Make a System That Picks and Places
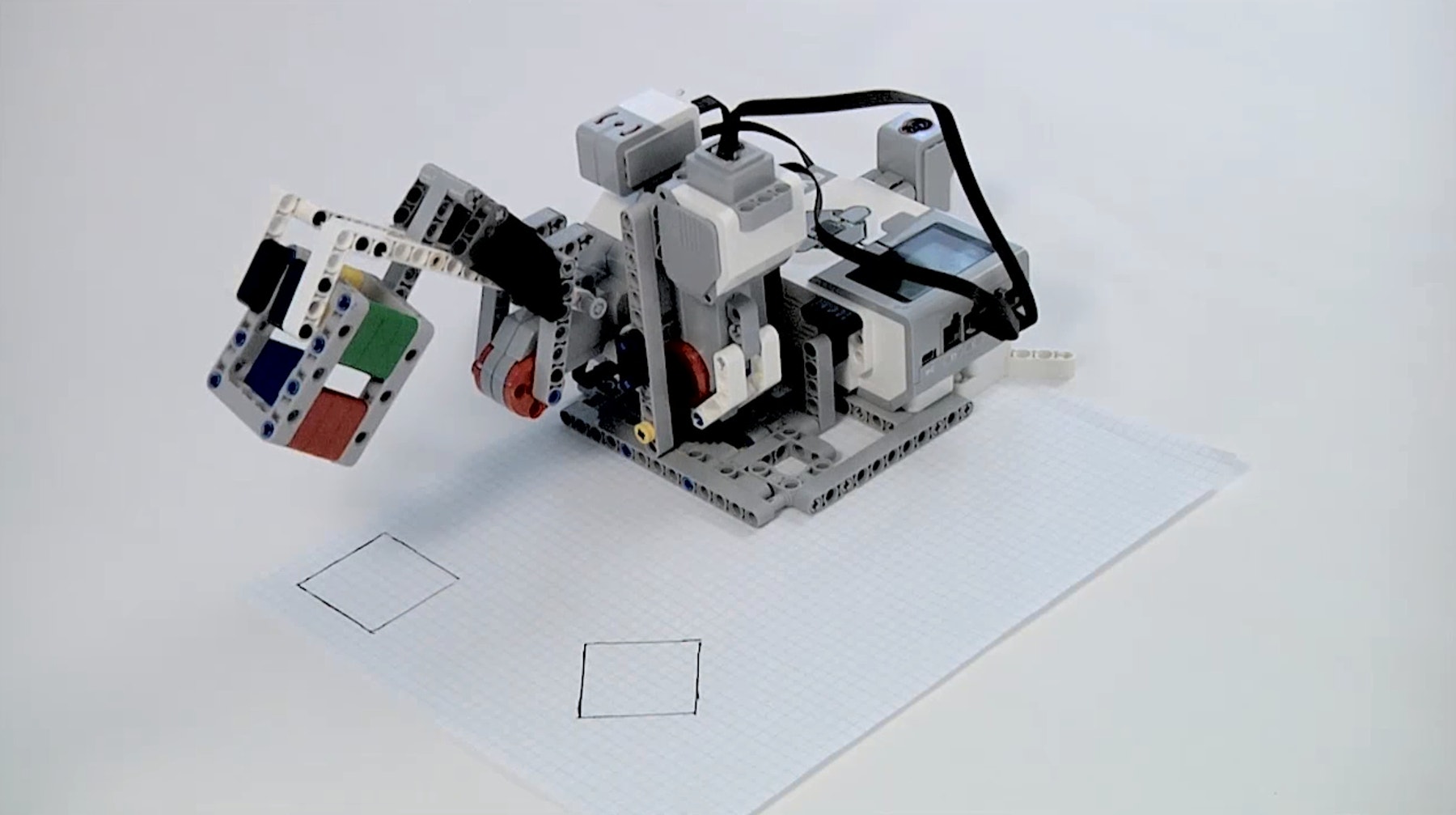
Design, build and program a robotic system that can pick up the Cuboid from one location and place it in another location.

Connect
(30 minutes)

Use this video to:
- Connect students to real-life robotic systems
- Consider how robotic systems are made up of smaller subsystems
- Inspire students to create their own robotic systems
Make a System Discussion
- Robotic systems are built from smaller, related subsystems. Look at the automobile system shown in the video. What subsystems can you see?
Answers can vary but may include describing the automobile manufacturing system with one subsystem for moving the car into position and multiple robotic subsystems welding components on different parts of the car. - What other systems and subsystems do you see in the video?
Answers may vary but may include describing the box-sorting conveyor system that separates boxes of different sizes. This system has two conveyor lines: one for larger boxes and one for smaller boxes. There is also a more complex sorting system that manages a larger volume of boxes and many more possible locations using multiple sorting arms and conveyors.
Design Brief
Design, build, and program a robotic system that can pick up the Cuboid from one location and place it in another location.
Brainstorm
Encourage an active brainstorming process so that students develop their conceptual understanding. For example, encourage them to:
- Review the Robots In Action videos showing robots for inspiration
- Investigate Key Concepts Systems and Subsystems
- Build some of the examples from Building Ideas and explore how they work
- Personalize their robot or describe a context in which a robot moves other objects (e.g., robot arm and other robots in the Logistics video).
Building Ideas:
Select the Best Solution
Describe the solution that you have agreed to build and program.
Think about examples from your brainstorming discussion. Then explain why you chose this solution for the design brief. Encourage students to describe why they have chosen this solution. That way, when students are reviewing and revising, they will have specific information to use to evaluate their solution and decide whether or not it was effective.
Construct
(30 minutes)
Build and Program
Start building and programming your solution!
As you work on your solution, make sure students keep track of:
- Describe one part of your design that worked especially well.
- Describe one design change that you had to make.
- What will you try next?
Students can use images, video, text, sound, or weblinks to document their work.
Test Set Up and Procedure
Materials needed: Large sheet of graph paper or paper with gridlines, colored pencils (3 or more different colors).
- Lay down your paper with 1 cm x 1 cm gridlines on a flat surface.
- Position your robot on the paper and mark the edges so you can keep it in the same position.
- Next, mark the location (e.g., color the squares on your graph paper) to show where the robot should position the Cuboid. Make a dot to show the center of that expected location.
- Run your program.
- Mark the location in a different color to show where the robot actually placed the Cuboid. Make a dot to show the center of the actual location. How far away from the expected location is the actual location?
- Repeat at least three times.
Depending on the students’ skill level, they can use Cartesian coordinates to indicate the expected and actual coordinates (e.g., Expected (x, y) Actual (x1-5, y1-2)). You could even challenge students to identify a Cartesian system on the graph paper and get very specific describing the range of motion, depending on the type of robot that they students created.
Contemplate
(30 minutes)
Test and Analyze
How well does your solution satisfy the design brief?
Use a table to record data. Name the columns and rows, such as Trial Number, Expected position, Actual position, Difference and Changes.
Review and Revise
Take a moment to reflect on your robot solution.
- Can the robot movement be made more accurate?
- What are some ways that others have solved the problem?
Encourage students to look back at the design brief and at their own brainstorming notes and test data. Encourage a peer-review process so that each group is responsible for evaluating their own and others’ projects. This review process can help students develop skills in giving constructive feedback as well as sharpening analysis skills and the use of objective data to support an argument.
Communicate
Here are some ideas to suggest to students:
- Create a video of your project, especially your final presentation and your robot’s performance.
- Explain some important features of your software program.
- Produce a building guide for your model by taking a series of photographs as you deconstruct it.
- Include an image of your program with comments.
- Add a team photograph
Evaluate Design and NGSS Goals
You can use the included rubrics to evaluate skills progression of Design Engineering Projects.
- Students can review their design goals as well as their use of some NGSS practices using the provided rubric. Students can rate their level of work by adding a mark below the Bronze, Silver, Gold, or Platinum column.
- You may also choose to use the rubric to rate each team or student yourself.
Evaluate Creativity and Collaboration
Students can review their creative and collaboration processes using the provided rubric.
You may also choose to use the rubric to rate each team or student yourself.
Continue
(30 minutes)
Communicate
Here are some ideas to suggest to students:
- Create a video of your project, especially your final presentation and your robot’s performance.
- Explain some important features of your software program.
- Produce a building guide for your model by taking a series of photographs as you deconstruct it.
- Include an image of your program with comments.
- Add a team photograph
Evaluate Design and NGSS Goals
You can use the included rubrics to evaluate skills progression of Design Engineering Projects.
- Students can review their design goals as well as their use of some NGSS practices using the provided rubric. Students can rate their level of work by adding a mark below the Bronze, Silver, Gold, or Platinum column.
- You may also choose to use the rubric to rate each team or student yourself.
Evaluate Creativity and Collaboration
Students can review their creative and collaboration processes using the provided rubric.
You may also choose to use the rubric to rate each team or student yourself.
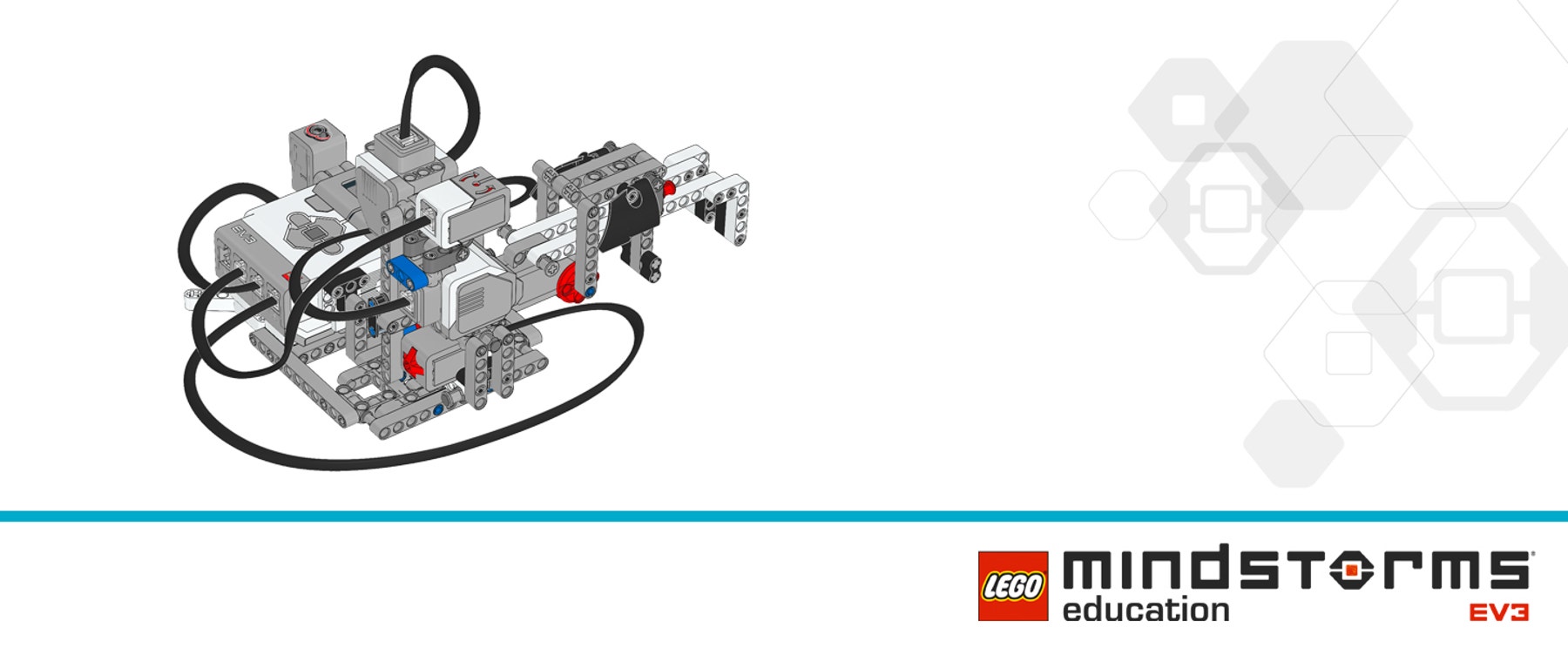
Sample Solution Overview
The Pick and Place Solution is one example of many possible solutions for the Make a System That Picks and Places project.
Sample Solution Building Ideas
Pick and Place combines these Building Ideas: Cuboid, Color Sensor 2, Grabber, Gyro Sensor, Touch Sensor, and Turntable.
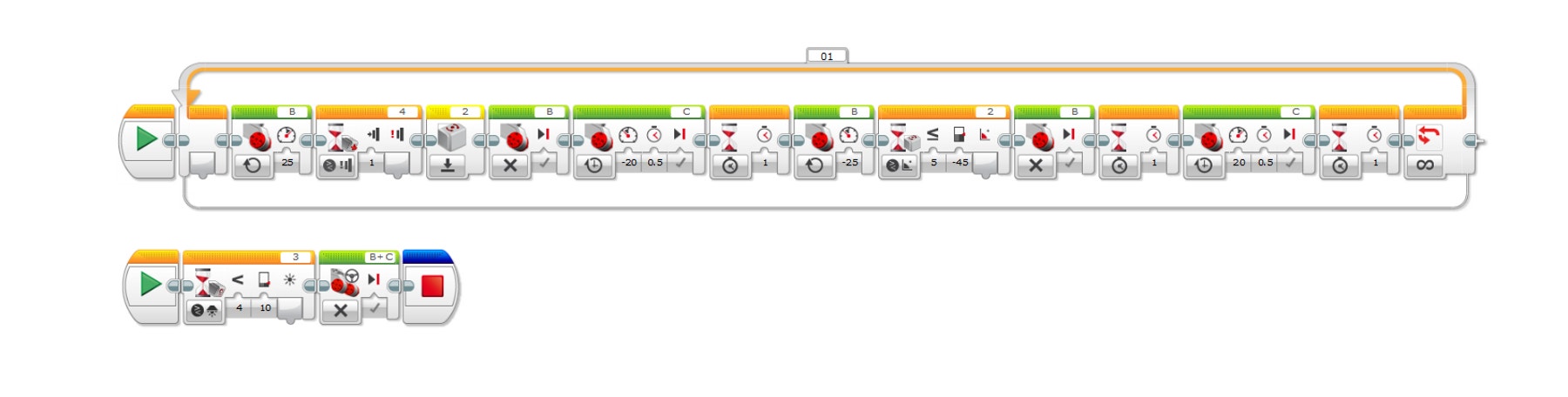
Sample Solution Program
There are two tasks in this program.
This first program task:
- Turns on Turntable Motor B to move the arm back into position
- Waits until the Touch Sensor is pressed
- Resets the Gyro Sensor
- Turns on Grabber Motor C for 0.5 seconds so it closes to grab the Cuboid
- Waits 1 second
- Turns on Turntable Motor B at 25% power and turns to the left
- Waits until the Gyro Sensor measures -45°
- Turns off Turntable Motor B
- Waits for 1 second
- Turns on Grabber Motor C for 0.5 seconds so it opens to release the Cuboid
- Waits 1 second
- Loops an unlimited number of times
This second program task:
- Waits until the Color Sensor is activated (e.g., by a person’s hand)
- Stops both Motors as a safety precaution
- Stops the program
Multitasking is the term for more than one program task running concurrently.
Teacher Support
Students will:
• Understand that larger systems can be made from smaller systems or subsystems
• Understand that sensor data can control systems using feedback
• Understand that pick-and-place robots are examples of production technology
• Write a program to control picking up the Cuboid, moving it and placing it in another location
LEGO® MINDSTORMS Education EV3 Core Set
LEGO® MINDSTORMS Education EV3 Lab or EV3 Programming
Prerequisites
Students should know how to create and download a program, and how to program a motor.
Common Core Science
Practices
1.1, 1.2, 1.3, 1.6, 1.8
Cross-cutting Concepts
2.4
Core Ideas: Engineering, Technology and Application of Science
3.ETS.1
Common Core Mathematics
Practices
1.1, 1.2, 1.4, 1.5, 1.6
ITEEA Standards for Technological Literacy
Design
8, 9, 10
Abilities for a Technological World
11, 13
The Designed World
16
ISTE National Education Technology Standards
1a, 1b, 1c, 2b, 2d, 3a, 3d, 4a, 4b, 4c, 6a, 6c, 6d




