Comutador
Use o bloco de Comutação para tomar decisões dinâmicas com base nos sensores.
Construa
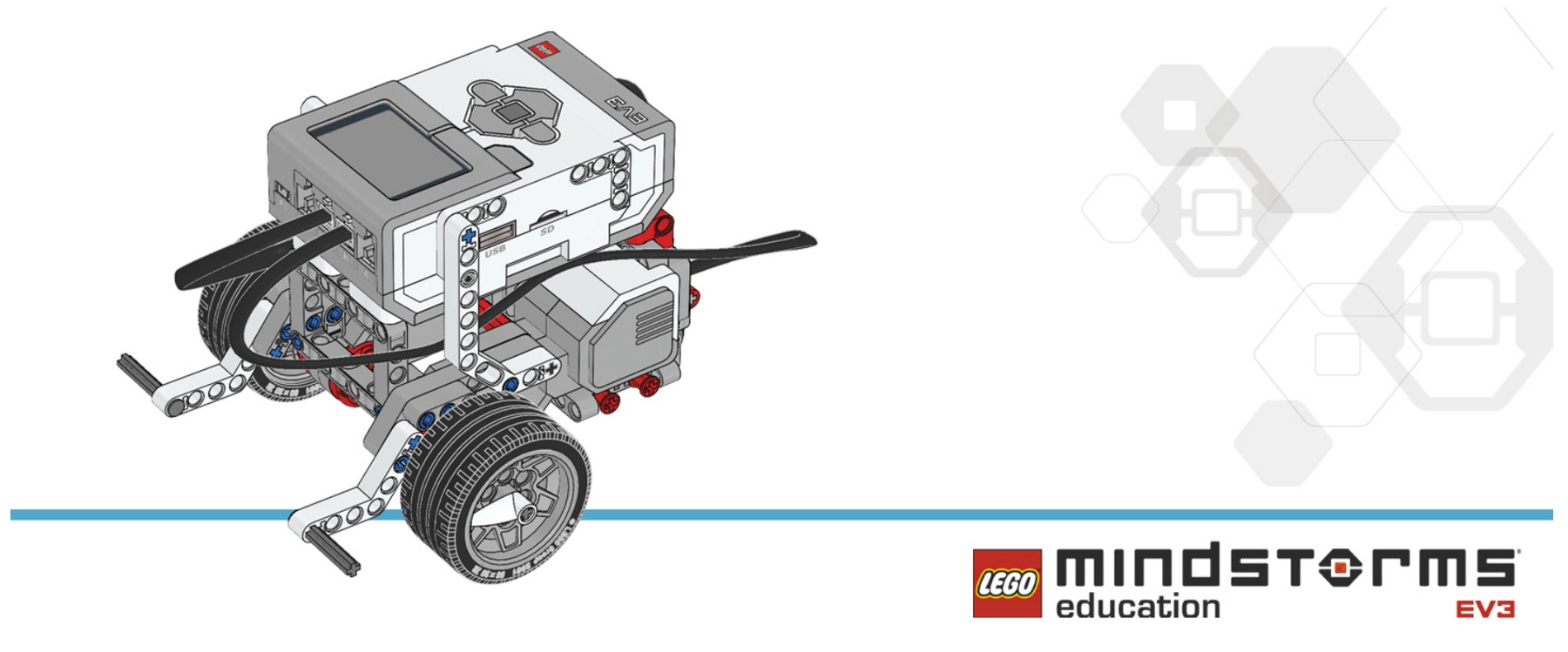
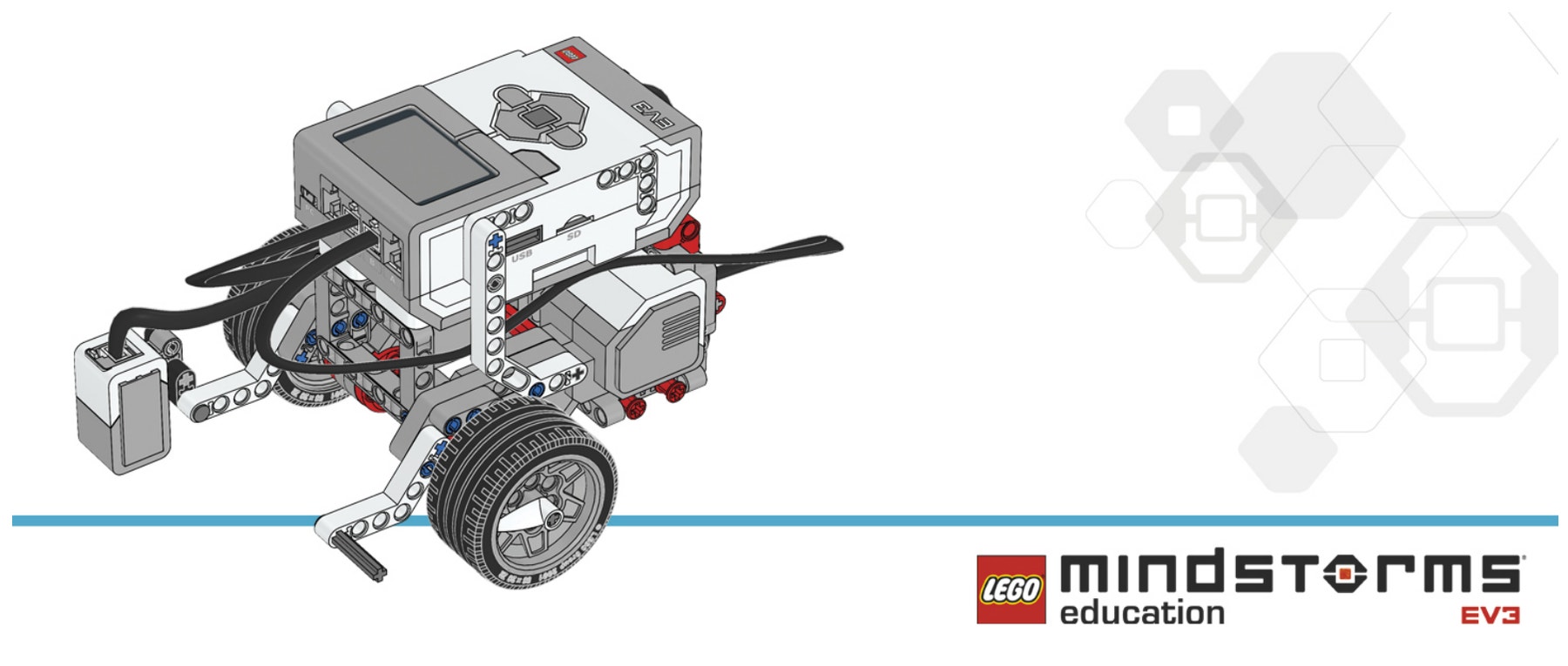
Construir o modelo da Base Motriz e o Módulo Para Baixo do Sensor de Cor.
Teste
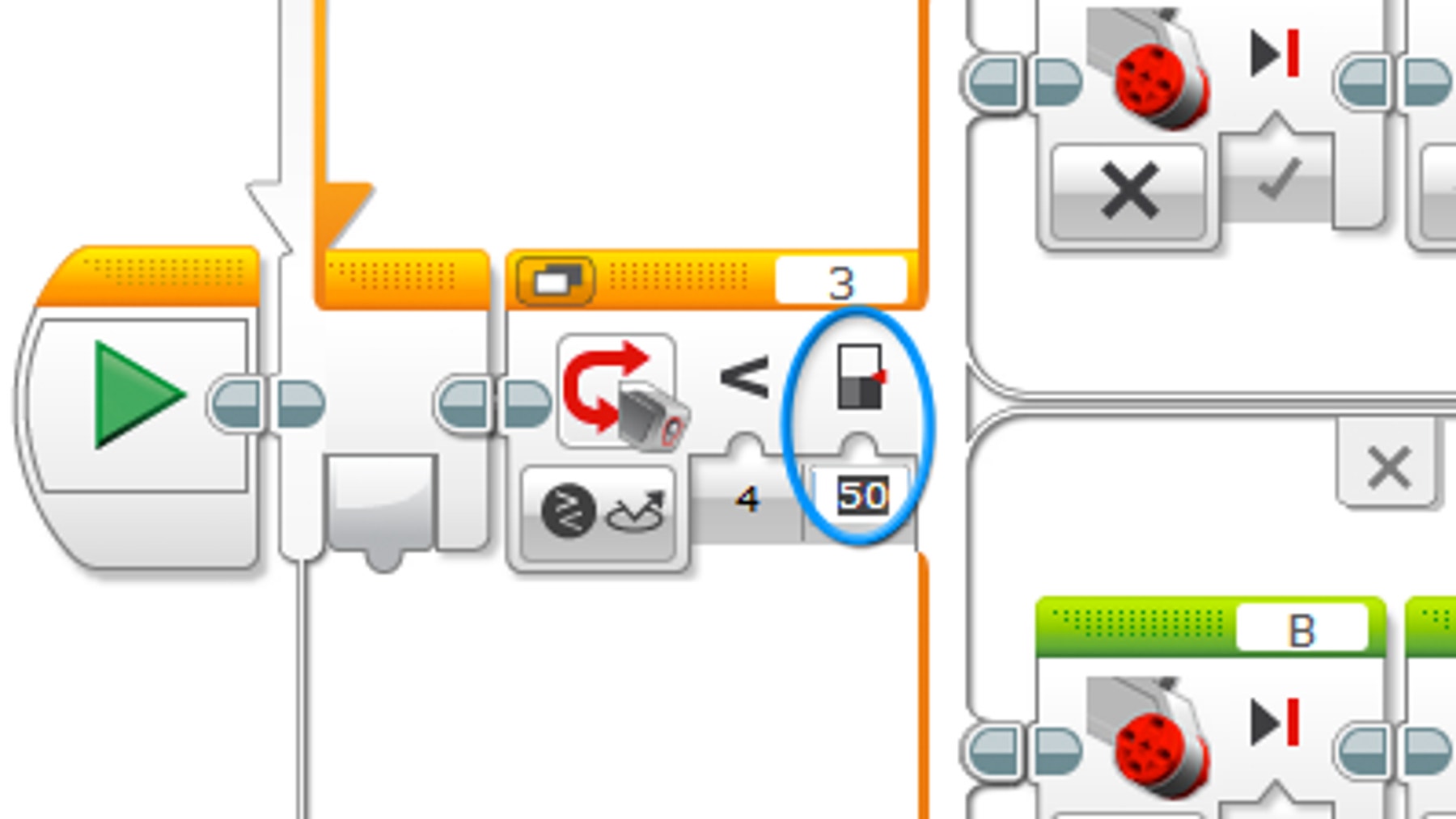
Recrie o programa mostrado e, a seguir, baixe e execute para testar.
Dica
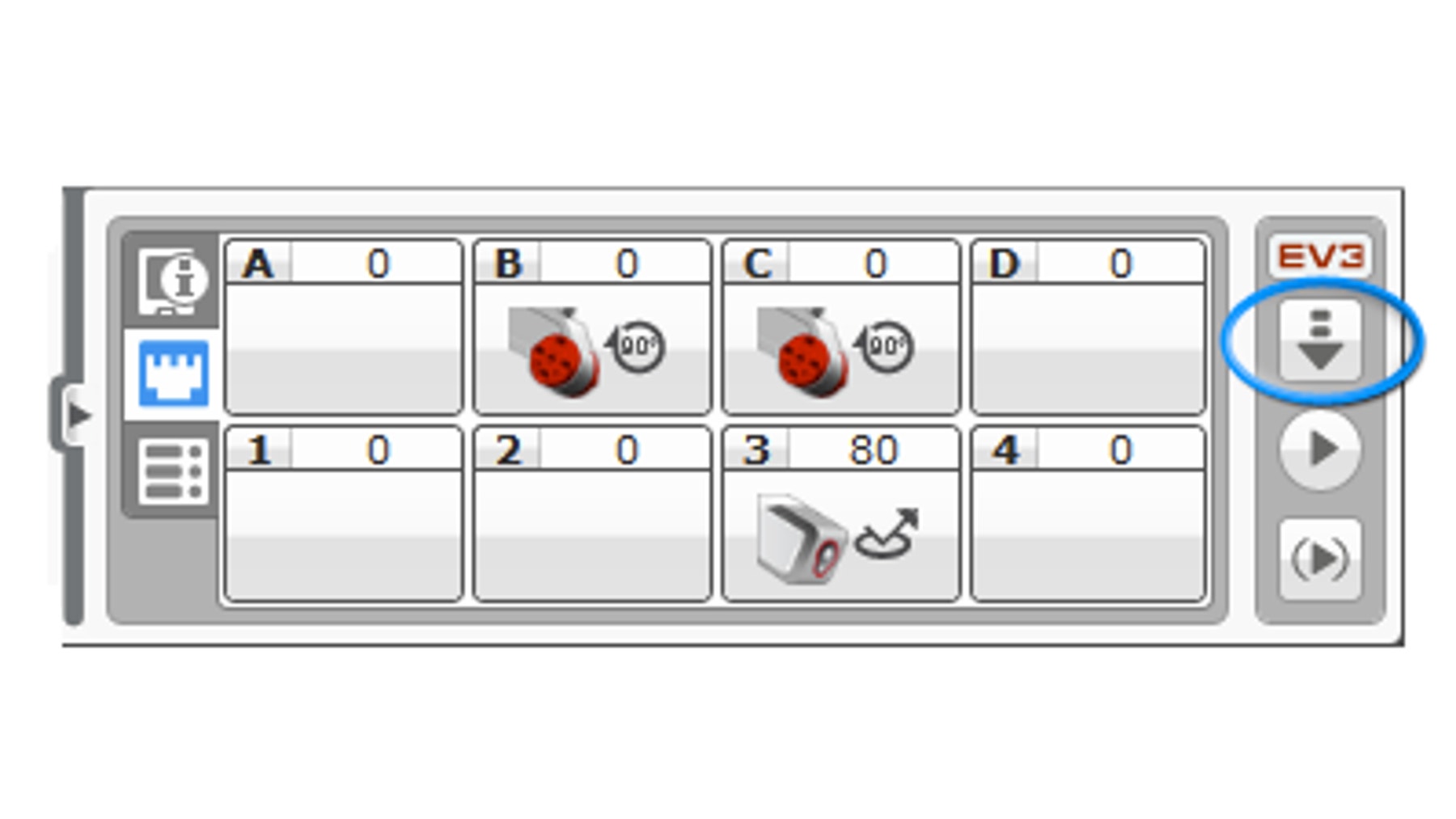
O aplicativo de visualização da porta do Bloco EV3 também pode ser usado para visualizar leituras de sensores em tempo real.
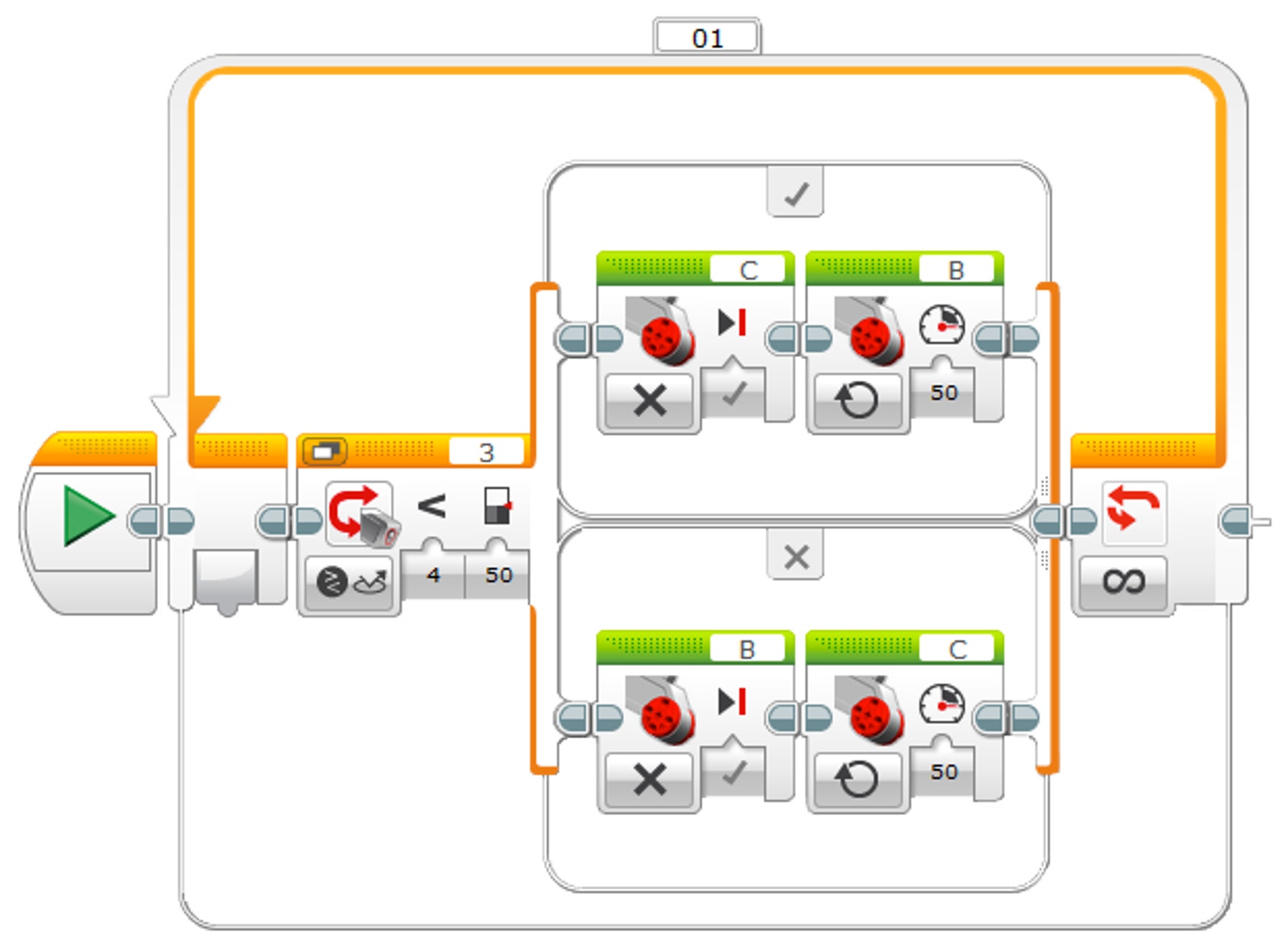
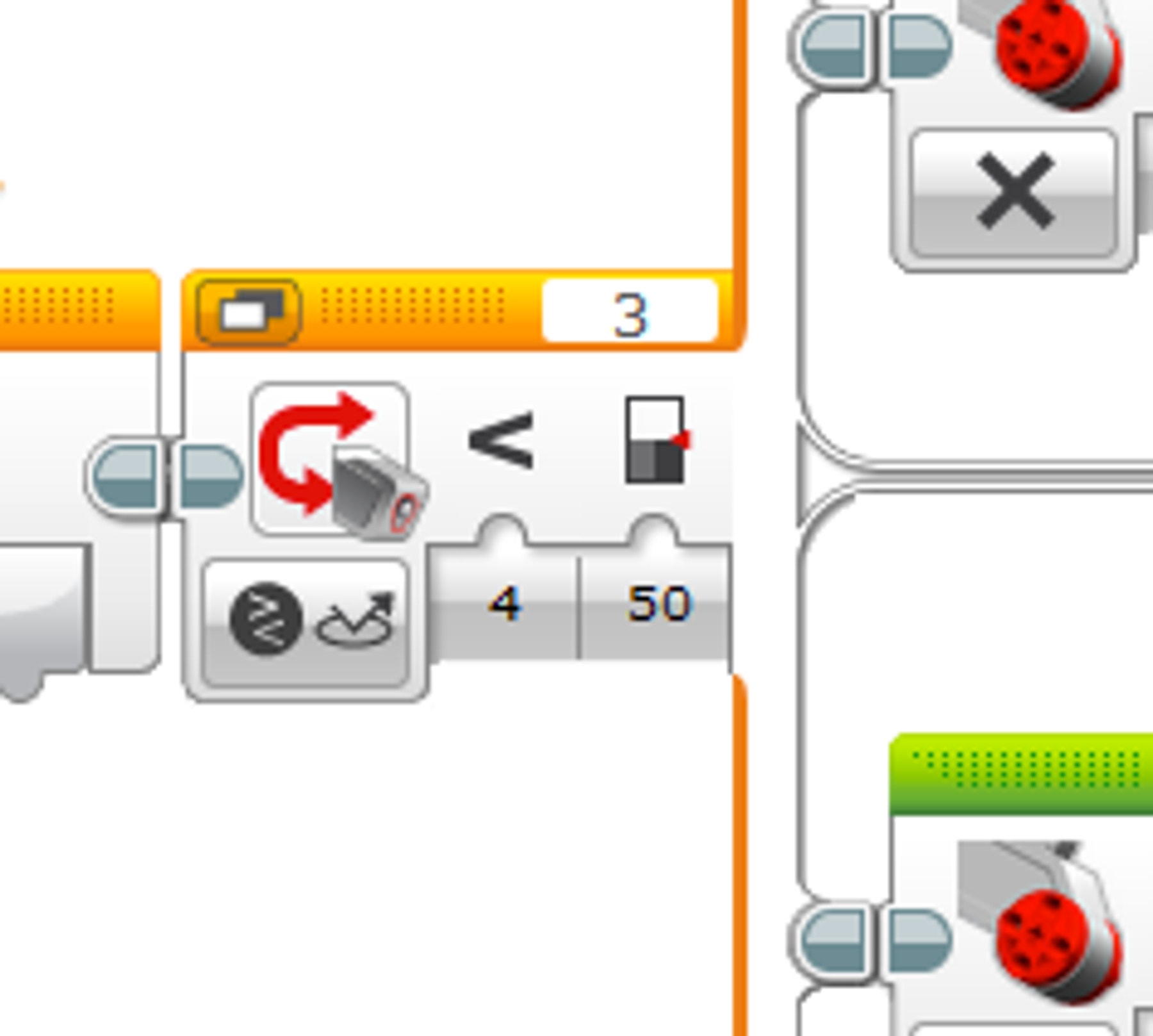
Resumo do Programa
Iniciar
Ciclo – Ilimitado
Comutação – Sensor de Cor – Comparar Intensidade da Luz Refletida
Intensidade[Menor que, 50]
Se Verdadeiro: Motor Grande C – Desligado
Se Verdadeiro: Motor Grande B – Ligado
Se Falso: Motor Grande B – Desligado
Se Falso: Motor Grande C – Ligado
Definindo um Limite
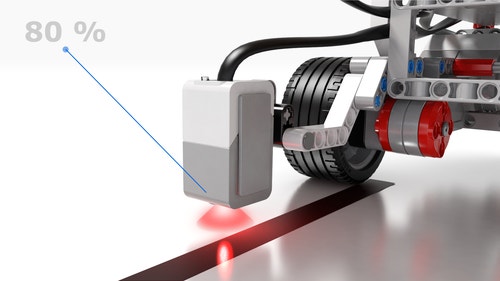
Nas páginas seguintes você irá medir os níveis de luz e escuridão a partir do Sensor de Cor e em seguida usar esses números para encontrar a média, que irá se tornar o limite de sensibilidade à luz do Sensor de Cor.
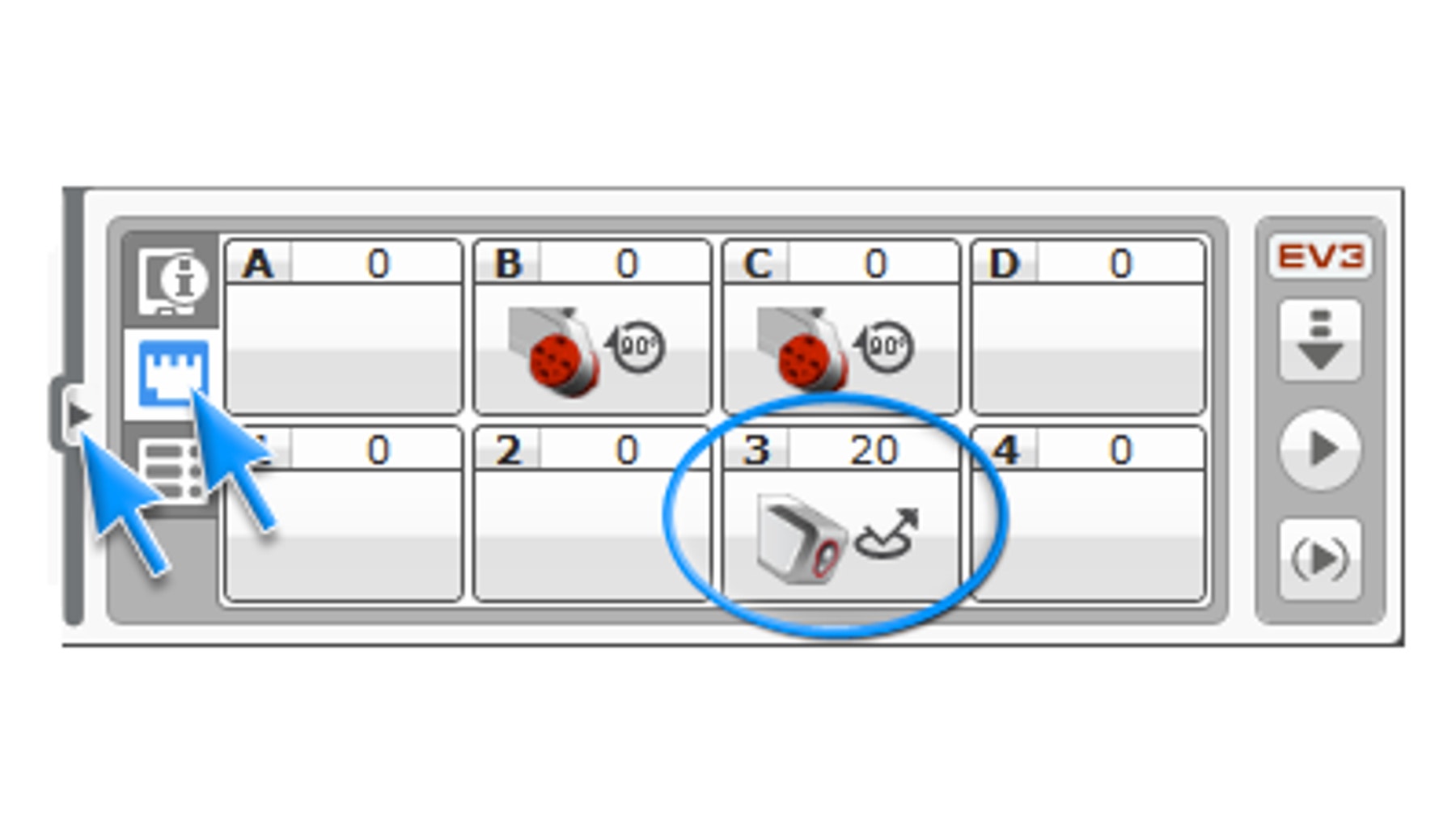
Primeiro, mova o Sensor de Cor sobre a linha escura.

Em seguida, abra a Página de Hardware e anote o valor mostrado na Porta 3. Este é o valor mínimo (x).
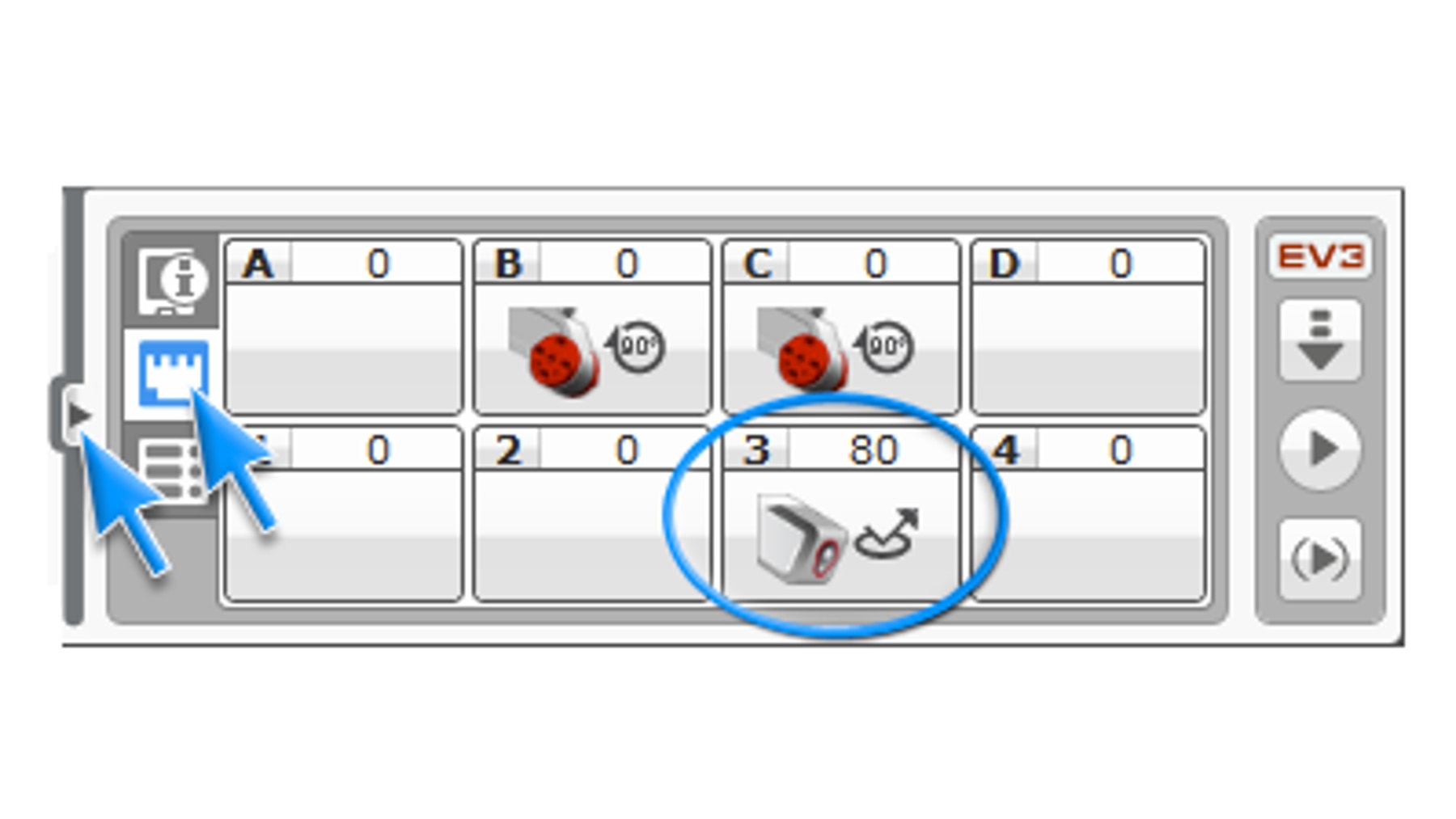
Agora, mova o Sensor de Cor para longe da linha escura.
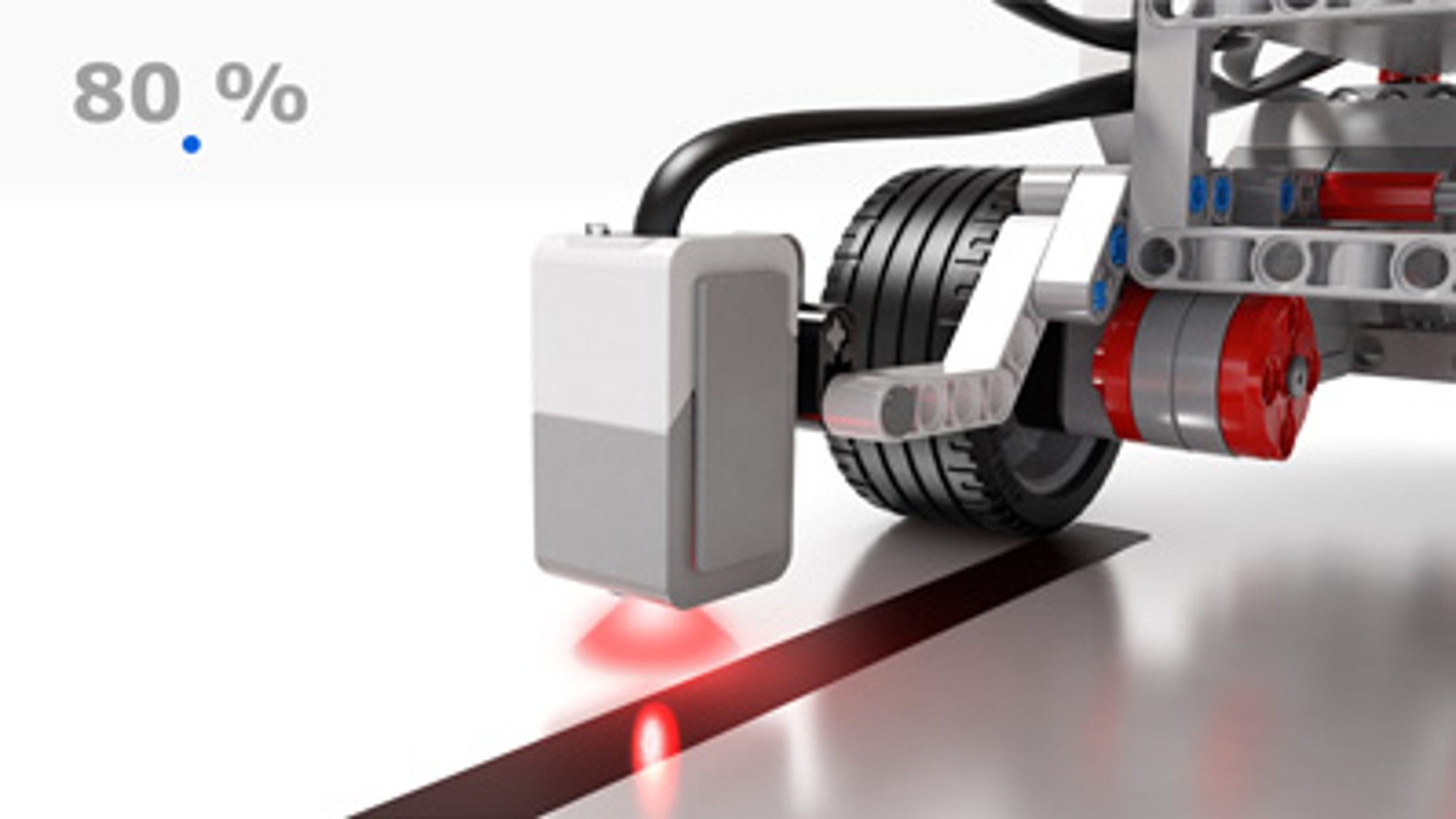
Anote o valor mostrado na Porta 3. Este é o valor máximo (y).
Para definir o limite, calcule a equação (x+y)/2 e insira o resultado no bloco Aguardar (seu valor pode ser diferente do exemplo mostrado).
Em seguida, baixe o programa.
Modifique
Agora é a sua vez! Teste se a sua Base Motriz funciona quando quiser seguir uma linha de cor mais clara! Se não, tente configurar o limite novamente.
Solução de Problemas
Em algum ponto, a luz do sensor refletindo fora da linha irá exceder o limite, fazendo com que a Base Motriz ande em círculo. Se isso ocorrer, altere o valor do limite.
Dica
Se a diferença entre os valores x e y for muito pequena, a linha não será detectada. Se isso ocorrer, tente recalibrar o sensor.
O que vem depois?

Suporte ao Professor
Os alunos irão:
Use o bloco de Comutação para tomar decisões dinâmicas com base nos sensores.
Conjunto Principal LEGO MINDSTORMS EV3
Software EV3 ou App de Programção