from raw materials to finished and packaged products between different locations. The belt conveyor is most well-known, but a wide variety of conveyor systems have been developed to move all kinds of objects efficiently.

Encourage an active brainstorming process.
Ask your students to think about these questions:
- What is a factory conveyor and where is it used?
- Which type of motorized mechanism can be used to move a ball?
- How can the robotic system move the ball while maintaining control of the ball?
- What role does your sensor play? How can you measure how well your robotic system works?
Encourage students to document their initial ideas and explain why they picked the solution they will use for their first prototype. Ask them to describe how they will evaluate their ideas throughout the project. That way, when they are reviewing and revising, they will have specific information they can use to evaluate their solution and decide whether or not it was effective.
Language Arts Extension
To incorporate language arts skills development, have your students:
- Use their written work, sketches, and/or photos to summarize their design process and create a final report.
- Create a video demonstrating their design process starting with their initial ideas and ending with their completed project.
- Create a presentation about their program.
- Create a presentation that connects their project with real-world applications of similar systems and describes new inventions that could be made based on what they have created.
Building Tips
Building Ideas
Give your students an opportunity to build some examples from the links below. Encourage them to explore how these systems work and to brainstorm how these systems could inspire a solution to the Design Brief.
Testing Tips
Encourage your students to design their own test setup and procedure to select the best solution. These tips can help your students as they set up their test:
- Create testing tables to record your observations.
- Evaluate the precision of your robotic system by comparing the expected results with the actual results.
- Repeat the test at least three times.
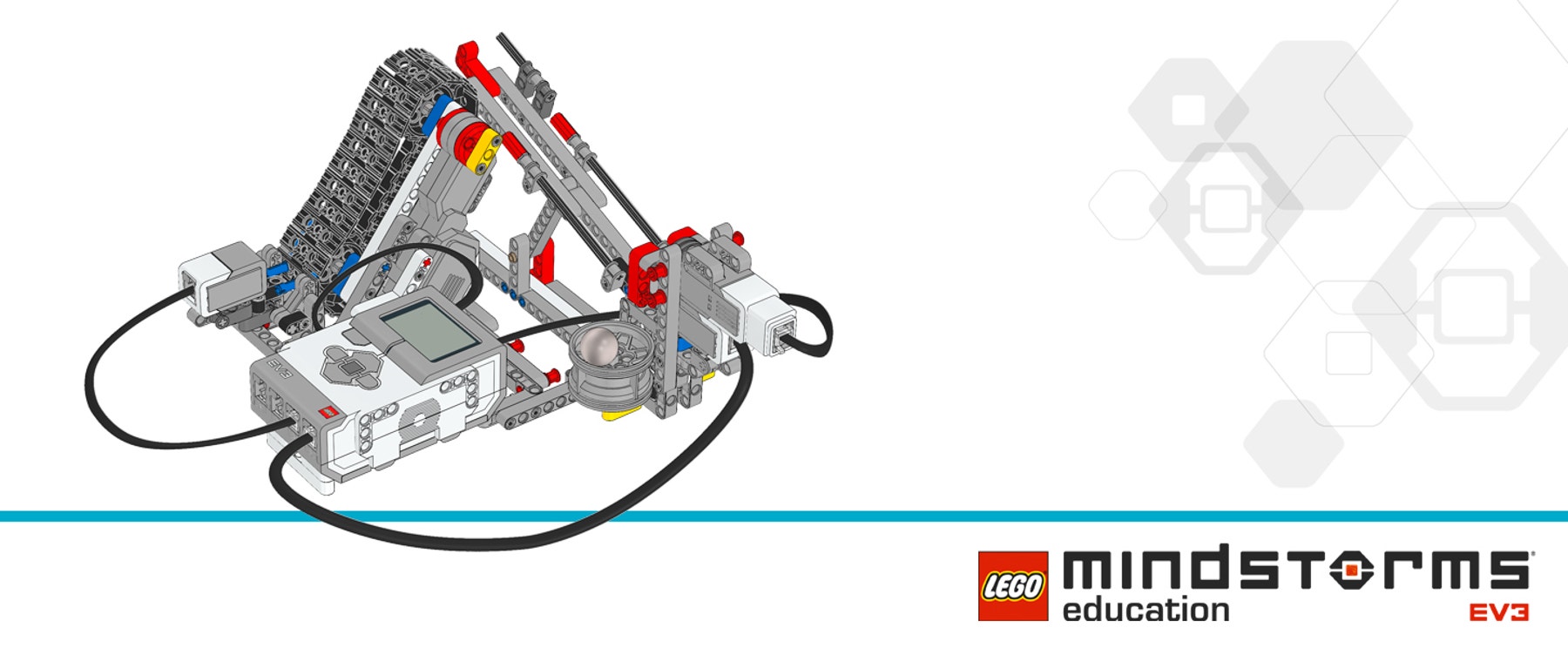
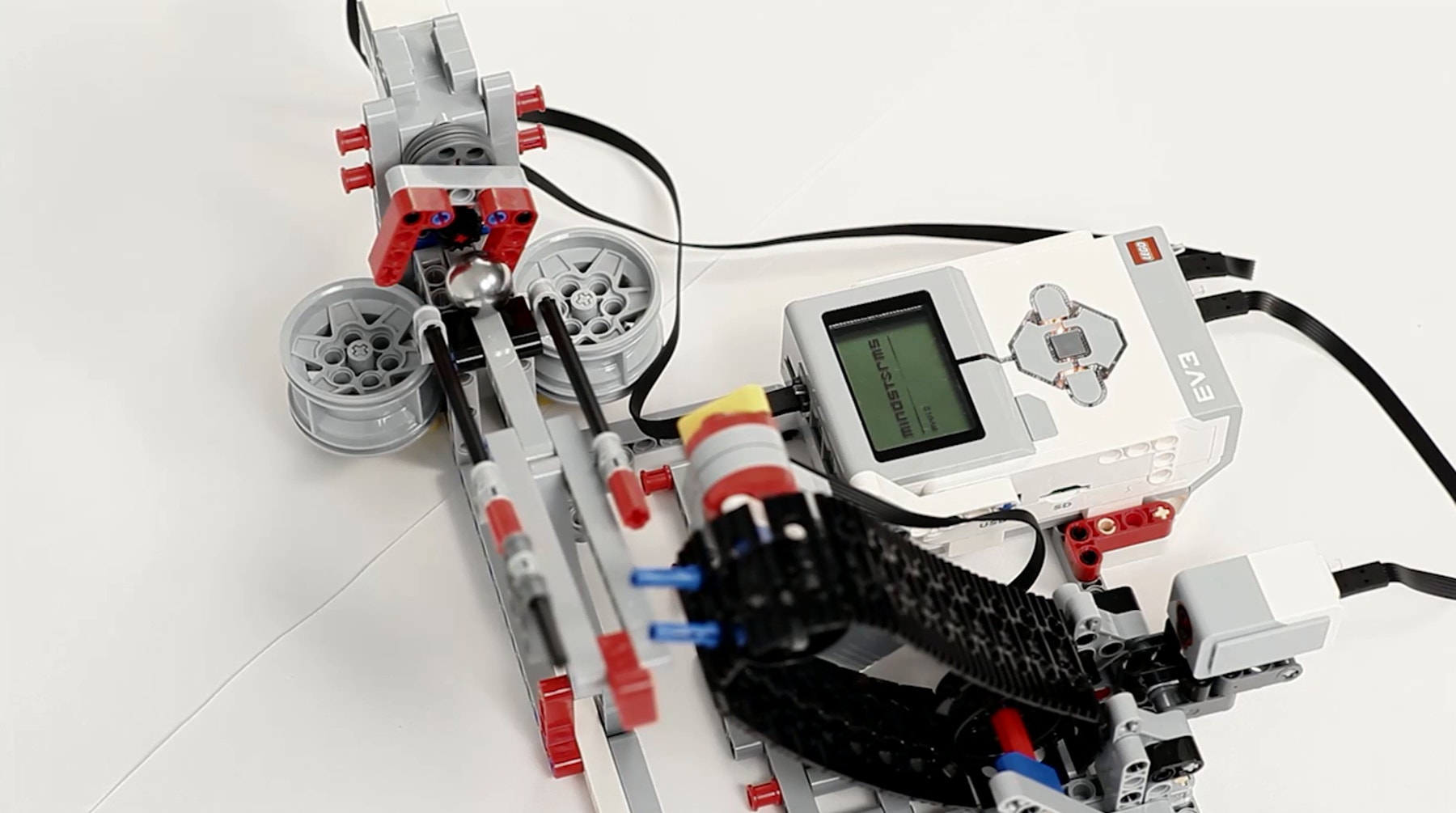
Sample Solution
Here is a sample solution that meets the Design Brief criteria:
Coding Tips
EV3 MicroPython Sample Program
#!/usr/bin/env pybricks-micropython
from pybricks import ev3brick as brick
from pybricks.ev3devices import Motor, TouchSensor, ColorSensor
from pybricks.parameters import Port, Stop, Direction, SoundFile
from pybricks.tools import wait
from random import randint
# Configure the belt motor, which drives the conveyor belt. Set the
# motor direction to counterclockwise, so that positive speed values
# make the conveyor move upward.
belt_motor = Motor(Port.A, Direction.COUNTERCLOCKWISE)
# Configure the "catch" motor with default settings. This motor moves
# the ball to either cup.
catch_motor = Motor(Port.D)
# Set up the Color Sensor. It is used in Reflected Light Intensity
# Mode to detect when the ball is placed at the bottom of the conveyor
# belt.
color_sensor = ColorSensor(Port.S3)
# Set up the Touch Sensor. It is used to detect when the ball reaches
# the catch at the end of the ramp.
touch_sensor = TouchSensor(Port.S4)
# Initialize the conveyor belt. This is done by slowly running the
# motor backward until it stalls. This means that it cannot move any
# further. Then it resets the angle to "0." This means that when it
# rotates backward to "0" later on, it returns to this starting
# position.
belt_motor.run_until_stalled(-300, Stop.BRAKE, 30)
belt_motor.reset_angle(0)
# This is the main part of the program. It is a loop that repeats
# endlessly.
#
# First, it waits until the ball is placed on the conveyor belt.
# Second, the ball is moved upward until it reaches the ramp where it
# rolls down to the catch.
# Finally, the ball is moved to the left or the right cup, or an error
# sound is made, chosen at random.
#
# Then the process starts over. The ball can be placed at the
# beginning of the conveyor belt again.
while True:
# Wait until the ball is placed in front of the Color Sensor.
while color_sensor.reflection() < 5:
wait(10)
wait(500)
# Move the ball up on the conveyor belt.
belt_motor.run_target(250, 450, Stop.COAST, False)
# Wait until the ball hits the Touch Sensor at the catch at the end
# of the ramp.
while not touch_sensor.pressed():
wait(10)
# Generate a random integer between "-1" and "1" to determine what
# to do with the ball.
catch_command = randint(-1, 1)
# If it generates a "1," change the light to green and move the
# ball to the right cup.
if catch_command == 1:
brick.light(Color.GREEN)
catch_motor.run_target(400, -20)
wait(1000)
catch_motor.run_target(400, 0, Stop.HOLD)
# If it generates a "0," change the light to orange and move the
# ball to the left cup.
elif catch_command == 0:
brick.light(Color.ORANGE)
catch_motor.run_target(400, 20)
wait(1000)
catch_motor.run_target(400, 0, Stop.HOLD)
# Otherwise, change the light to red and play an error sound.
else:
brick.light(Color.RED)
brick.sound.file(SoundFile.RATCHET)
wait(1000)
Career Links
Students who enjoyed this lesson might be interested in exploring these careers pathways:
- Manufacturing and Engineering (Machine Technology)
- Science, Technology, Engineering & Mathematics (Engineering and Technology)
Assessment Opportunities
Teacher Observation Checklist
Create a scale that matches your needs, for example:
- Partially accomplished
- Fully accomplished
- Overachieved
Use the following success criteria to evaluate your students’ progress:
- Students can evaluate competing design solutions based on prioritized criteria and tradeoff considerations.
- Students are autonomous in developing a working and creative solution.
- Students can clearly communicate their ideas.
Self Assessment
Once your students have collected some performance data, give them time to reflect on their solutions. Help them by asking questions, like:
- Is your solution meeting the Design Brief criteria?
- Can your robotic system’s movement(s) be made more accurate?
- What are some ways that others have solved this problem?
Ask your students to brainstorm and document two ways they could improve their solutions.
Peer Feedback
Encourage a peer review process in which each group is responsible for evaluating their own and others’ projects. This review process can help students develop skills in giving constructive feedback as well as sharpen their analysis skills and ability to use objective data to support an argument.
Teacher Support
Students will:
-Use the design process to solve a real-world problem




