トライアル&エラー
合格レベルは?
完璧な機械というものは存在しません。できる限り正確で精度の高い機械になるようエンジニアが最善を尽くしても、必ずある程度の誤差が生じてしまいます。
誤差の許容範囲はどのような要素で決まるのでしょうか?
この*ベベルボット*を組み立てましょう。
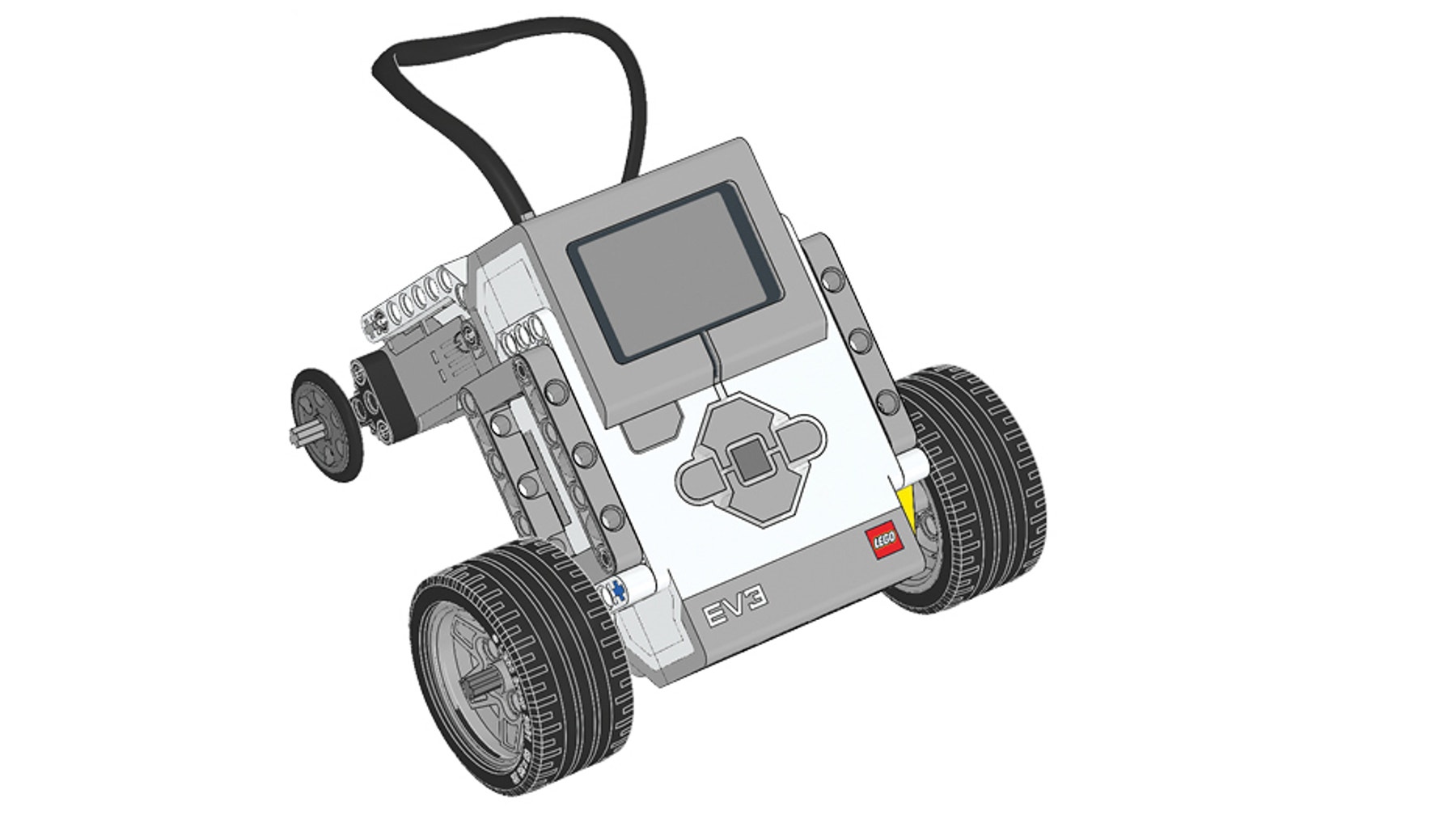
ロボットのデザインとプログラムにおいて、何が正確度や精度の低さの原因となるのかを調査するのに使います。
テスト走行をしましょう。


モデルを水平で安定した場所に置き、スターティングポジションに印をつけます。プログラムを実行し、ロボットが止まったら停止位置に印をつけます。
*ベベルボット*は100 cm前進しますか?算出されたモーター回転数と実際のモーター回転数、算出された移動距離 (cm) が表示されていますか?
結果を記録しましょう。

実験の回数、算出された移動距離、測定された実際の移動距離をチェック表に記録します。そのほかの計算ができるよう、列を追加できるスペースを確保しておきます。
基本モデルとプログラムを使用して実験を行います。調整を行うごとに実験を行い、その効果を確かめてください。
実験を行う
実験を行う際は、以下のヒントに従うと上手くいきます:
- 算出されたモーター回転数と実際のモーター回転数、算出された移動距離 (cm) がディスプレイに表示されます。
- 実験を3回以上行い、平均値を用いることで実験結果の信頼性を高めます。
結果をまとめましょう。

各調整後に測定した移動距離の平均値を用いて誤差を計算し、どの回が最も精度が高かったかを判断します。
ロボットのデザインやプログラムに行った調整のうち、精度に最も大きな影響をおよぼしたものはどれですか?
どうでしたか?

うまくできたのはどれですか?もっとうまくできたかもしれないことはありますか?
よくできました!これで、ロボットの精度を向上させる方法を学ぶことができました。それでは次のレッスンに進みましょう。