スイッチ
スイッチ ブロックを使って、センサーに基づいた動的な判断を行います。
テストする
表示されたプログラムを作成し、ダウンロードして実行します。
サンプルプログラム '01' がキャンバス上に提供されました。
ヒント
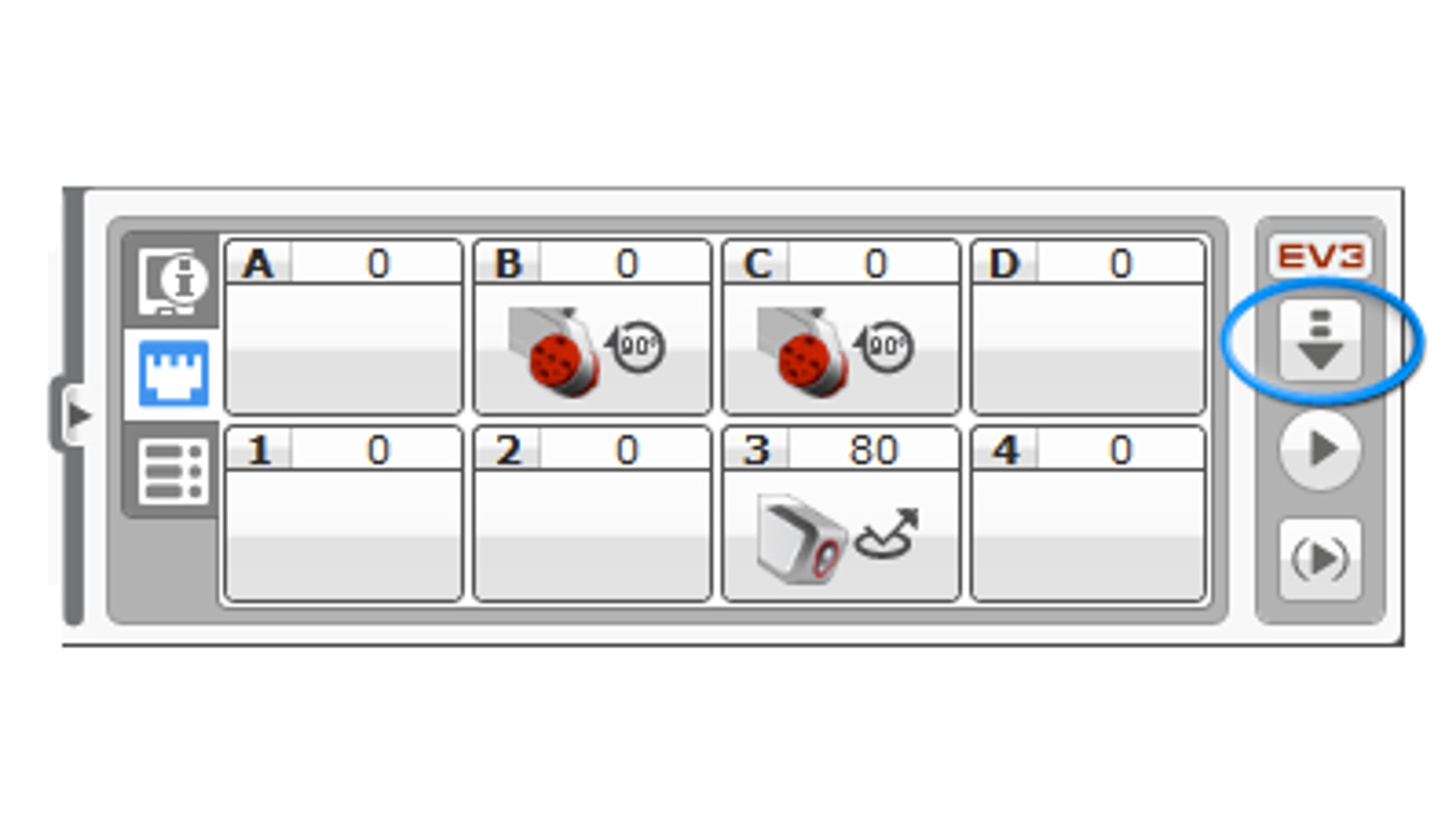
EV3 ブロックのポート ビュー アプリを、リアルタイムでセンサー値を表示するために利用することもできます。
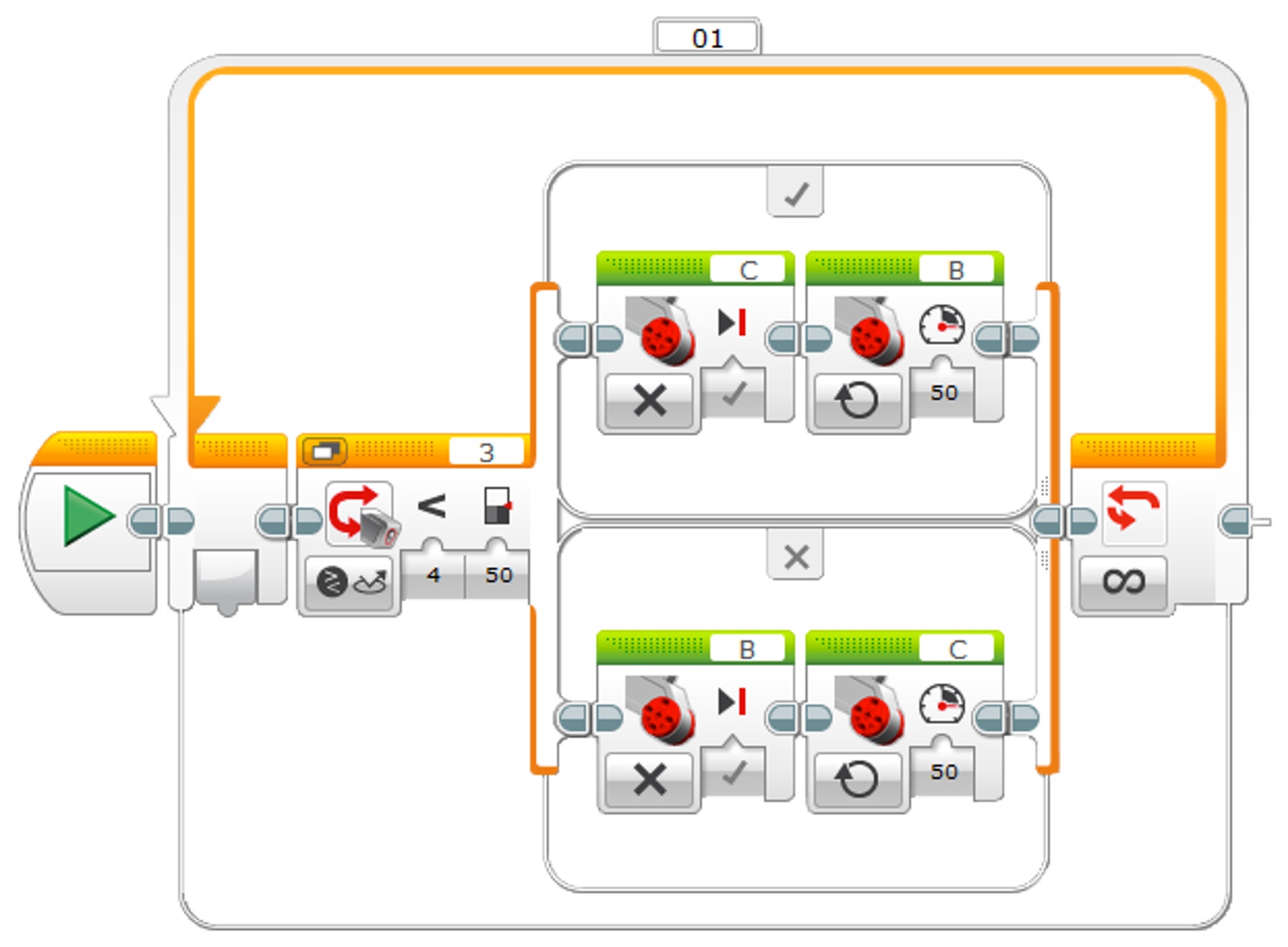
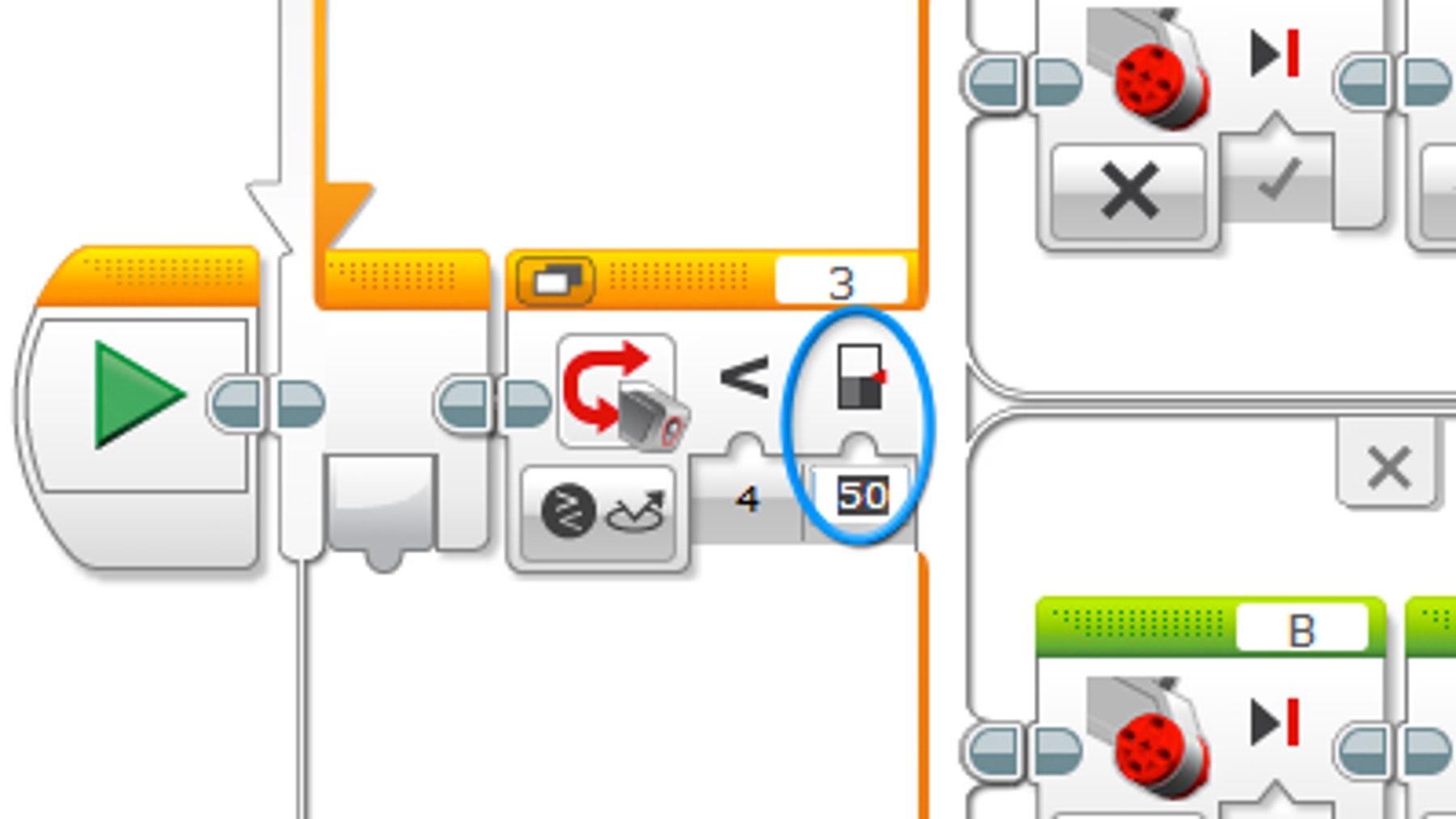
プログラム サマリー
スタート
ループ – 無限
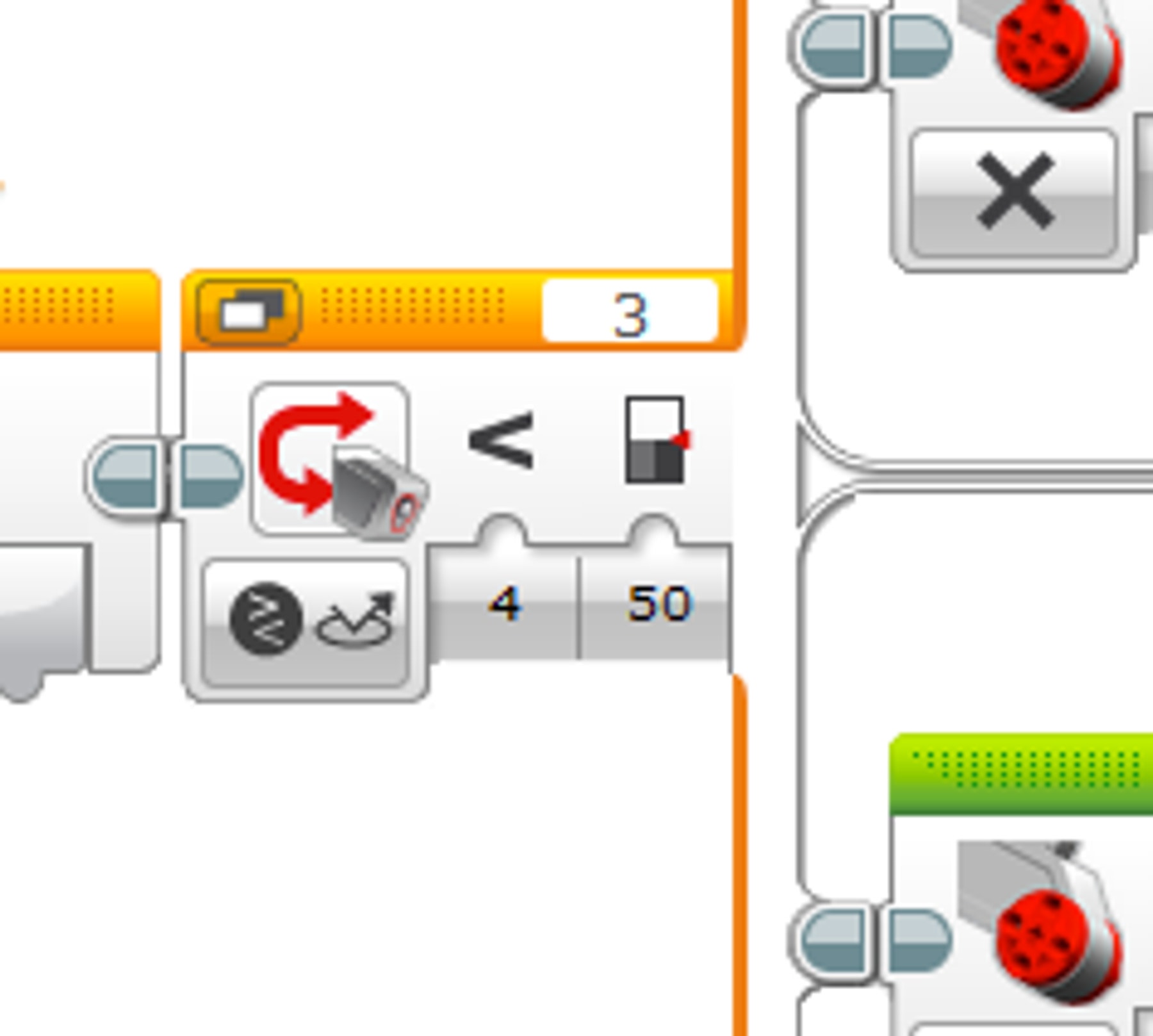
待機 – カラー センサー – 比較した反射光の強さ[未満, 50]
真の場合:L モーター C - オフ
真の場合:L モーター B - オン
偽の場合:L モーター B - オフ
偽の場合:L モーター C - オン
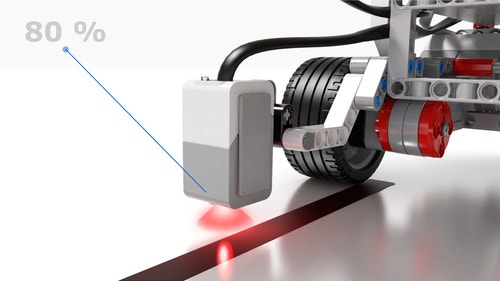
しきい値を設定する
しきい値はセンサーの上限値と下限値を設定し、これを使って次にしきい値となる平均値を求めます。次のページでは、カラー センサーの光に対する感度のしきい値を設定します。
まず、トレーニングロボットが USB 経由で接続されていることを確認し、カラー センサーを暗い色の線の上で動かします。

次に、ハードウェア ページを開き、ポート 3 に示されている値をメモします。これは最小値(x)です。
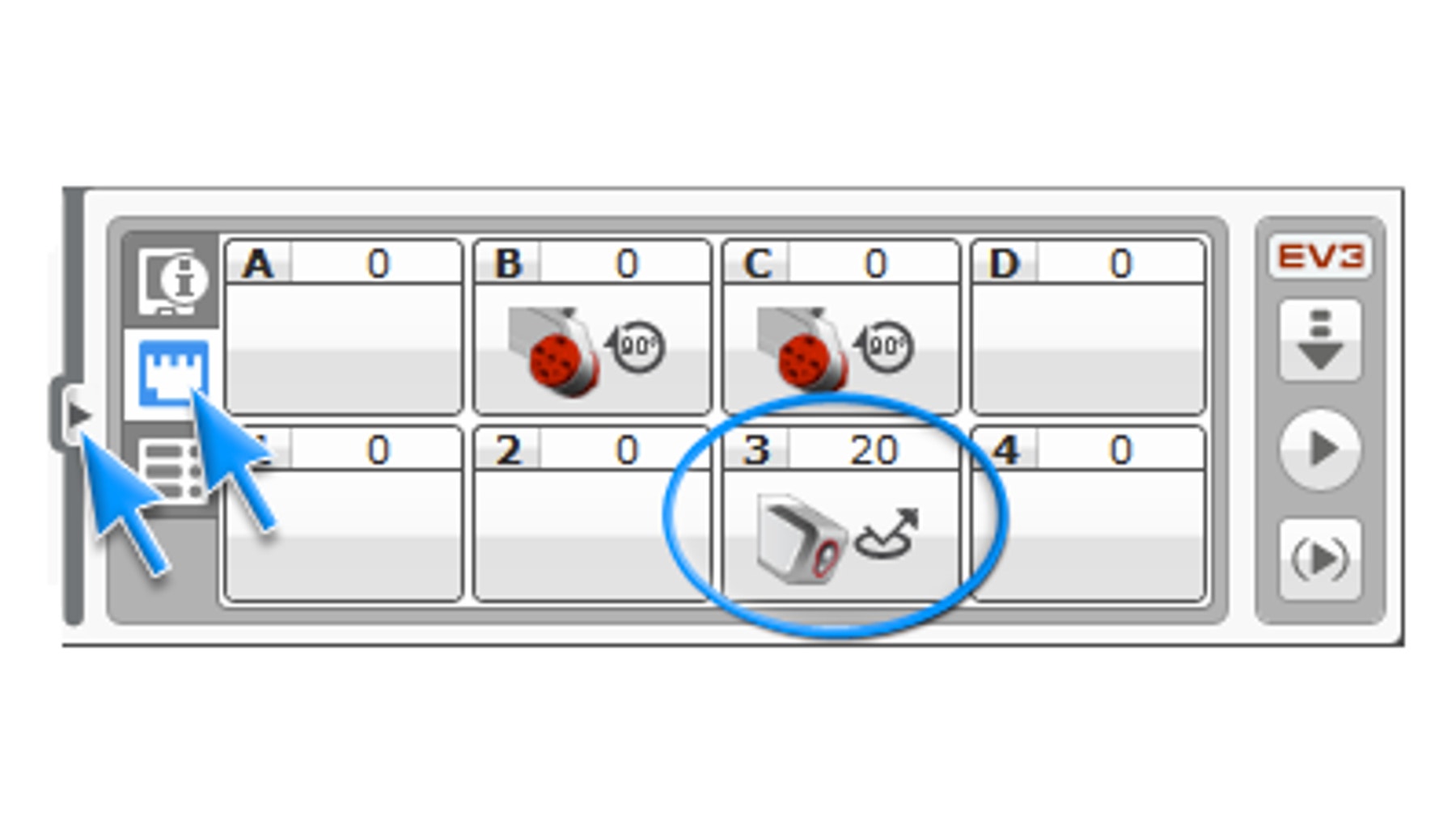
今度は、カラー センサーを暗い色の線から離します。
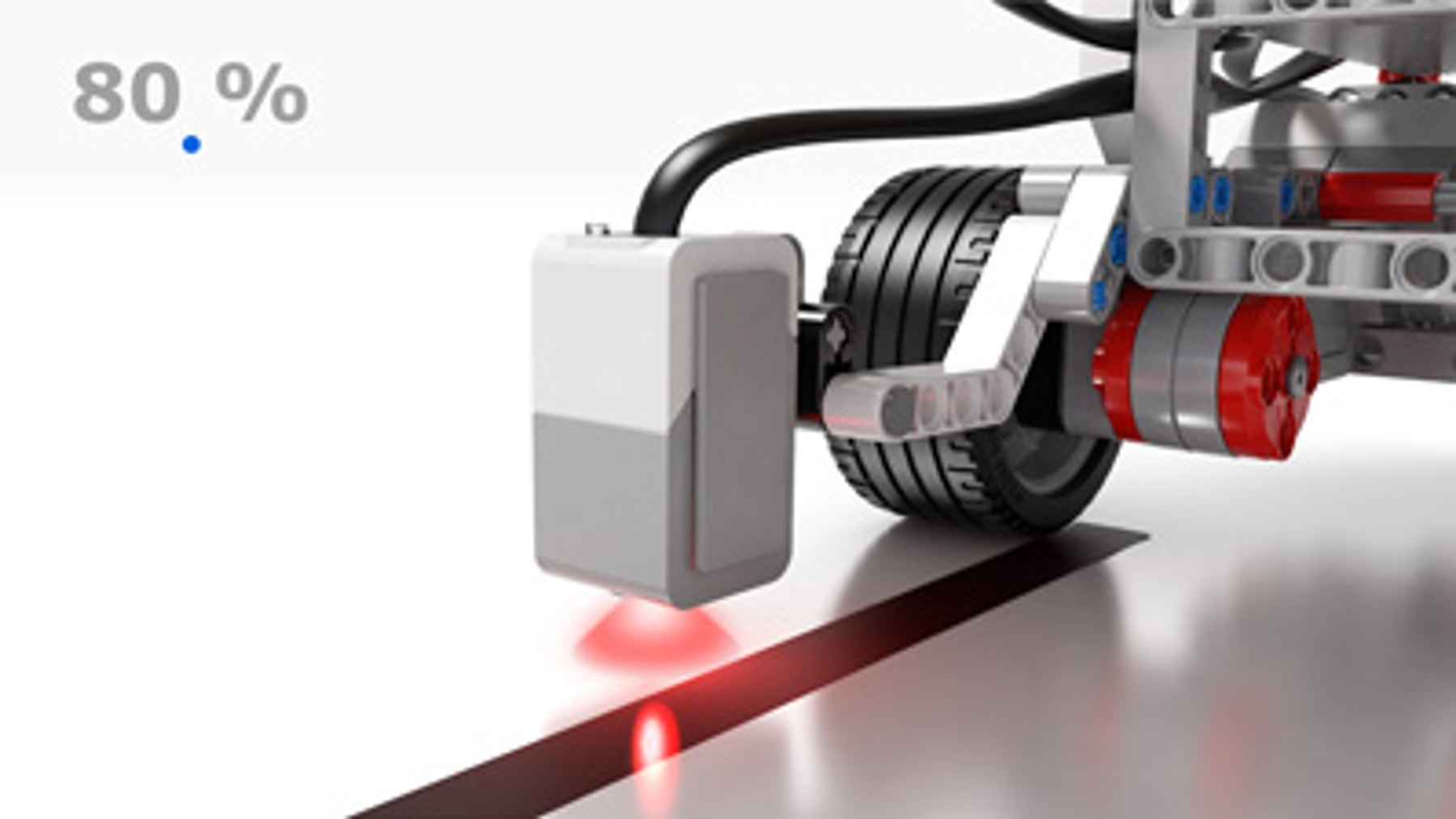
ポート 3 に示された値をメモします。これは最大値(y)です。
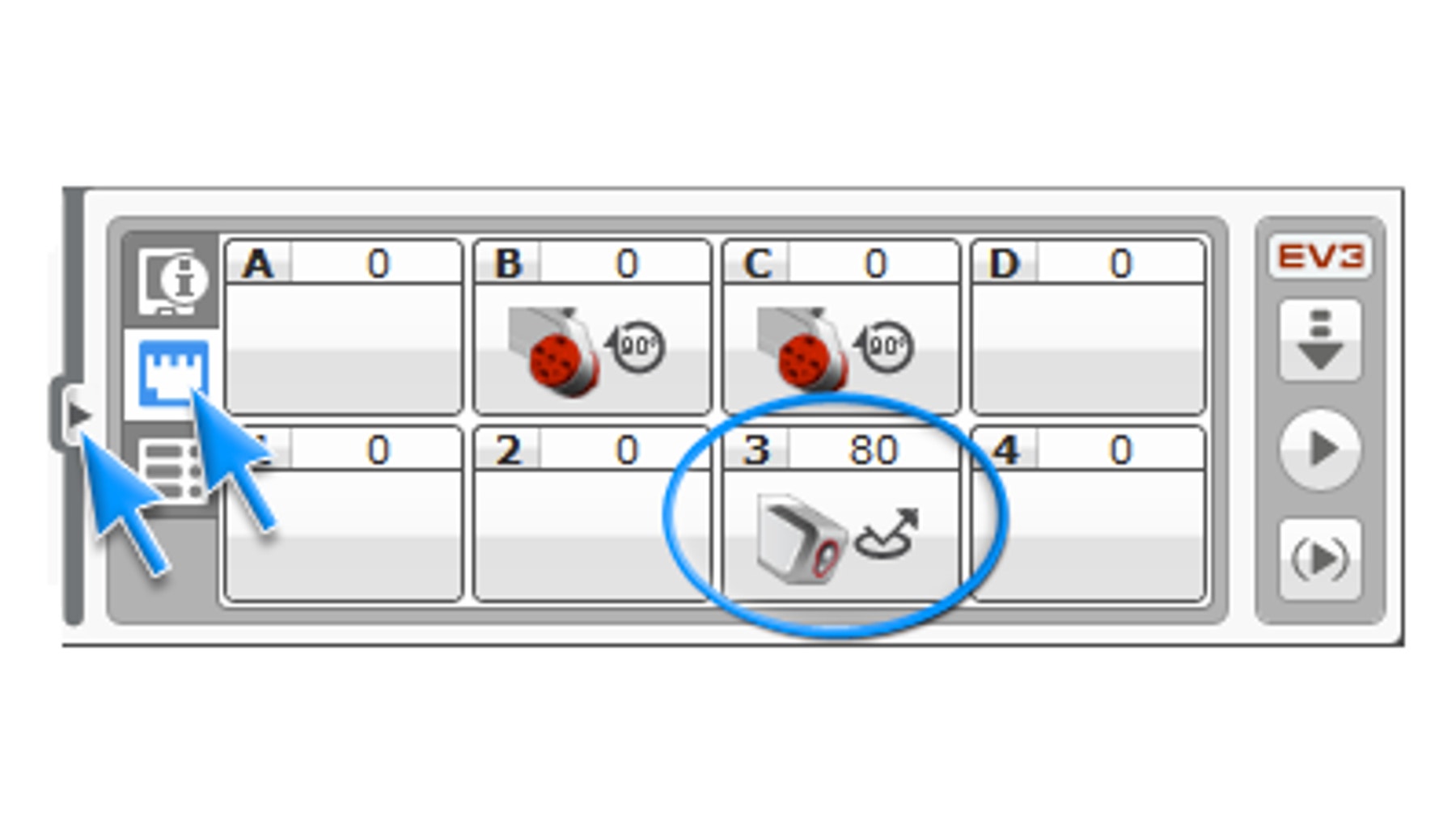
しきい値を設定するには、方程式 (x+y)/2 を計算し、スイッチ ブロックに結果を入力します(あなたの値は示されている例とは違うものとなるでしょう)。
テストするにはダウンロードして実行してください!
次にプログラムをダウンロードします。
チャレンジしよう!
今度はあなたの番です!明るい色の線を辿る時にトレーニングロボットが作動するかどうかテストしてください。作動しない場合、しきい値を再度設定してみてください。
トラブルシューティング
ある時点で、線から反射したセンサー ライトがしきい値を超え、トレーニングロボットを円形状に駆動させます。こういう状態になれば、しきい値を変更してください。
ヒント
x と y の値の間の差が小さすぎる場合、線は検知されません。この場合、センサーを再調整してみてください。
さて、次は?

教師用サポート
以下のことに取り組みます:
スイッチ ブロックを使って、センサーに基づいた動的な判断を行います。
教育版 レゴ マインドストーム EV3 基本セット
EV3 ソフトウェアまたはプログラミングアプリ




