Stop at Line
Use the Colour Sensor to stop the Driving Base when a line is detected.
Test It
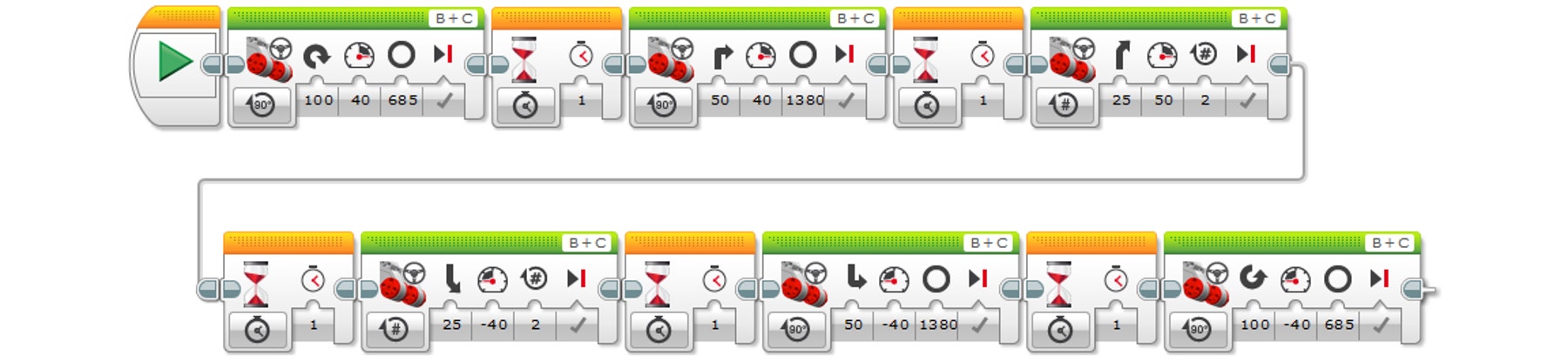
Recreate the program shown below, then download and run to test. Set the sensor threshold for best results.
Hints
For best results, ensure the dark line is at least 20% darker than the surrounding surface. The line may not be detected if the Driving Base turns too quickly.

Program Summary
Start
Large Motor - On
Wait - Colour Sensor – Compare Reflected Light Intensity[Less Than, 50]
Large Motor - Off
Modify It
Now it’s your turn! See if you can make the Colour Sensor detect a lighter-coloured line.
Hints
If the difference between the x and y values is too small, the line will not be detected. If this occurs, try recalibrating the sensor.
What is next?

Teacher Support
Students will:
Use the Colour Sensor to stop the Driving Base when a line is detected.
LEGO® MINDSTORMS Education EV3 Core Set
EV3 Software or Programming App




