Objekter og hindringer
Bruk ultralydsensoren til å registrere kuben og reagere på den.
Leksjonsplan
1. Forberede
- Les gjennom elevmaterialet i EV3 Classroom-appen.
- Samle inn informasjon om hvordan ultralydsensoren fungerer.
- Du trenger et målebånd for å måle eksakt hvor du skal plassere kuben i denne leksjonen.
- For å fullføre denne leksjonen, må elevene ha bygget kjørebasemodellen. Det tar omtrent 30 minutter.
2. Engasjere (5 min.)
- Bruk ideene i Starte en diskusjon-delen nedenfor til å engasjere elevene i en diskusjon knyttet til denne leksjonen.
- Del klassen inn i par.
3. Utforske (20 min.)
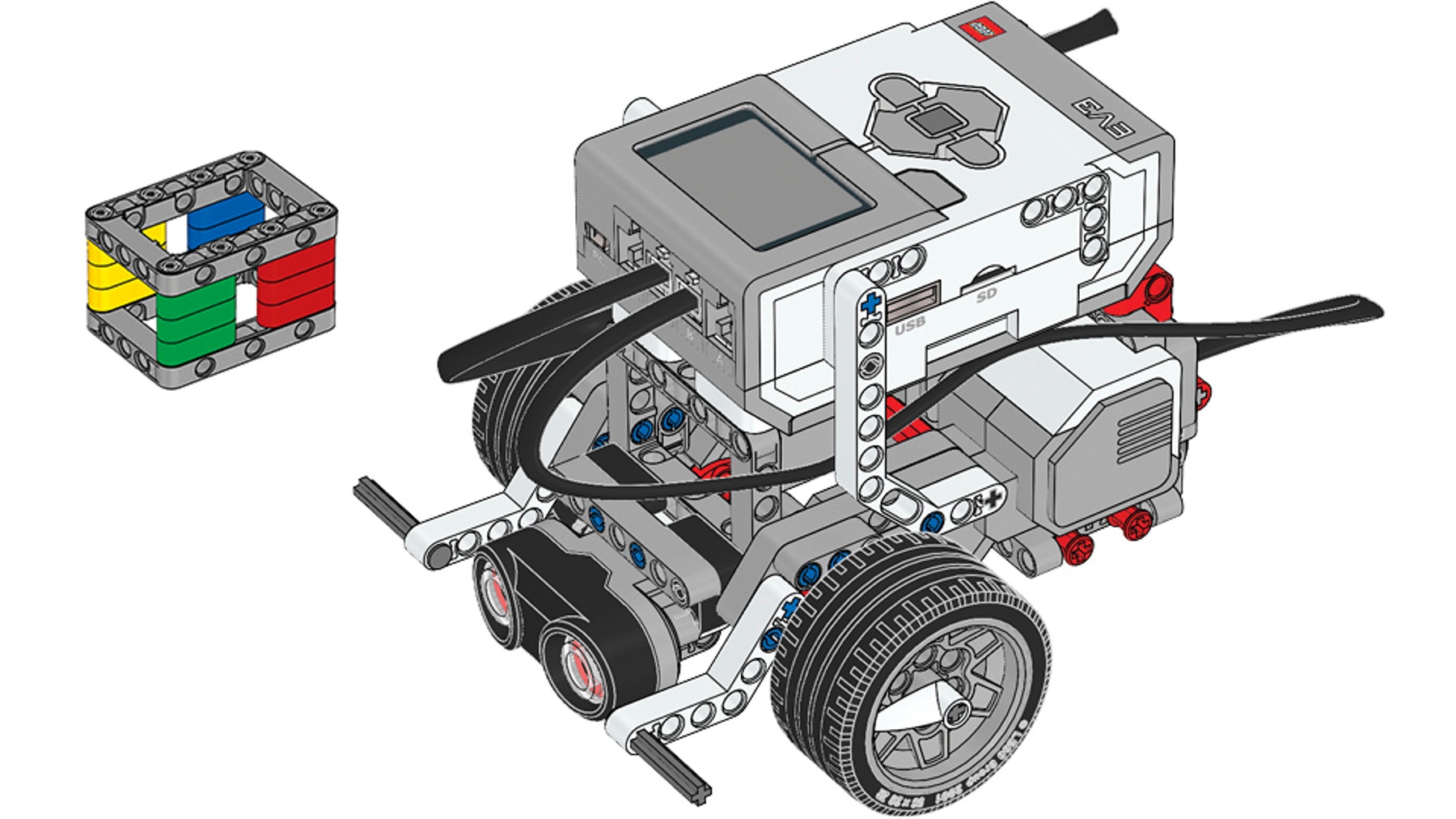
- Be hvert par bygge kuben og ultralydsensorutvidelsen for kjørebasen.
- Gi elevene litt tid til å bruke programsekvensen for å utforske hvordan ultralydsensoren kan brukes.
4. Forklare (5 min.)
- Start en diskusjon om hvordan ultralydsensoren kan brukes til å måle distanse.
5. Utdype (15 min.)
- Utfordre elevene til å programmere kjørebasen til å pipe raskere eller høyere når den kommer nærmere kuben.
- Ikke glem å gi elevene nok tid til å rydde opp.
6. Evaluere
- Gi tilbakemelding på elevenes arbeid.
- Du kan bruke de vedlagte vurderingsrubrikkene for å forenkle prosessen.
Start en diskusjon
Modulære roboter er nyttige fordi de kan utvides og konfigureres til å utføre et bredt spekter av oppgaver. Ved å legge til sensorer kan de reagere på miljøet slik at de gjør ting som å oppdage hindringer og unngå kollisjoner.

Bruk disse spørsmålene til å starte en diskusjon blant elevene om roboter som kan oppdage objekter:
- Vet du om noen roboter som kan oppdage objekter?
- Hvorfor er det nyttig for roboter å kunne oppdage objekter?
- Hva er ultralyd, og hvordan fungerer en ultralydsensor?
Byggetips
Programmeringstips
Hovedprogram

Mulig løsning

Tilpasning og variasjon
Forenkle denne leksjonen ved å:
- bruke ekstra tid på å forklare hvordan ultralydsensoren brukes
Ta denne leksjonen til neste nivå ved å:
- utfordre elevene til å programmere en selvstyrende robot som unngår hindringer
- be elevene om å endre fra ultralydsensoren til en trykksensor for å oppdage hindringer
Vurderingsmuligheter
Observasjonssjekkliste for lærer
Lag en skala som stemmer overens med behovene dine, for eksempel:
- Delvis fullført
- Fullstendig fullført
- Overgikk forventningene
Bruk følgende kriterier for å evaluere elevenes arbeid:
- elevene kan bruke ultralydsensoren til å oppdage et objekt.
- elevene kan endre parameterne til ultralydsensorblokkene for å oppdage forskjellige avstander.
- elevene kan utvide sitt program til å reagere dynamisk på den oppdagede avstanden.
Egenvurdering
Be hver elev om å velge klossen de mener beskriver arbeidet deres på best måte.
- Bronse: Jeg har brukt ultralydsensoren til å stoppe ved et objekt.
- Sølv: Jeg har brukt ultralydsensoren til å oppdage distansen til et objekt.
- Gull: Jeg har gjort det slik at ett aspekt av programmet reagerer dynamisk på avstanden til et objekt.
- Platina: Jeg har gjort det slik at flere aspekter av programmet reagerer dynamisk på avstanden til et objekt.
Flere ideer til norskundervisningen
For å integrere utvikling av språkferdigheter ber du elevene om å:
- forberede og legge frem en presentasjon om hvordan ultralydsensorer fungerer.
Merk: Dette kommer til å ta mer tid enn en vanlig økt.
Lenker til karrieremuligheter
Elevene som likte denne leksjonen, kan også være interessert i å utforske disse karrieremulighetene:
- Produksjon og maskinteknikk (maskinteknikk)
- Produksjon og maskinteknikk (forprosjektering)
Lærerstøtte
Elevene kommer til å:
- bruke ultralydsensoren til å oppdage et objekt og reagere på det
Kompetansemål naturfag etter 7. trinn
- skille mellom observasjoner og slutninger, organisere data, bruke årsak-virkning-argumenter, trekke slutninger, vurdere feilkilder og presentere funn
- utforske, lage og programmere teknologiske systemer som består av deler som virker sammen
- reflektere over hvordan teknologi kan løse utfordringer, skape muligheter og føre til nye dilemmaer
Kompetansemål naturfag etter 10. trinn
- analysere og bruke innsamlede data til å lage forklaringer, drøfte forklaringene i lys av relevant teori og vurdere kvaliteten på egne og andres utforskinger
- bruke programmering til å utforske naturfaglige fenomener
Kompetansemål matematikk etter 6. trinn
- beskrive eigenskapar ved og minimumsdefinisjonar av to- og tredimensjonale figurar og forklare kva for eigenskapar figurane har felles, og kva for eigenskapar som skil dei frå kvarandre
- formulere og løyse problem frå sin eigen kvardag som har med desimaltal, brøk og prosent å gjere og forklare eigne tenkjemåtar
- måle radius, diameter og omkrins i sirklar og utforske og argumentere for samanhengen
Kompetansemål matematikk etter 7. trinn
- logge, sortere, presentere og lese data i tabellar og diagram og grunngi valet av framstilling
Kompetansemål matematikk etter 8. trinn
- lage og løyse problem som omhandlar samansette måleeiningar
- utforske korleis algoritmar kan skapast, testast og forbetrast ved hjelp av programmering