공장 로봇
레고^®^ 공장 역시 자율주행 로봇을 이용해 여러 가지 작업을 수행하고 있어요.


로봇의 과제 중 하나가 바로 작업대 사이에서 상자를 옮기는 일이에요. 배터리가 부족해지면 알아서 충전소를 찾아가기까지 한답니다! 벽, 사람 또는 다른 로봇과 부딪히지 않고 효율적으로 작업을 수행하죠.
드라이빙 베이스로도 그와 비슷한 작업을 할 수 있지 않을까요?
과제를 설명할게요!
확장 요소를 설계하여 드라이빙 베이스에 장착하고, 다음과 같이 프로그램을 작성하세요.
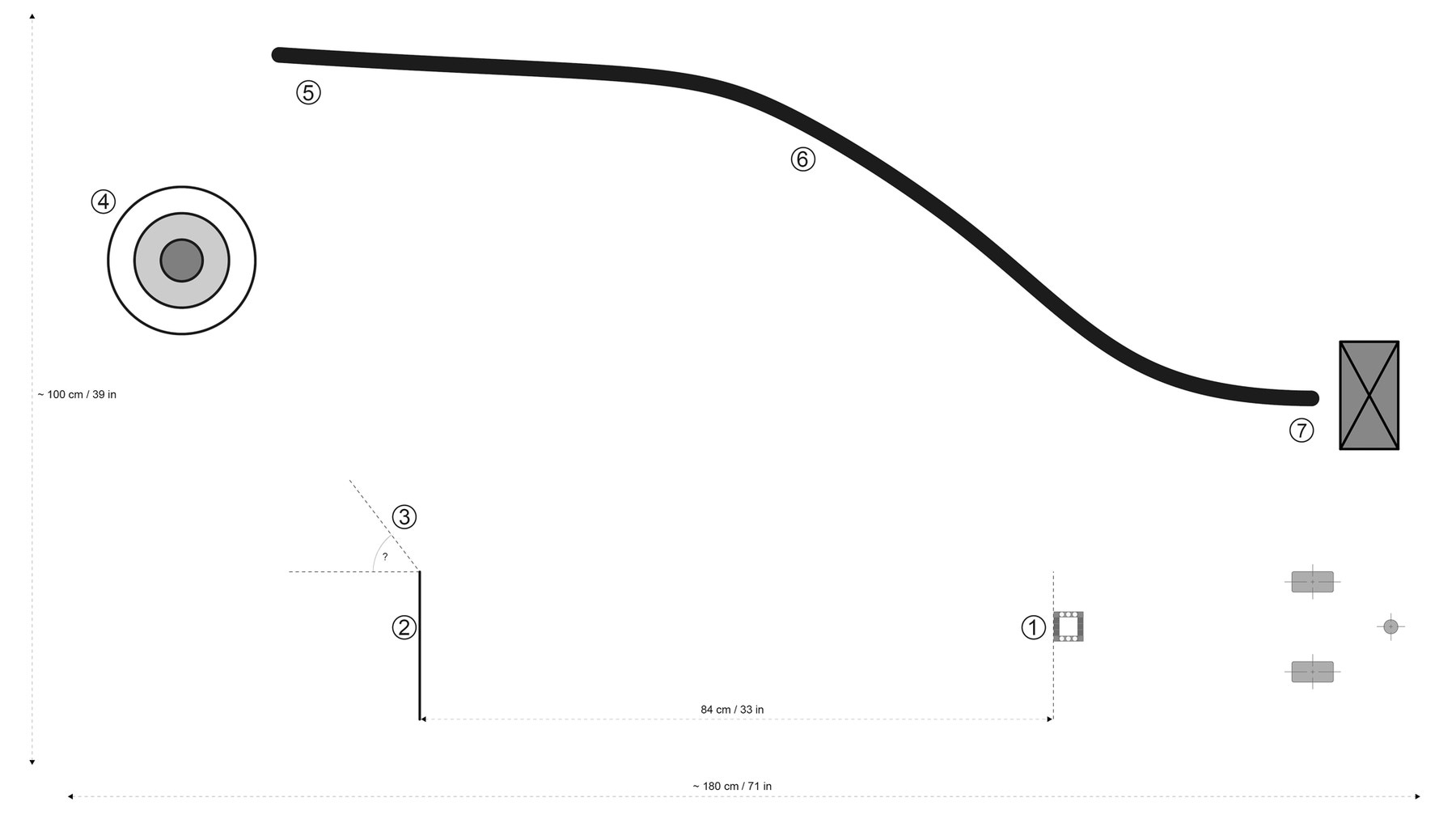
- 직육면체를 잡고, 목적지 구역의 중심에 가장 가까운 곳으로 이동한 후, 내려놓으세요.
- 충전소로 이어지는 선을 감지하고 따라 이동한 후, 커다란 물체와 최대한 가까운 곳에 멈추세요(단, 접촉하면 안 돼요).
물체를 목적지 구역으로 운반하세요.

직육면체를 붙잡아서 목적지 구역의 중심에 운반하기 위한 솔루션을 테스트할 준비가 완료될 때까지 아이디어를 브레인스토밍하고 로봇을 수정하세요.
브레인스토밍 팁:
주된 과제를 작은 하위 과제로 나누고, 아래와 같은 질문을 주제로 브레인스토밍을 실시하세요.
- 어떻게 해야 로봇이 직육면체를 붙잡을 수 있을까요?
- 로봇이 어떻게 목적지 구역의중심으로 이동할 수 있을까요?
- 이전 수업에서 사용되었던 확장 요소 중 어느 것이 이번 과제에도 유용할까요?
선을 따라 충전소까지 이동하세요.
선을 따라 충전소까지 이동하고 커다란 물체 바로 앞에서 멈추기 위한 솔루션을 테스트할 준비가 완료될 때까지 아이디어를 브레인스토밍하고 로봇을 수정하세요.
브레인스토밍 팁:
주된 과제를 작은 하위 과제로 나누고, 아래와 같은 질문을 주제로 브레인스토밍을 실시하세요.
- 어떻게 해야 로봇이 선을 감지하고 따라가게 할 수 있을까요?
- 어떻게 해야 로봇이 선을 따라간 후에 커다란 물체와 최대한 근접한 위치에 멈춰서게 할 수 있을까요?
- 이전 수업에서 사용되었던 확장 요소 중 어느 것이 이번 과제에도 유용할까요?
과제를 완료하세요.

시작 위치에 로봇을 배치하고, 로봇이 과제를 잘 해내는지 확인하세요.
- 직육면체를 붙잡아 목적지 구역의 중심으로 운반
- 선을 따라 충전소까지 이동
어땠나요?
무엇을 잘했나요? 뭔가 더 잘할 수 있지 않았을까요?
멋져요! 드라이빙 베이스의 달인이 되셨군요. 이제 공장에 배치할 준비가 완료되었어요!