Dogbot
Explore the scientific concepts of levers, linkages, pulleys, mechanical programming, force and friction.

Connect
(5-10 Minutes)
Zog is very bored. He dreams of a special friend that is always happy, wide awake and with whom he can share a bone. Jack and Jill have an idea.
How can we make an exciting friend for Zog to play with?
Let’s find out.
Construct
(20-25 Minutes)
Build a Dogbot
(all of book 14A and book 14B to page 19, step 27)
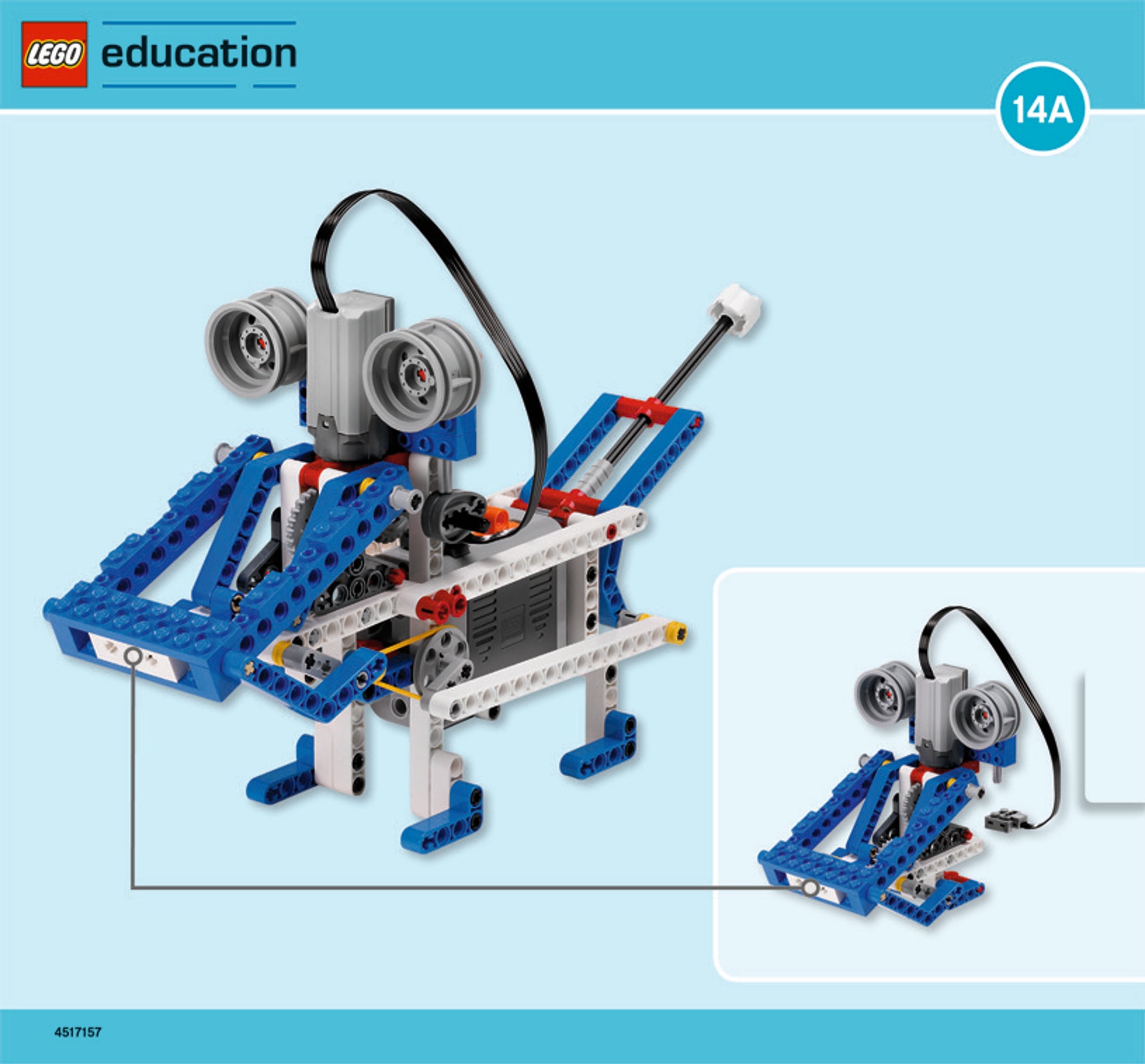
There are many moving parts on the dogbot, but only one motor. Turn on the dogbot by pushing backward on the battery switch. If the motor is not
turning freely, you need to check several parts of the dogbot:
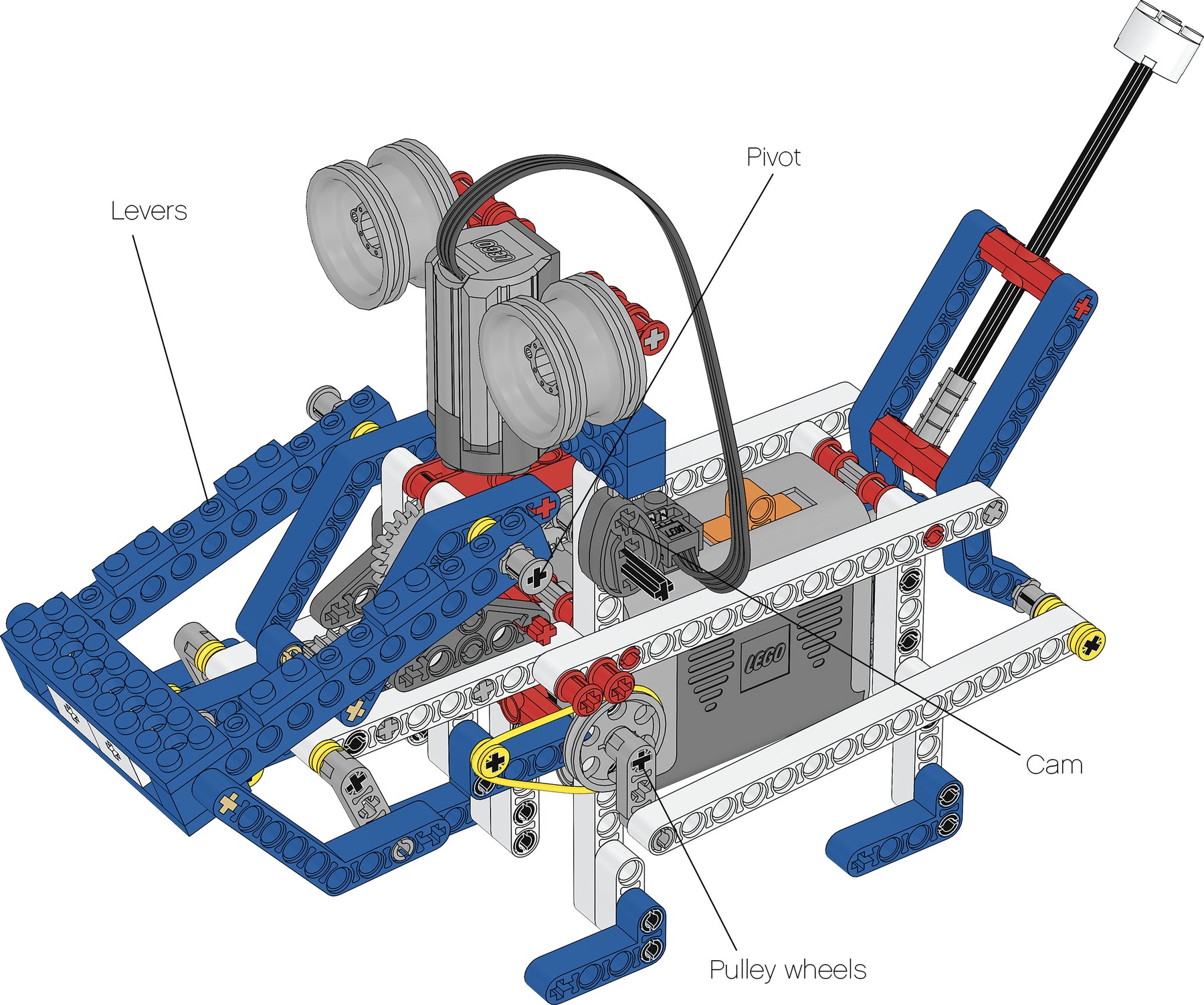
The lever on the upper jaw should move up and down
The cams should rotate freely, moving the eyes attached to the axles up and down
The lever on the tail should wag up and down
Did you know?
The jaw and tail movements both feature compound levers with several pivots.
Contemplate
(20-25 minutes)
Is the dogbot wide awake?
When the dogbot is wide awake its eyes move about a lot!
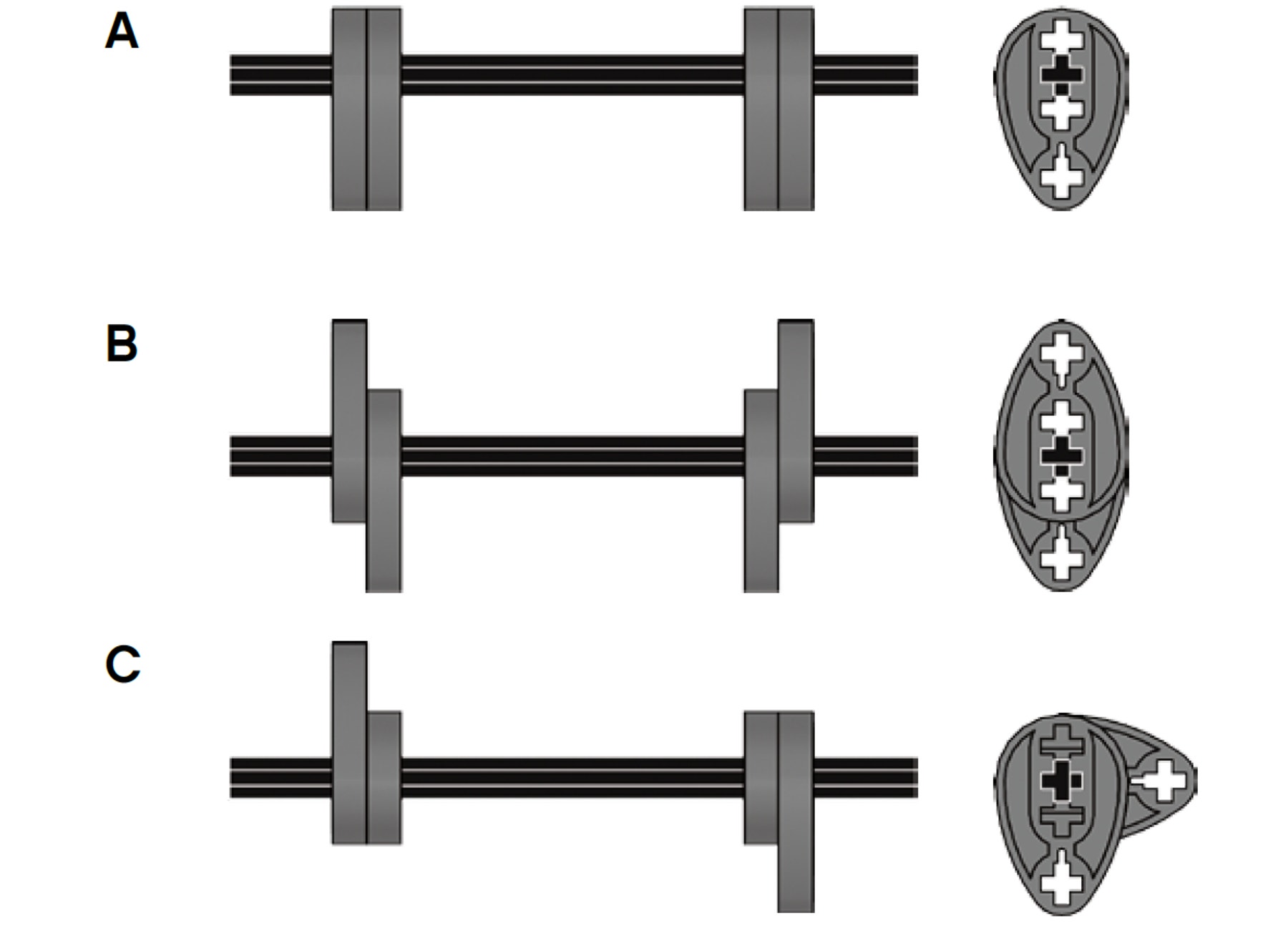
Which cam setting will produce a sleepy, awake and wide awake dogbot?
Predict first which eye action cam setting A will produce. Then test your prediction. Next, follow the same procedure for cam settings B and C.
Cam setting A (page 19, step 27) results in a sleepy dogbot, i.e. only one eye bounce per turn of the cam.
Cam setting B (page 20, step 28) results in a dogbot that is awake, i.e. the eyes bounce twice per turn but at regular intervals.
Cam setting C (page 21, step 29) gives us a dogbot who is wide awake, i.e. the eyes bounce twice per turn but at irregular intervals – one eye is up when the other is down!
Did you know?
Cams work inside car engines, clocks, toys, sewing machines, and locks – in fact anywhere complex, timed actions are required.
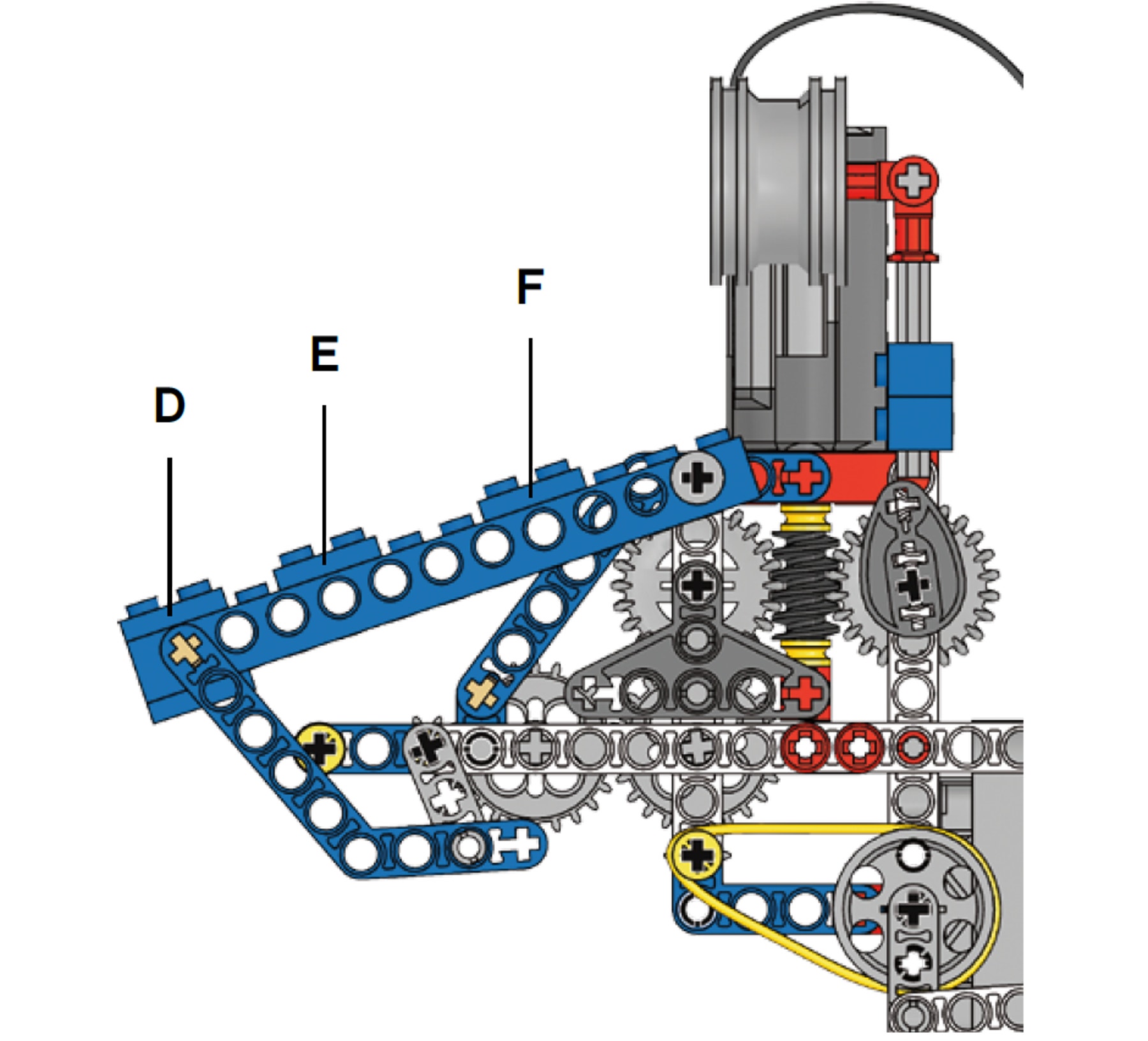
How wide can the dogbot’s jaws open?
By changing the peg position you can change the extent to which the dogbot can open its jaws.
First predict how wide peg position D will make the dogbot’s jaws open. Then test your prediction. Next, follow the same procedure for peg positions E and F.
Position D (page 22, step 30) allows the dogbot to open its jaws wide.
Position E (page 23, step 31) means the dogbot can open its jaws even wider.
Position F (page 24, step 32) is the widest possible setting for the dogbot’s jaws.
The closer the peg position is to the pivot, the wider the jaws open. The upper jaw is a 3rd class lever.
Did you know?
Your lower jaw is a lever. Feel where the muscle connects to the bone of the lower jaw. Your jaws are 3rd class levers just like the dogbot – just upside down!
Continue
(25-30 Minutes)
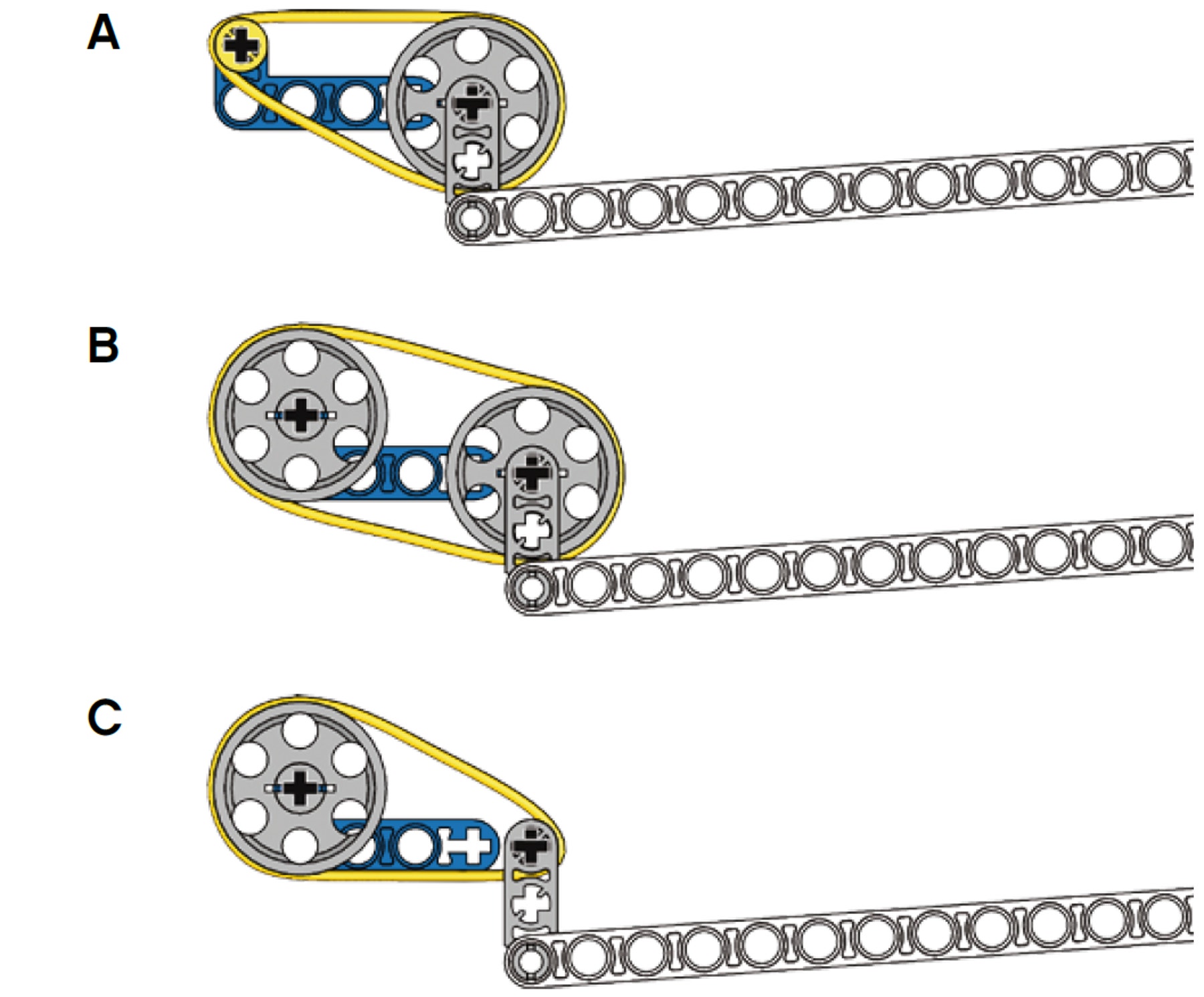
Can the dogbot be happier?
The dogbot wags its tail when it’s happy. The faster the wag, the happier it is.
First predict how happy the dogbot is using pulley setting A. Then test your prediction.
Next, follow the same procedure with pulley settings B and C.
Pulley setting A results in a slow wag, i.e. a happy dogbot.
Pulley setting B results in a faster wag – in fact three times faster than pulley setting A. The dogbot is now even happier.
Pulley setting C gives the fastest wag – three times faster than pulley setting B. This is the happiest the dogbot can be!
Teacher Support
Students will explore the concepts of:
Designing mechanical toys
Levers and linkages
Mechanical programming of actions
Pulleys and gearing
Using and combining components
Force and energy
Friction
Scientific investigation
9686 Simple & Powered Machines Set (two students per set recommended)
Crayons
Decorative materials: wool, foil, card, paper, etc.
Scissors
Sticky tape
NGSS
Crosscutting Concepts
Patterns
Science and Engineering Practices
Developing and using models
Planning and carrying out investigations
Common Core Mathematics Standards
7.RP.A / 6.NS.B / 6.EE.C / 7.EE.B / 8.EE.B / 8.F.B / 6.SP.A
Common Core English Language Arts
SL 6.1 / 6.2 / 7.1 / 7.4 / 8.1
RST 6-8.3 / 6-8.4 / 6-8.7
WHST 6-8.1 / 6-8.7 / 6-8.8 / 6-8.9
Student Material
Share with:
 Google Classroom
Google Classroom



