Fabrikkroboten
Utform og bygg utvidelser på kjørebasen og programmer den til å fullføre to oppgaver.

Leksjonsplan
1. Forberede
- Les gjennom elevmaterialet i EV3 Classroom-appen.
- Samle inn informasjon om oppgavene selvstyrende roboter med hjul kan utføre i fabrikker og lagre.
- Du trenger svart tape, tusjer, et målebånd og et stort objekt for å opprette fabrikkbanen til denne leksjonen.
- Det anbefales at elevene fullfører de andre leksjonene i dette emnet før de begynner på denne utfordringen.
- For å fullføre denne leksjonen, må de ha bygget kjørebasemodellen. Det tar omtrent 30 minutter.
- Planlegg denne leksjonen over flere timer.
Del A
2. Engasjere (10 min.)
- Bruk ideene i Starte en diskusjon-delen nedenfor til å engasjere elevene i en diskusjon knyttet til denne leksjonen.
- Del klassen inn i par.
3. Utforske (35 min.)
- Be elevene om å utvikle ideer til hvordan de kan utvide kjørebasen slik at den griper kuben, og deretter slipper den midt i målsirkelen.
- Oppmuntre dem til å bygge flere prototyper, hvor de utforsker både byggingen og programmeringen.
- La elevene få nok tid til å bygge og teste løsningene.
Del B
4. Utforske (10 min.)
- Start en diskusjon om de viktigste funksjonene til roboten for å få den til å følge linjen og stoppe foran det store objektet.
5. Utdype (35 min.)
- Be elevene om å utvikle ideer til hvordan de utvider kjørebasen slik at den følger linjen og stopper så nært som mulig til det store objektet.
- La dem fortsette med roboten til de er klare for å fullføre utfordringen.
- Ikke glem å gi elevene nok tid til å rydde opp.
6. Evaluere
- Gi tilbakemelding på elevenes arbeid.
- Evaluer kreativiteten til løsningen og hvor bra laget jobbet sammen.
- Du kan bruke de vedlagte vurderingsrubrikkene for å forenkle prosessen.
Start en diskusjon
Én av oppgavene til selvstyrende roboter med hjul i LEGO® fabrikken er å flytte esker mellom de ulike arbeidsstasjonene. Disse fullstendig selvstyrende robotene finner også den nærmeste ladestasjonen når batteriet blir lavt! De utfører oppgavene på en effektiv måte, uten å treffe vegger, mennesker eller andre roboter.

Bruk disse spørsmålene til å starte en diskusjon blant elevene om hvordan kjørebasen kan utføre lignende oppgaver som robotene i LEGO fabrikken:
- Tror du kjørebasen kan brukes til å utføre lignende oppgaver som robotene i LEGO fabrikken?
- Hvilke utvidelser fra de tidligere leksjonene kan være nyttig for disse oppgavene?
Prosjektoversikt
Utform og bygg utvidelser til kjørebasen og programmer den til å:
- gripe kuben og frakte den så nært som mulig til midten av målsirkelen, og deretter slippe den.
- oppdage og følge linjen, og stoppe så nært som mulig til det store objektet uten å berøre det.
Byggetips
Åpne løsninger
Dette prosjektet er utformet slik at hvert lag kan ha en unik løsning. Bruk disse spørsmålene slik at elevene starter en idémyldring for å løse prosjektoversikten:
- Hvordan kan roboten navigere til midten av dropp-sonen?
- Hvordan kan roboten slutte å følge linjen så nært som mulig til det store objektet?
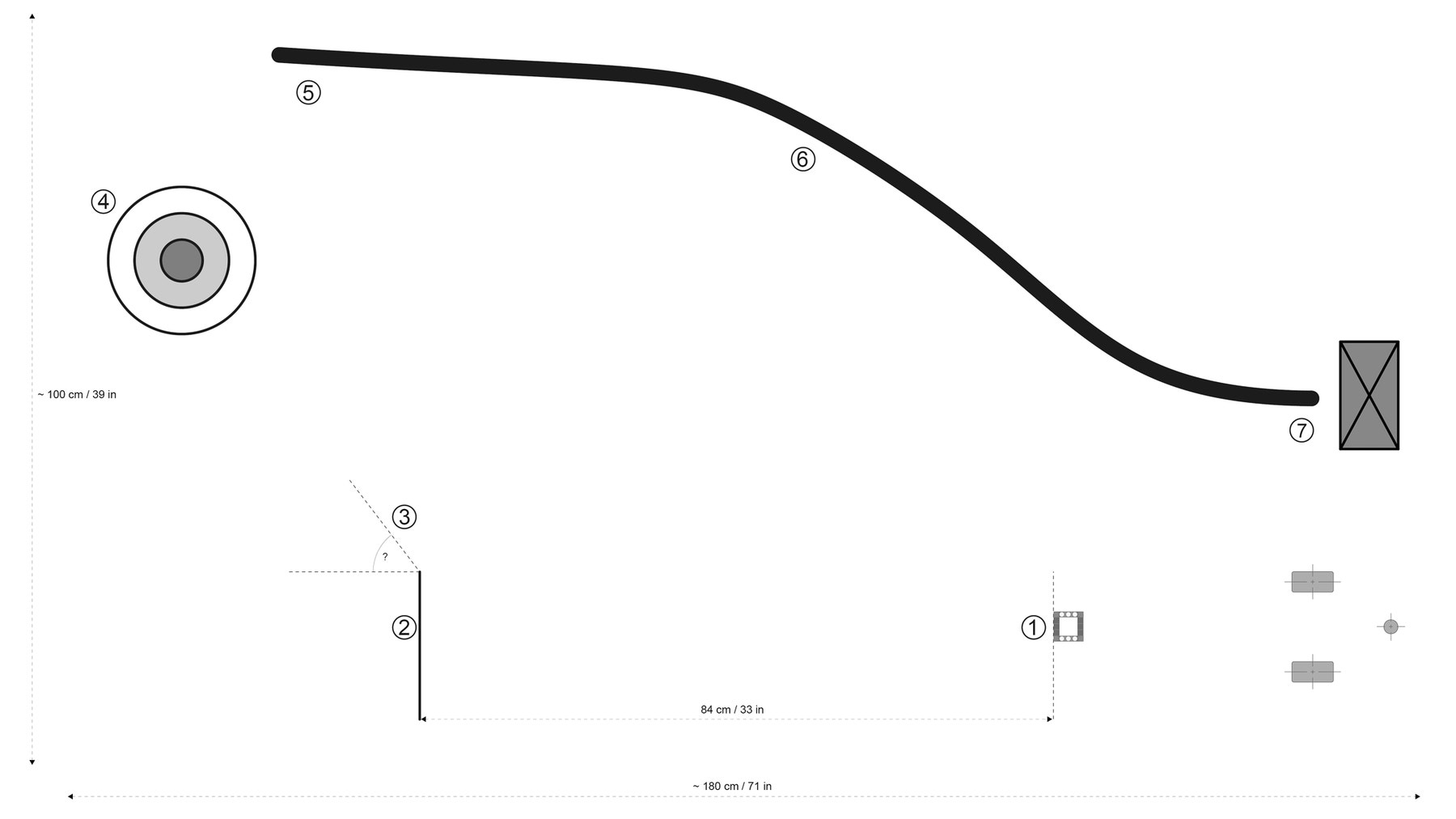
Ordne fabrikkbanen
For å lage banen som er illustrert nedenfor, trenger elevene svart tape, tusjer, et målebånd, kuben og et stort objekt som plasseres i enden av den svarte linjen. De angitte målingene er bare ment som forslag. Eksempelløsningen og løsningsprogrammet er imidlertid basert på disse målingene.
Eksempelløsning
Eksempelløsningen kombinerer følgende utvidelser:
Bruke gyrosensoren
Gyrosensoren må stå helt stille mens den plugges inn i EV3-klossen og i løpet av oppstarten av EV3-klossen. Hvis vinkelavlesningen til gyrosensoren endres mens kjørebasen står stille, plugger du sensoren ut og deretter inn igjen.
Programmeringstips
Løsningsprogram

Tilpasning og variasjon
Forenkle denne leksjonen ved å:
- arbeide sammen med elevene for å hjelpe dem forstå hvordan de slutter å følge linjen når det store objektet oppdages
- foreslå at elevene gjennomgår de tidligere leksjonene i dette emnet
- la elevene kjøre mot det store objektet uten å følge linjen
- oppmuntre til læring i grupper og opplæring
Ta denne leksjonen til neste nivå ved å:
- utfordre elevene til å kjøre fremover nøyaktig 84 cm/33 tommer etter å ha grepet kuben, og deretter bruke gyrosensoren til å vende roboten mot målsirkelen
- bruke tape med andre farger enn de som ble brukt i Farger og linjer-leksjonen.
Vurderingsmuligheter
Observasjonssjekkliste for lærer
Lag en skala som stemmer overens med behovene dine, for eksempel:
- Delvis fullført
- Fullstendig fullført
- Overgikk forventningene
Bruk følgende kriterier for å evaluere elevenes arbeid:
- Elevene utformet en robot som oppfyller kravene i prosjektoversikten.
- Elevene utviklet kreative løsninger og vurderte flere løsninger.
- Elevene arbeidet sammen som et lag for å fullføre utfordringen.
Egenvurdering
Be hver elev om å velge klossen de mener beskriver arbeidet deres på best måte.
- Bronse: Jeg gjorde så godt jeg kunne under vanskelige forhold.
- Sølv: Jeg hadde et par uhell underveis, men jeg fullførte likevel én av oppgavene.
- Gull: Jeg fullførte begge oppgavene med gode resultater.
- Platina: Jeg fullførte ikke bare begge oppgavene, men jeg la også til funksjoner som var originale og effektive.
Flere ideer til norskundervisningen
For å integrere utvikling av språkferdigheter ber du elevene om å:
- lage en presentasjon eller en video som fremhever robotens funksjoner og ytelse
- lage en presentasjon som forklarer noen viktige funksjoner i programmet
Merk: Dette kommer til å ta mer tid enn en vanlig økt.
Lenker til karrieremuligheter
Elevene som likte denne leksjonen, kan også være interessert i å utforske disse karrieremulighetene:
- Informasjonsteknologi (dataprogrammering)
- Produksjon og maskinteknikk (forprosjektering)
- Naturfag, teknologi, maskinteknikk og matematikk (maskinteknikk og teknologi)
Lærerstøtte
Elevene kommer til å:
- demonstrere sine ferdigheter i å løse en utfordring
LEGO® MINDSTORMS® Education EV3 grunnsett
EV3 Classroom-appen
Svart tape
Tusjer
Målebånd
Et stort objekt
Vinkelmåler (valgfritt)
Kompetansemål naturfag etter 7. trinn
- skille mellom observasjoner og slutninger, organisere data, bruke årsak-virkning-argumenter, trekke slutninger, vurdere feilkilder og presentere funn
- utforske, lage og programmere teknologiske systemer som består av deler som virker sammen
- reflektere over hvordan teknologi kan løse utfordringer, skape muligheter og føre til nye dilemmaer
Kompetansemål naturfag etter 10. trinn
- analysere og bruke innsamlede data til å lage forklaringer, drøfte forklaringene i lys av relevant teori og vurdere kvaliteten på egne og andres utforskinger
- bruke programmering til å utforske naturfaglige fenomener
Kompetansemål matematikk etter 6. trinn
- formulere og løyse problem frå sin eigen kvardag som har med desimaltal, brøk og prosent å gjere og forklare eigne tenkjemåtar
Kompetansemål matematikk etter 7. trinn
- logge, sortere, presentere og lese data i tabellar og diagram og grunngi valet av framstilling
Kompetansemål matematikk etter 8. trinn
- lage og løyse problem som omhandlar samansette måleeiningar
- utforske korleis algoritmar kan skapast, testast og forbetrast ved hjelp av programmering