工場で働くロボット
2つのタスクを実行する拡張パーツを設計してドライビングベースに搭載し、プログラミングします。

レッスンプラン
1.準備
- EV3 Classroom アプリの生徒用資料を読み、学習課題をよく理解しておきましょう。
- 工場や倉庫で自律走行ロボットが行うタスクについて調べておきます。
- このレッスンでは、工場内の進路を作るのに黒の粘着テープとマーカー、メジャー、大きな障害物が必要です。
- このチャレンジを始める前に、このユニットのほかのレッスンをすべて完了しておくことをおすすめします。
- このレッスンを完了するには、ドライビングベースを組み立てておく必要があります (所要時間約30分)。
- 2時間連続で授業を行うことができない場合は、このレッスンを数回に分けて行えるように授業計画を立ててください。
パート A.
2.興味付け (10分)
- 「ディスカッションを活性化させる」セクションのアイデアを参考に、生徒の学習への関心を喚起します。
- 生徒にペアを組ませます。
3.探求 (35分)
- ブレインストーミングをさせ、ドライビングベースが直方体ブロックをつかんで移動し、目標地点の円 (積み降ろしゾーン) の中央で放すようにプログラムを拡張するためのアイデアを出してもらいます。
- 複数のプロトタイプを制作し、本体の構造とプログラムの両方で複数のアイデアを試すよう促してください。
- 生徒が解決方法に選んだデザインを組み立て、テストする時間を設けてください。
パート B
4.説明 (10分)
- 線に沿って走行し、大きな物体の前で停止するロボットの主な機能についてディスカッションを促してください。
5.仕上げ (35分)
- ブレインストーミングをさせ、ドライビングベースが線に沿って走行し、大きな物体にできる限り近い位置で停止するようにプログラムを拡張するためのアイデアを出してもらいます。
- チャレンジに挑戦する準備ができるまでロボットの制作を続けさせてください。
- 清掃の時間も忘れずに確保してください。
6.評価
- それぞれの生徒に取り組みを評価して伝えます。
- 各チームのデザインの独創性とチームワークを評価します。
- 評価の際は、以下に提示するルーブリックを参考にすると良いでしょう。
ディスカッションを活性化させる
レゴ® 工場で使われている車輪付き自律走行ロボットが行っているタスクの1つが、作業ステーション間の箱の移動です。完全に自律走行で、バッテリー残量が低くなると自分で充電ステーションまで移動することもできます!壁や従業員、ほかのロボットに衝突することなく、タスクを効率的にこなしています。

以下のような質問をして、ドライビングベースがレゴ工場のロボットと同じようなタスクを実行できるようにするにはどうすればよいか、ディスカッションを促してください:
- ドライビングベースでレゴ工場のロボットと同じようなタスクを実行できると思いますか?
- これまでのレッスンに出てきた拡張パーツのうち、このようなタスクに役立つのはどれでしょうか?
課題設定
以下のタスクを実行できる拡張パーツを設計し、ドライビングベースに搭載しましょう:
- 直方体ブロックをつかんで目標地点の円まで運び、中央にできる限り近い位置で放す。
- 線を検出して、それに沿って走行し、大きな物体に接触することなく、できる限り近い位置で停止する。
組み立てのヒント
オープンエンドの解決方法
このプロジェクトは、各チームが独自の解決方法を考えることができるようにデザインされています。以下のような質問をしてチームごとにブレインストーミングをさせ、課題を解決するアイデアを出してもらいましょう:
- どうすればロボットは積み降ろしゾーンの中央まで移動できるでしょうか?
- ロボットが大きな物体にできる限り近い位置で線に沿った走行を停止するにはどうすればよいでしょうか?
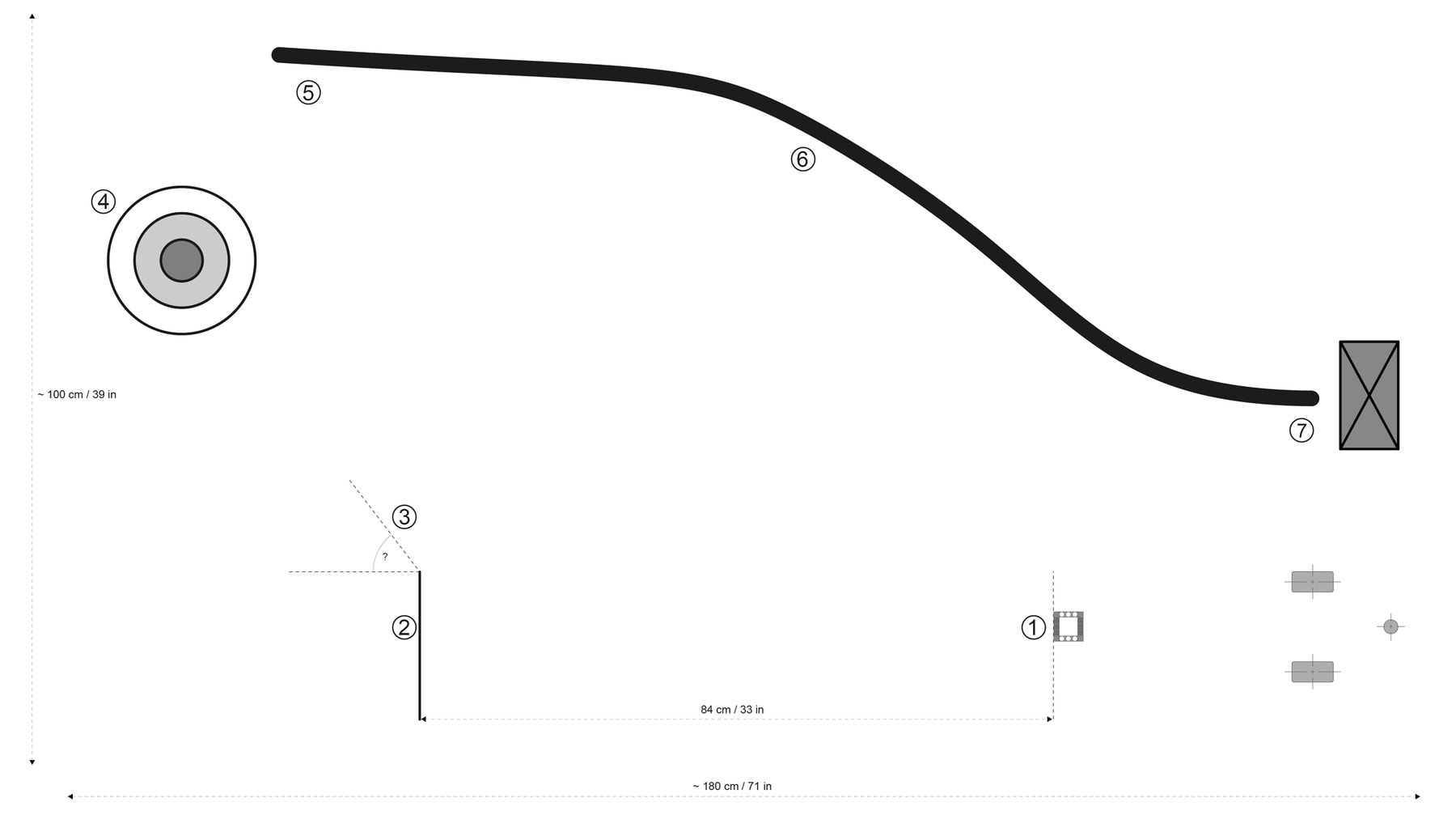
工場内の進路を準備する
黒の粘着テープ、マーカー、メジャー、直方体ブロック、黒い線の最後に置く大きな障害物を生徒に配布し、下の図に示すコースを作成します。図中の数字は目安であり、すべて同じにする必要はありません。ですが、製作例とプログラム例は図のコースに基づいています。
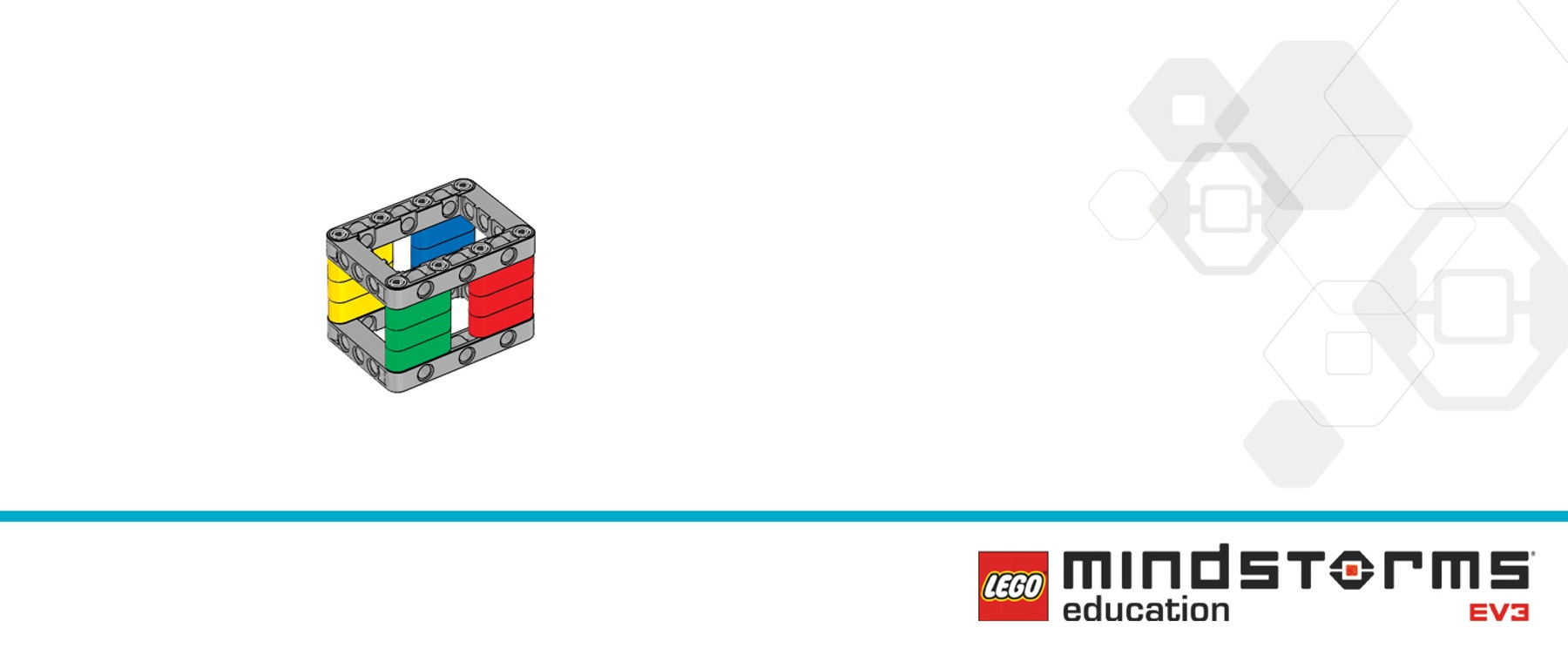
製作例
この製作例では以下の拡張パーツが使用されています:
ジャイロセンサーを使う
ジャイロセンサーは、EV3 ブロックに接続している間やEV3 ブロックの起動中は、完全に静止した状態を保つ必要があります。ドライビングベースが静止している間にジャイロセンサーの角度読み取り値が変化した場合は、センサーを接続し直してください。
プログラミングのヒント
プログラム例

個別化
学習に困る生徒が多い場合は、次のように学習方法を工夫してみましょう:
- 大きな障害物を検出したらロボットが線に沿った走行を停止するプログラムを生徒と一緒に考える。
- ユニット内のこれまでのレッスンをふりかえるよう提案する。
- 線に沿った走行はせずに、大きな障害物に向かって前進するだけにする。
- 生徒同士で教え合うよう促す。
この学習で物足りない場合は、次のように学習方法を工夫してみましょう:
- 直方体ブロックをつかんでから正確に84 cm前進し、ジャイロセンサーを使って目標地点の円の方を向くようにプログラムできるか挑戦させる。
- レッスン「色と線」で使用したのとは違う色の粘着テープを使う。
学習評価
この学習におけるルーブリックの例
次のルーブリックを参考に、評価規準や判定基準を作成しましょう。
1.課題を部分的にこなした。
2.課題を十分にこなした。
3.期待を上回る達成度であった。
以下の成功基準を使用して、生徒の進度を評価します。
- 課題設定の条件を満たすロボットをデザインすることができた。
- 独創的な解決方法を考え、複数の解決方法を検討することができた。
- チームとして協力しながらチャレンジを完了することができた。
自己評価
それぞれの生徒に、自分の成果に最もよくあてはまるレベルを選ばせます。
- ブロンズ:厳しい条件下で全力を尽くすことができた。
- シルバー:途中でいくつか失敗はあったが、タスクを1つ完了することができた。
- ゴールド:両方のタスクを高い完成度で完了することができた。
- プラチナ:両方のタスクを完了できただけでなく、自分で考えた効果的な機能を追加することができた。
国語の発展課題
言語能力の発達を促すために、生徒に以下のタスクに取り組んでもらいます:
- ロボットの特徴と性能をまとめたプレゼンテーションまたはビデオを制作する。
- 自分たちが作ったプログラムの重要ポイントを説明するプレゼンテーションを制作する。
注:これにより、さらに長い授業をすることができます。
職業適性
この授業を楽しむことができた生徒は、以下の進路について興味がある可能性があります。
- コンピュータープログラミング
- プレ・エンジニアリング
- 科学、技術、工学及び数学(科学技術)
教師用サポート
学習内容:
- スキルを応用してチャレンジを解決する
教育版® レゴ マインドストーム® EV3 基本セット
EV3 Classroom アプリ
黒の粘着テープ
マーカー
メジャー
大きな分度器 (オプション)
中学校
数学
- C 関数:比例,反比例
- B 図形:平面図形
理科
- 第1分野:(1)身近な物理現象
技術・家庭
- C エネルギー変換の技術:(2)エネルギー変換の技術による問題の解決
- D 情報の技術:(1)生活や社会を支える情報の技術,(3)計測・制御のプログラミングによる問題解決
総合的な学習の時間
- (3)探究的な学習に主体的・協働的に取り組むとともに,互いのよさを生かしながら,積極的に社会に参画しようとする態度を養う
高校
情報
- 情報Ⅰ:(3)コンピュータとプログラミング
- 情報Ⅱ:(5)情報と情報技術を活用した問題発見・解決の探究
総合的な探究の時間
- (3) 探究に主体的・協働的に取り組むとともに,互いのよさを生かしながら,新たな価値を創造し,よりよい社会を実現しようとする態度を養う




