角度とパターン
ジャイロセンサーを使って正確な角度で回転し、マイブロックを使ってプログラムを整理します。

レッスンプラン
1.準備
- EV3 Classroom アプリの生徒用資料を読み、学習課題をよく理解しておきましょう。
- ジャイロセンサーが動く仕組みについて調べておきます。
- このチャレンジを始める前に、このユニットのほかのレッスンをすべて完了しておくことをおすすめします。
- このレッスンを完了するには、ドライビングベースを組み立てておく必要があります (所要時間約30分)。
2.興味付け (5分)
- 「ディスカッションを活性化させる」セクションのアイデアを参考に、生徒の学習への関心を喚起します。
- 生徒にペアを組ませます。
3.探求 (20分)
- ペアごとに、ドライビングベースに搭載するジャイロセンサー拡張パーツを組み立てるよう指示します。
- 生徒が用意されたプログラミングスタックを使って、ジャイロセンサーで方向の変化を検出する方法や、マイブロックを使ってプログラムを整理する方法を試す時間を設けてください。
4.説明 (5分)
- マイブロックを使ってプログラミングブロックを整理し、再利用する方法についてディスカッションを促します。
5.仕上げ (15分)
- ジャイロセンサーとマイブロックを使って、ドライビングベースが正方形を3回描き、次に三角形を1回描くようプログラムできるか挑戦してもらいましょう。
- 清掃の時間も忘れずに確保してください。
6.評価
- それぞれの生徒に取り組みを評価して伝えます。
- 評価の際は、以下に提示するルーブリックを参考にすると良いでしょう。
ディスカッションを活性化させる
ジャイロセンサーは回転の変化を測定し、ロボットが向いている方向を特定するのに利用することができます。車輪付きロボットにジャイロセンサーを搭載すると、正確な回転をしたり、位置を追跡したりすることが可能になります。

以下のような質問をして、ロボットに搭載したジャイロセンサーの用途についてのディスカッションを促してください:
- ロボットが方向の変化を検出して進路を決定する機能は、どのような状況で役立ちますか?
- ジャイロセンサーを使用した機器にはどのようなものがありますか?
- ジャイロセンサーはどのように機能しますか?
組み立てのヒント
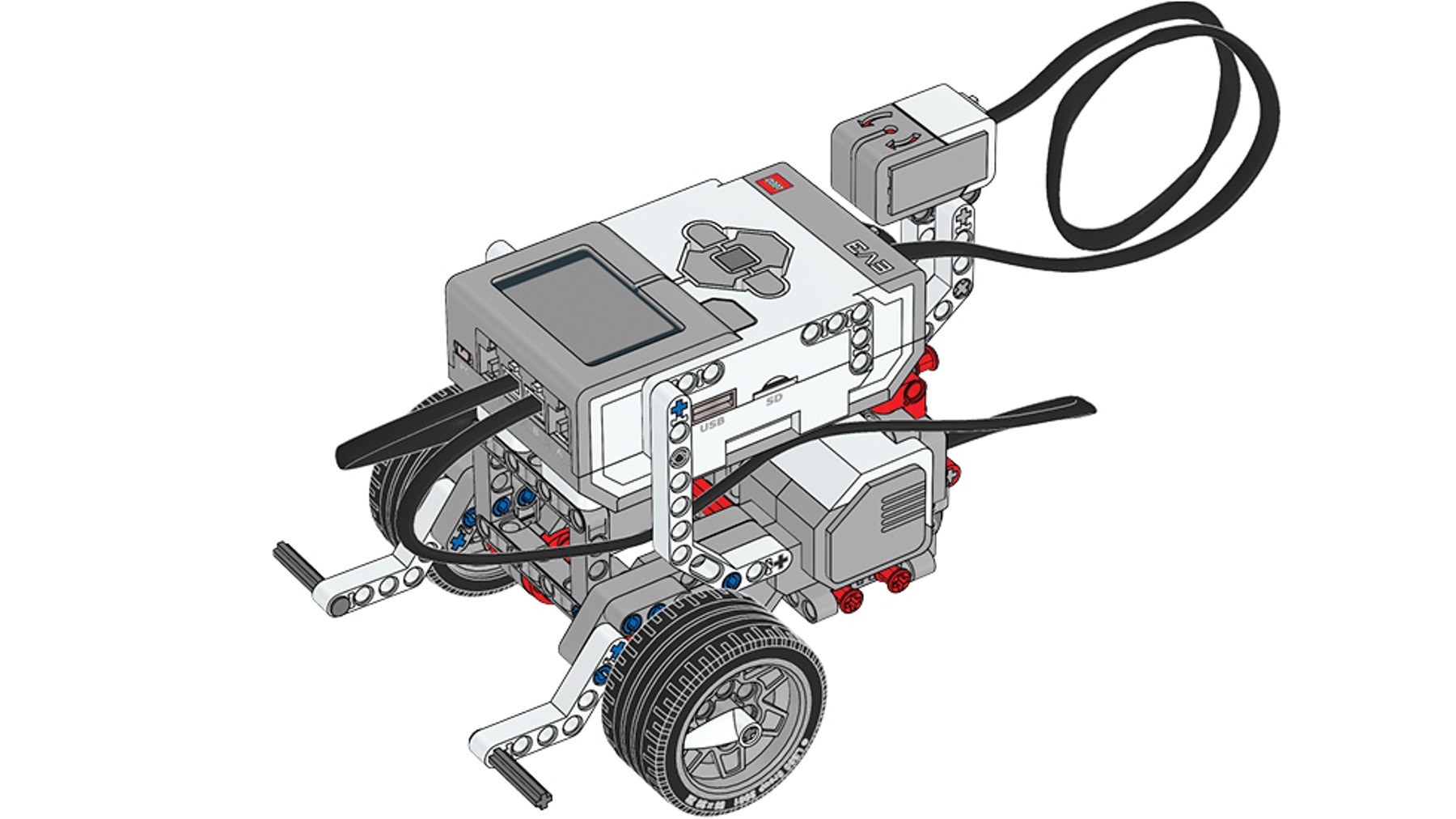
ジャイロセンサーを使う
ジャイロセンサーは、EV3 ブロックに接続している間やEV3 ブロックの起動中は、完全に静止した状態を保つ必要があります。ドライビングベースが静止している間にジャイロセンサーの角度読み取り値が変化した場合は、センサーを接続し直してください。
プログラミングのヒント
メインプログラム

解決方法

個別化
学習に困る生徒が多い場合は、次のように学習方法を工夫してみましょう:
- ジャイロセンサーの使い方を説明する時間を長めに設ける。
- マイブロックの使い方を説明する時間を長めに設ける。
この学習で物足りない場合は、次のように学習方法を工夫してみましょう:
- ドライビングベースが「Z」を描くようプログラミングできるか挑戦させる。
- 迷路を作り、ロボットがゴールまで到達できるプログラムを、誰が最初に作ることができるか競争させる。
学習評価
この学習におけるルーブリックの例
次のルーブリックを参考に、評価規準や判定基準を作成しましょう。
1.課題を部分的にこなした。
2.課題を十分にこなした。
3.期待を上回る達成度であった。
以下の成功基準を使用して、生徒の進度を評価します。
- ドライビングベースがジャイロセンサーの角度読み取り値を使って様々な図形を描きながら走行す�るようプログラムすることができる。
- マイブロックのプログラムを構成することができる。
- マイブロックを使ってプログラムを整理し、管理しやすくする方法を理解している。
自己評価
それぞれの生徒に、自分の成果に最もよくあてはまるレベルを選ばせます。
- ブロンズ:ジャイロセンサーの角度読み取り値に基づいて、ドライビングベースに45°回転させることができた。
- シルバー:ジャイロセンサーの角度読み取り値に基づいて、ドライビングベースに三角形を描きながら走行させることができた。
- ゴールド:ジャイロセンサーの角度読み取り値に基づいて、ドライビングベースに正方形を描きながら走行させるマイブロックを作ることができた。
- プラチナ:マイブロックを作り、ジャイロセンサーの角度読み取り値に基づいて、ドライビングベースに繰り返し正方形を描きながら走行させるプログラムを整理することができた。

国語の発展課題
言語能力の発達を促すために、生徒に以下のタスクに取り組んでもらいます:
- ドライビングベースをどのようにプログラミングしたか、また、マイブロックをどのように使ってプログラムを整理し、簡略化したかを説明するプレゼンテーションを作成し、発表する。
注:これにより、さらに長い授業をすることができます。
職業適性
この授業を楽しむことができた生徒は、以下の進路について興味がある可能性があります。
- コンピュータープログラマー
- ゲームプログラマー
- ITエンジニア
教師用サポート
学習内容:
- ドライビングベースが特定の角度で停止するようプログラミングする
- マイブロックを使ってプログラムを整理する
教育版® レゴ マインドストーム® EV3 基本セット
EV3 Classroom アプリ
分度器 (オプション)
中学校
数学
- B 図形:平面図形
理科
- 第1分野:(1)身近な物理現象
技術・家庭
- C エネルギー変換の技術:(2)エネルギー変換の技術による問題の解決
- D 情報の技術:(3)計測・制御のプログラミングによる問題解決
総合的な学習の時間
- (1)探究的な学習の過程において,課題の解決に必要な知識及び技能を身に付け,課題に関わる概念を形成し,探究的な学習のよさを理解するようにする
高校
情報
- 情報Ⅰ:(3)コンピュータとプログラミング
- 情報Ⅱ:(5)情報と情報技術を活用した問題発見・解決の探究
総合的な探究の時間
- (1)探究の過程において,課題の発見と解決に必要な知識及び技能を身に付け,課題に関わる概念を形成し,探究の意義や価値を理解するようにする




