色と線
カラーセンサーを使って線を検出し、線に沿って走行します。

レッスンプラン
1.準備
- EV3 Classroom アプリの生徒用資料を読み、学習課題をよく理解しておきましょう。
- カラーセンサーが動く仕組みと、色モードと反射光の強さモードの使い方について調べておきます。
- このレッスンでは、太い黒い線を描くのに黒の粘着テープが必要です。
- このレッスンを完了するには、ドライビングベースを組み立てておく必要があります (所要時間約30分)。
2.興味付け (5分)
- 「ディスカッションを活性化させる」セクションのアイデアを参考に、生徒の学習への関心を喚起します。
- 生徒にペアを組ませます。
3.探求 (20分)
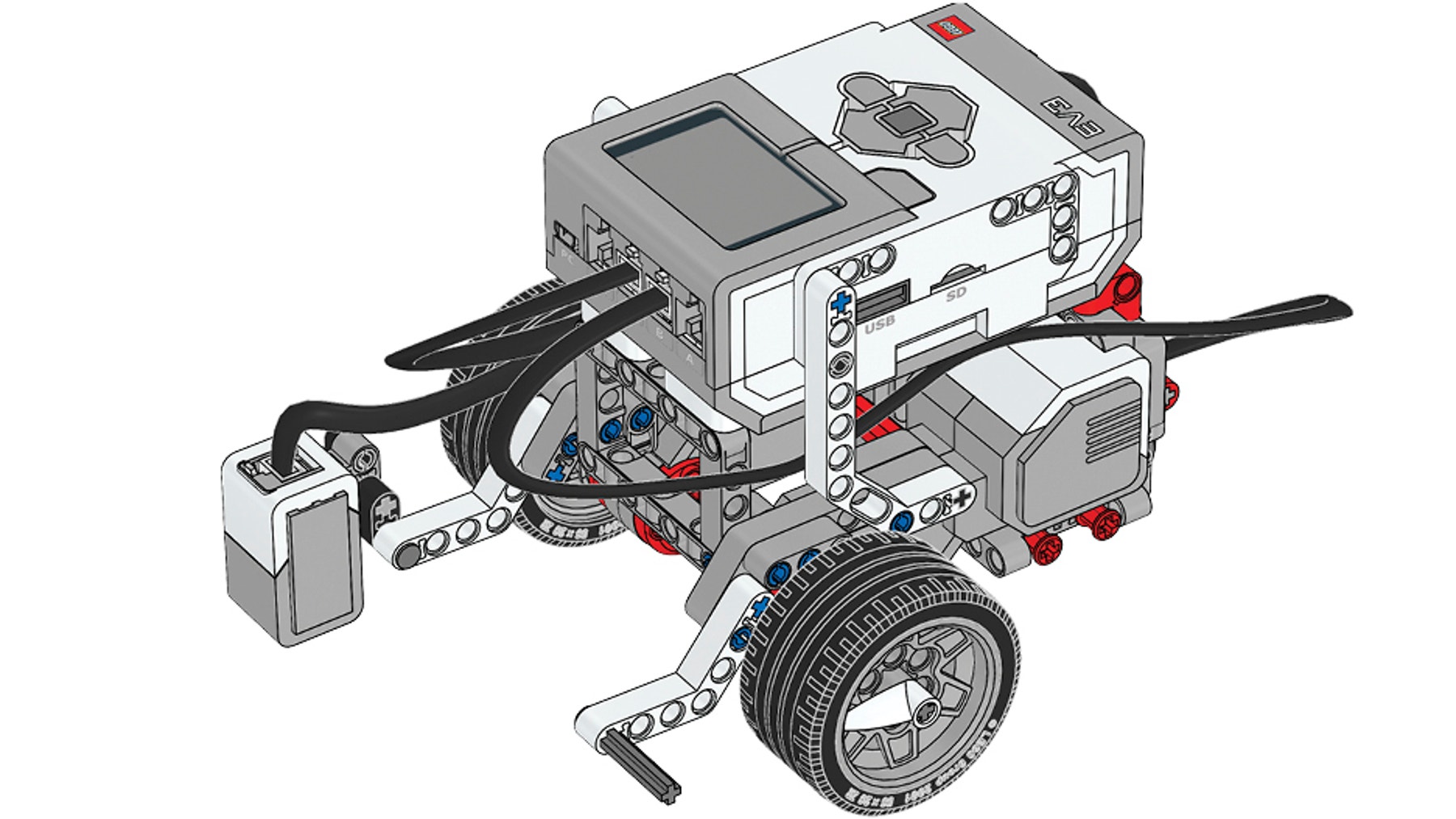
- ペアごとに、ドライビングベースに搭載するカラーセンサー下向き拡張パーツを組み立てるよう指示します。
- 生徒が用意されたプログラミングスタックを使って、カラーセンサーで線を検出したり、線に沿って走行する方法を試す時間を設けてください。
4.説明 (10分)
- プログラミングスタックを使ってカラーセンサーを調整し、どのような変化があったか観察するよう指示します。
- カラーセンサーの調整が重要な理由についてディスカッションを促してください。
5.仕上げ (10分)
- より正確に線に沿って走行できるプログラムを作れるかどうか挑戦してもらいましょう。
- 清掃の時間も忘れずに確保してください。
6.評価
- それぞれの生徒に取り組みを評価して伝えます。
- 評価の際は、以下に提示するルーブリックを参考にすると良いでしょう。
ディスカッションを活性化させる
ロボットに実行させたい動作をすべてハードコードする方法は効率的とは言えません。よって、ロボットには環境に応じて動作を決定するための様々なガイドシステムが搭載されています。シンプルで効率的な方法の1つが、ロボットがセンサーを使って検出できる色で床に線を描く方法です。

以下のような質問をして、色を検出できるロボットについてのディスカッションを促してください:
- 色を検出できるロボットにはどのようなものがありますか?
- 床に線を描いてロボットの進路を指示する方法の利点と弱点は何ですか?
- *反射光の強さ*とは何ですか?また、カラーセンサーはどのように機能しますか?
組み立てのヒント
進路を準備する
生徒に黒の粘着テープを配布し、ロボットが検出し、それに沿って走行する線を床に描くよう指示します。色々な種類の線を使うよう促してください。ただし、極端な鋭角に沿って走行するのは難しいことを注意しておきましょう。
カラーセンサーを使う
カラーセンサーは、このチャレンジを解決するために2種類のモードで使用することができます(カラーモードまたは反射光の強さモード)。
反射光の強さモードを使うと、カラーセンサーの精度が高くなります。線に沿って走行する動作は、2つの色または2つの反射光の強さを交互に検出することで行われています。センサーが検出値をどのように報告しているかを生徒と一緒に調べる時間を設けてください。
プログラミングのヒント
メインプログラム

解決方法

個別化
学習に困る生徒が多い場合は、次のように学習方法を工夫してみましょう:
- カラーセンサーの反射光の強さモードについて説明する。
- ドライビングベースが走行する線をシンプルにする。
この学習で物足りない場合は、次のように学習方法を工夫してみましょう:
- 異なる幅、色、形の線に沿って走るようにプログラムを修正させる。
- シンプルな*比例制御ライントレース* (上の*プログラミングのヒント*のセクションを参照) と呼ばれるプログラムを提示し、生徒にプログラムの動作方法を解読させます。
学習評価
この学習におけるルーブリックの例
次のルーブリックを参考に、評価規準や判定基準を作成しましょう。
1.課題を部分的にこなした。
2.課題を十分にこなした。
3.期待を上回る達成度であった。
以下の成功基準を使用して、生徒の進度を評価します。
- カラーセンサーを使って線に反応するプログラムを作成することができる。
- カラーセンサーを調整でき、センサーの調整が重要な理由を説明することができる。
- ライントレーサープログラムを最適化し、正確度を向上させることができる。
自己評価
それぞれの生徒に、自分の成果に最もよくあてはまるレベルを選ばせます。
- ブロンズ:ドライビングベースを黒の線で停止させることができた。
- シルバー:ドライビングベースが線に沿って走行するようプログラミングすることができた。
- ゴールド:ドライビングベースが線に沿って走行するようプログラミングし、照明条件に合わせてカラーセンサーを調整することができた。
- プラチナ:ドライビングベースが線に沿って走行するようプログラミングし、照明条件に合わせてカラーセンサーを調整しただけでなく、ドライビングベースがより速く、効率的に走行できるよう最適化することができた。

国語の発展課題
言語能力の発達を促すために、生徒に以下のタスクに取り組んでもらいます:
- シンプルな*比例制御ライントレーサー* (上の*プログラミングのヒント*のセクションを参照) と呼ばれるプログラムを作成し、このプログラムの性能をそれ以前に使用したライントレースプログラムと比較した場合の相違点を説明したプレゼンテーションを作成し、発表する。
注:これにより、さらに長い授業をすることができます。
職業適性
この授業を楽しむことができた生徒は、以下の進路について興味がある可能性があります。
- ITエンジニア
- システム建築エンジニア
- プレ・エンジニアリング
教師用サポート
学習内容:
- 黒の線を検出したら停止するようドライビングベースをプログラミングする
- 黒の線に沿って走行するようドライビングベースをプログラミングする
中学校
数学
- C 関数:比例,反比例
理科
- 第1分野:(1)身近な物理現象
技術・家庭
- C エネルギー変換の技術:(2)エネルギー変換の技術による問題の解決
- D 情報の技術:(3)計測・制御のプログラミングによる問題解決
総合的な学習の時間
- (1)探究的な学習の過程において,課題の解決に必要な知識及び技能を身に付け,課題に関わる概念を形成し,探究的な学習のよさを理解するようにする
高校
情報
- 情報Ⅰ:(3)コンピュータとプログラミング
- 情報Ⅱ:(5)情報と情報技術を活用した問題発見・解決の探究
総合的な探究の時間
- (1)探究の過程において,課題の発見と解決に必要な知識及び技能を身に付け,課題に関わる概念を形成し,探究の意義や価値を理解するようにする




