Objekter og hindringer
Drivingbasen er en modulær robotplattform.

Den kan utvides og konfigureres etter behov. Ved å legge til sensorer kan den reagere på faktorer i miljøet slik at den gjør ting som å oppdage hindringer og unngå kollisjoner.
Vet du om noen roboter som kan oppdage objekter?
Bygg kuben og denne utvidelsen.
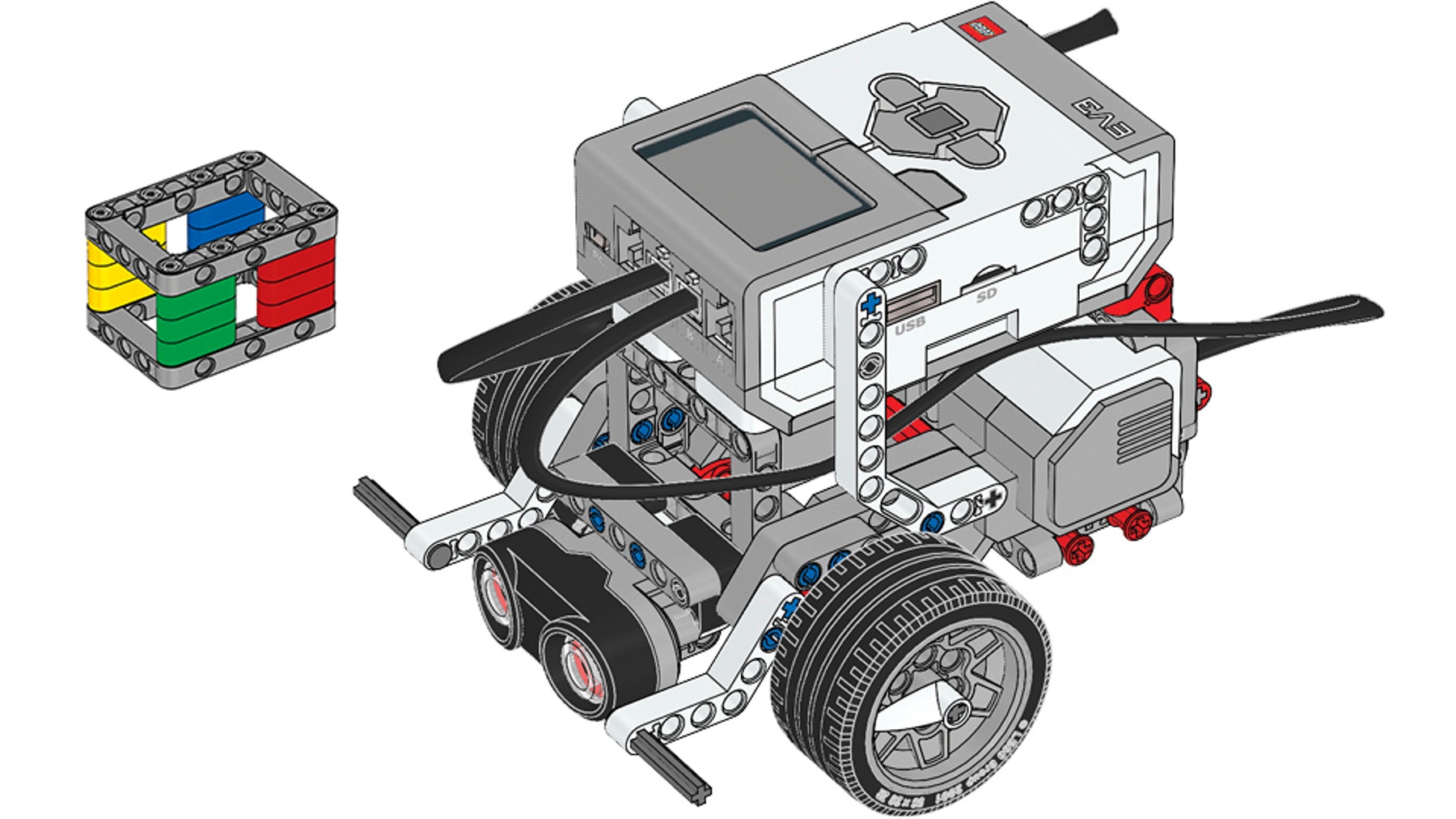
Du trenger ultralydsensorutvidelsen for å oppdage objekter og hindringer. Bygg kuben, og bygg deretter utvidelsen på kjørebasen.
Prøv disse kodesekvensene, én etter én.

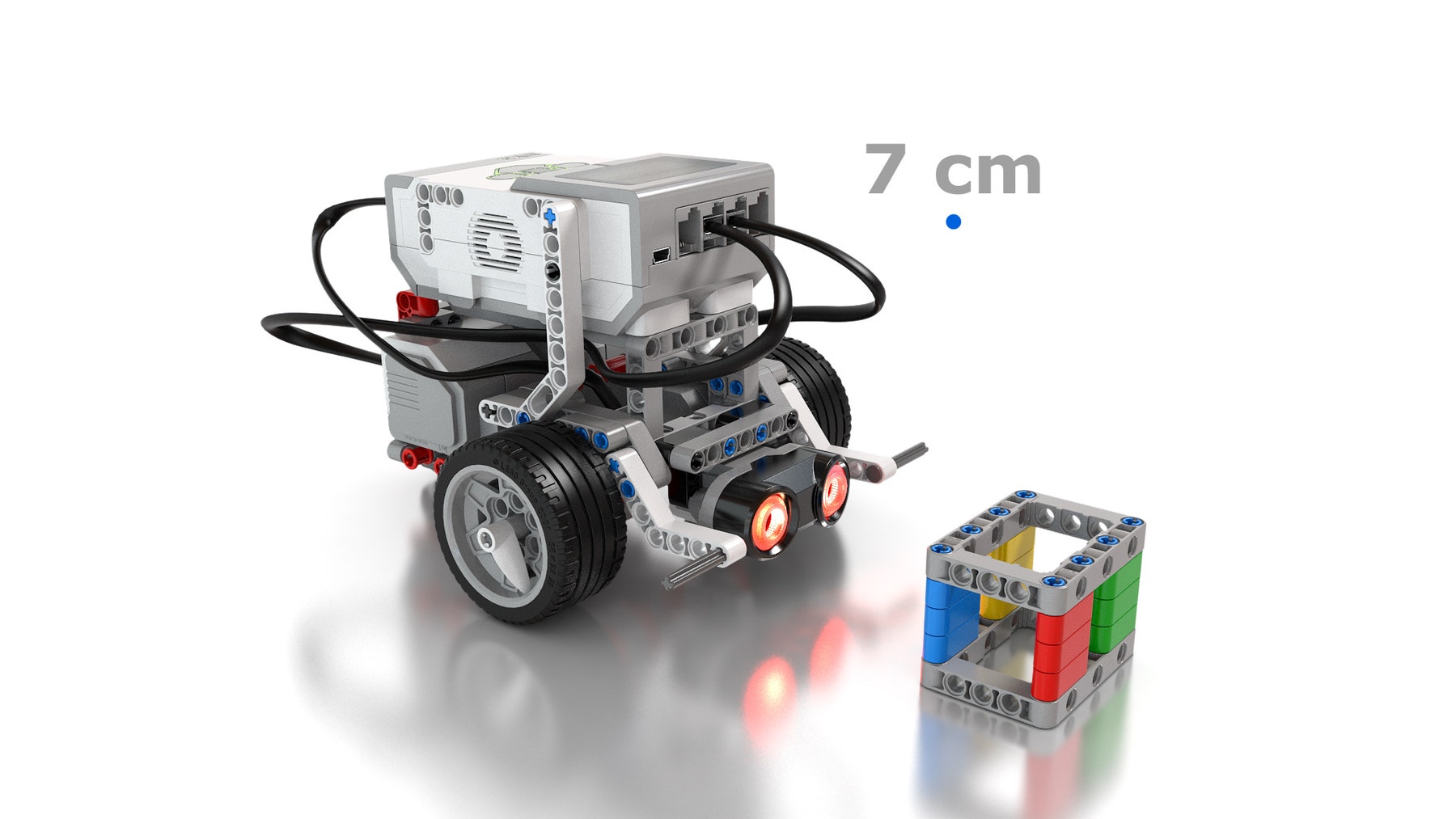
Hva ser du? Prøv å plassere kuben i forskjellige posisjoner.
I hvilke situasjoner kan du bruke ultralydsensoren til å måle distanse?
Din tur!

Bruk blokker fra programsekvensene som allerede finnes på arbeidsområdet til å opprette et program som reagerer på to forskjellige distanser til kuben.
Det er på tide med en utfordring!
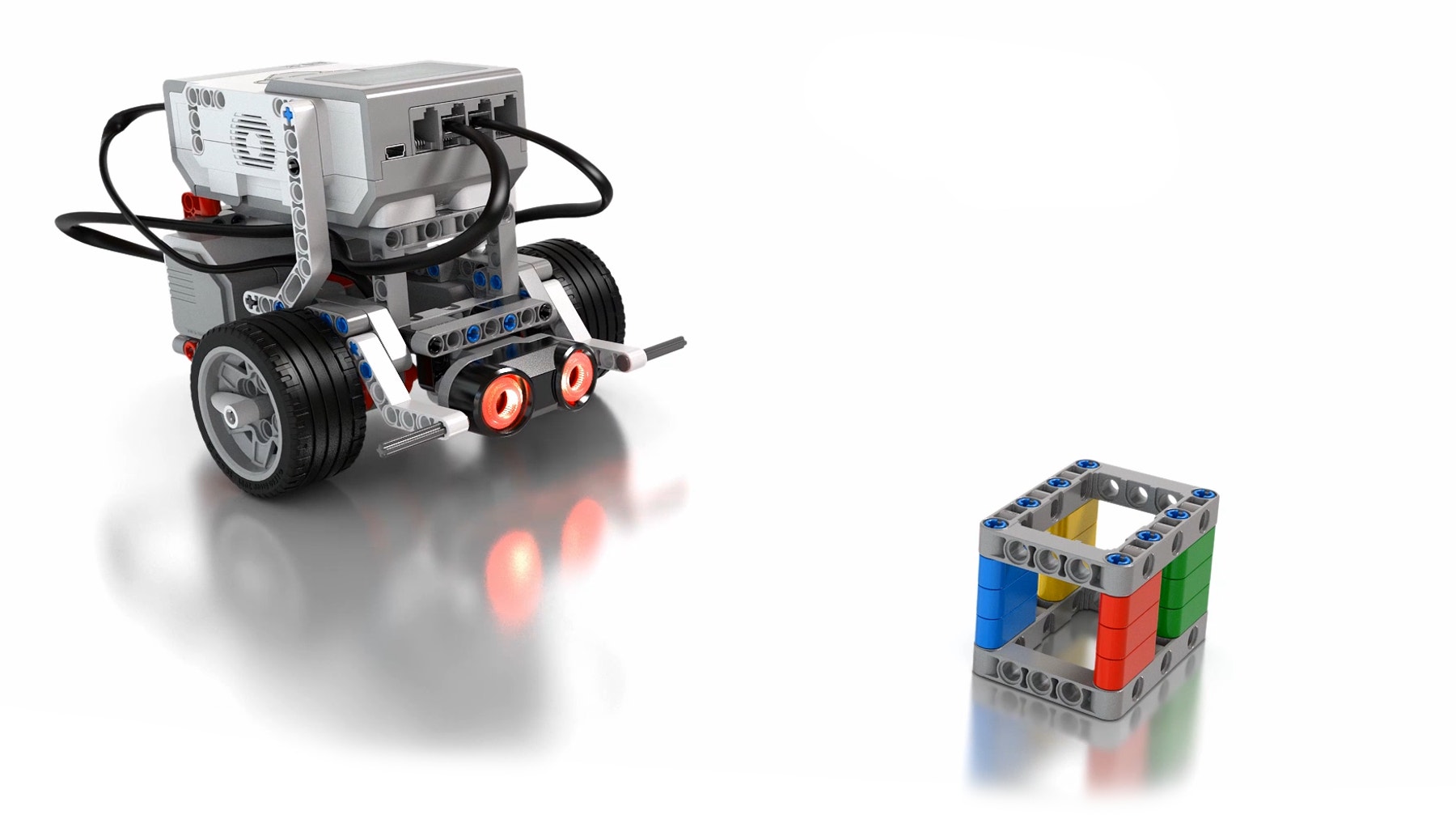
Programmer kjørebasen til å pipe raskere eller høyere når den kommer nærmere kuben.
Hvordan gikk det?

Hva fikk du til? Er det noe du kunne ha gjort bedre?
Sikkerhet kommer først! Nå kan du oppdage eventuelle hindringer og reagere på dem.