Hoeken en patronen
De rijbasis maakt gebruik van motor-encoders om draaibewegingen te maken.

Dit werkt in principe prima, maar als de fabrieksvloer net is schoongemaakt, glijden de wielen van de rijbasis weg waardoor hij de weg kwijtraakt. Met een gyrosensor kan de rijbasis zijn positie bepalen en de weg eenvoudig terugvinden.
In welke situaties is het handig dat een robot richtingsveranderingen kan detecteren om te navigeren?
Bouw deze uitbreiding.
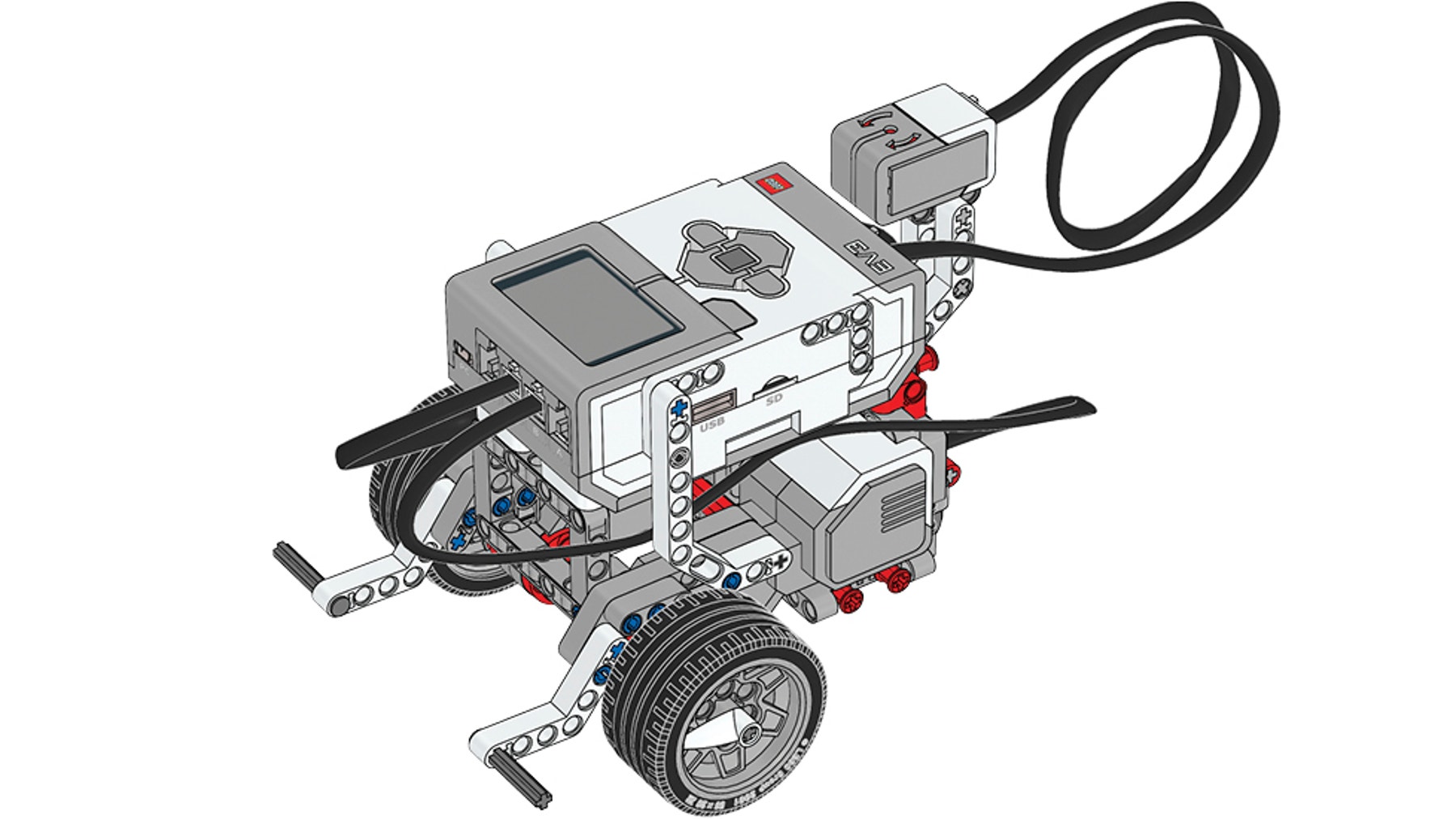
De gyrosensor uitbreiding kan worden gebruikt om een zorgvuldig uitgestippelde route nauwkeurig te volgen. Bouw deze voor de rijbasis.
Probeer deze programmeerstacks een voor een uit.


Wat zie je?
Hoe kun je met My Blocks codes ordenen en hergebruiken?
Jouw beurt!

Gebruik blokken van de programmeerstacks die al klaar zijn op het programmeerveld om een programma te maken waarmee je de rijbasis een hoek van 90 graden kan laten maken, hem vooruit kan laten rijden en hem een specifiek patroon kan laten volgen.
Hoog tijd voor een uitdaging!

Gebruik de gyrosensor en My Blocks om de rijbasis zo te programmeren dat hij drie keer een vierkant maakt en vervolgens in een driehoek gaat rijden.
Hoe heb je het gedaan?
Wat heb je goed gedaan? Is er iets wat je beter had kunnen doen?
Cool! Je hebt je programma's goed geordend!