Gripe og slippe
Vi trenger noen motoriserte verktøy.

Motoriserte verktøy kan festes til roboter for å gjøre dem i stand til å utføre forskjellige oppgaver. Nå er det på tide å finne det rette verktøyet for jobben!
Hvilke motoriserte verktøy trenger kjørebasen for å kunne flytte rundt på objekter?
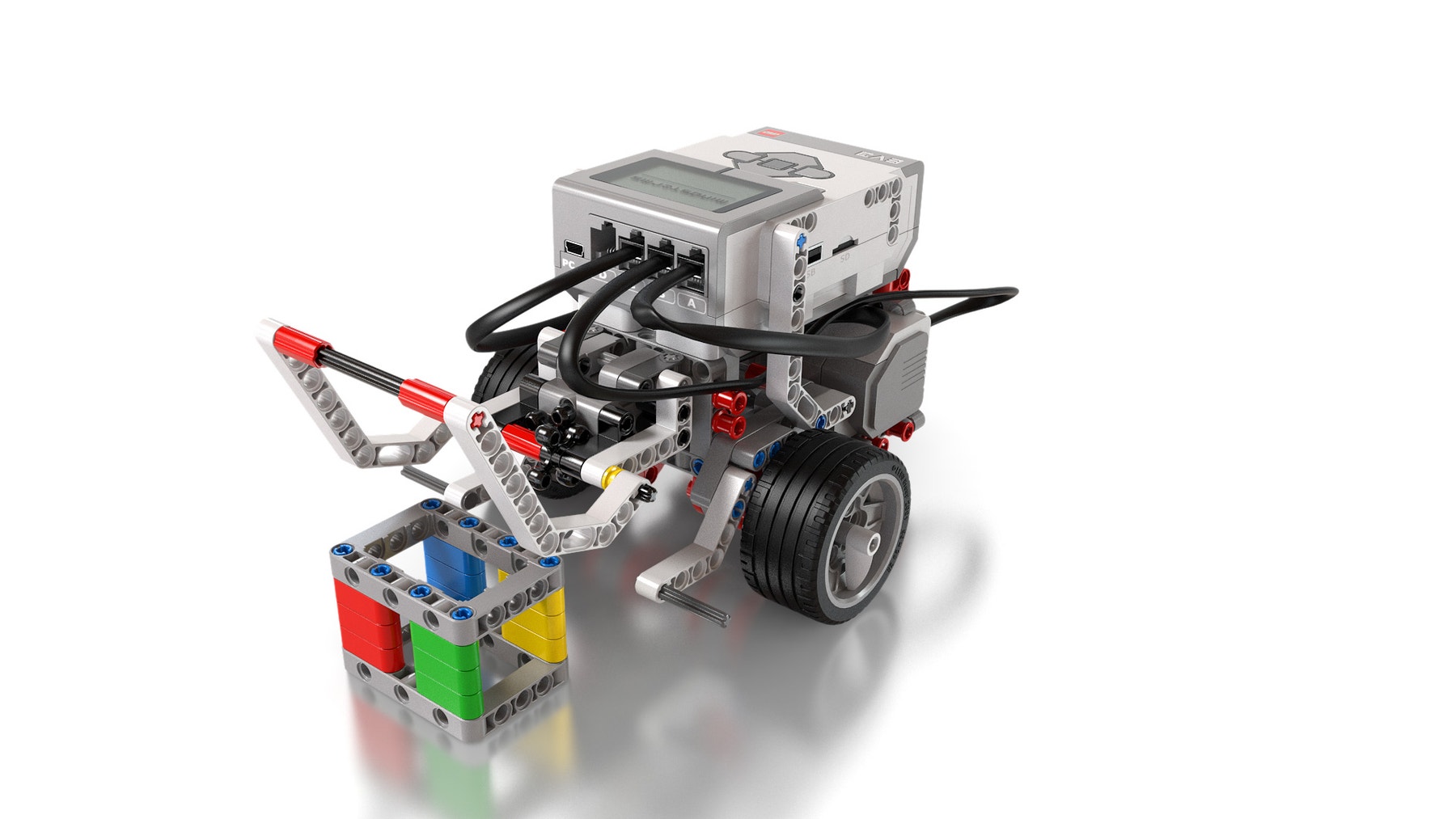
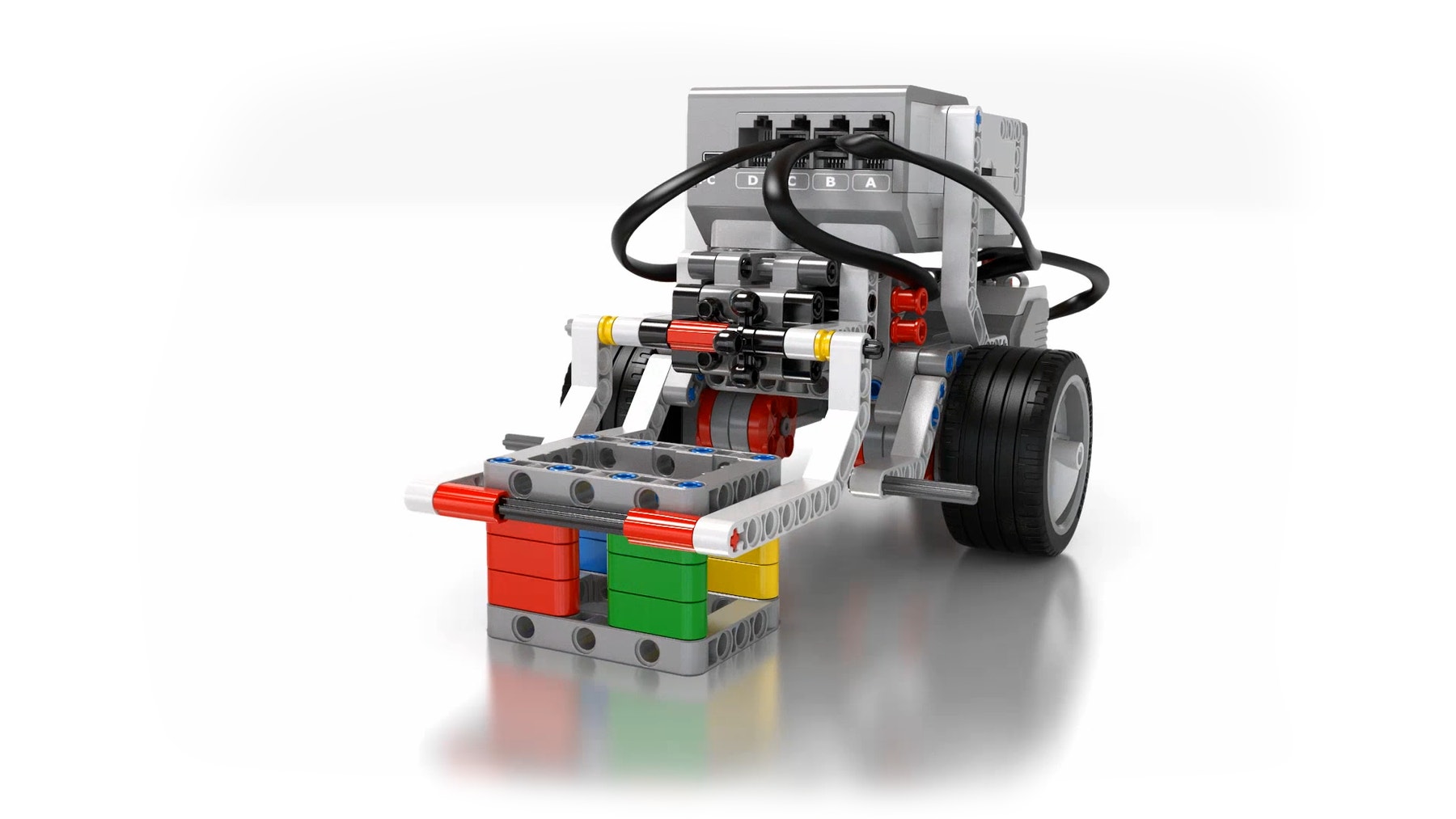
Bygg kuben og disse utvidelsene.

Vi bruker utvidelsen til middels motor for å gripe og slippe kuben. Du trenger også ultralydsensorutvidelsen fra forrige leksjon. Bygg kuben, og bygg deretter utvidelsene på kjørebasen.
Prøv disse kodesekvensene, én etter én.

Hva ser du? Prøv å plassere kuben i forskjellige posisjoner.
Hva er de viktigste funksjonene og begrensningene i utvidelsen til middels motor?
Din tur!
Bruk blokker fra programsekvensene som allerede finnes på arbeidsområdet til å opprette et program som griper tak i kuben, kjører fremover for et antall rotasjoner, slipper kuben og til slutt kjører tilbake til startposisjonen.
Det er på tide med en utfordring!

Programmer kjørebasen til å bruke ultralydsensoren slik at den stopper nær kuben, og deretter senker armen for å hente og returnere kuben til startposisjonen.
Hvordan gikk det?
Hva fikk du til? Er det noe du kunne ha gjort bedre?
Dette har du kontroll på! Du kan gripe og slippe objekter, flytte dem dit du vil.