Make It Move With Wheels
Design, build and program robots that can think and move on their own - once you tell them how!

Connect
(30 minutes)
Use this video to:
- Connect students to real-life robots that move
- Connect students to physical science and mathematics principles: distance, speed, and other challenges for robot movement
- Consider how robots think; how they know where they are and what they need to do
- Inspire students to create their own robots that move
Make It Move Discussion
- Look at the ways that machines and robots move with and without wheels. Choose one example and trace how the movement transfers from one part to another.
This question challenges students to observe and describe how a robot physically moves. - Compare the way the two walking robots move. What do you notice about how they balance as they walk?
The ZI insect robot lifts one leg on one side but not on the other. The humanoid robot is maintains its balance in several ways (e.g., moving slowly, adjusting foot position, holding hands out and down to the side).
Design Brief
Design, build, and program a robot that can:
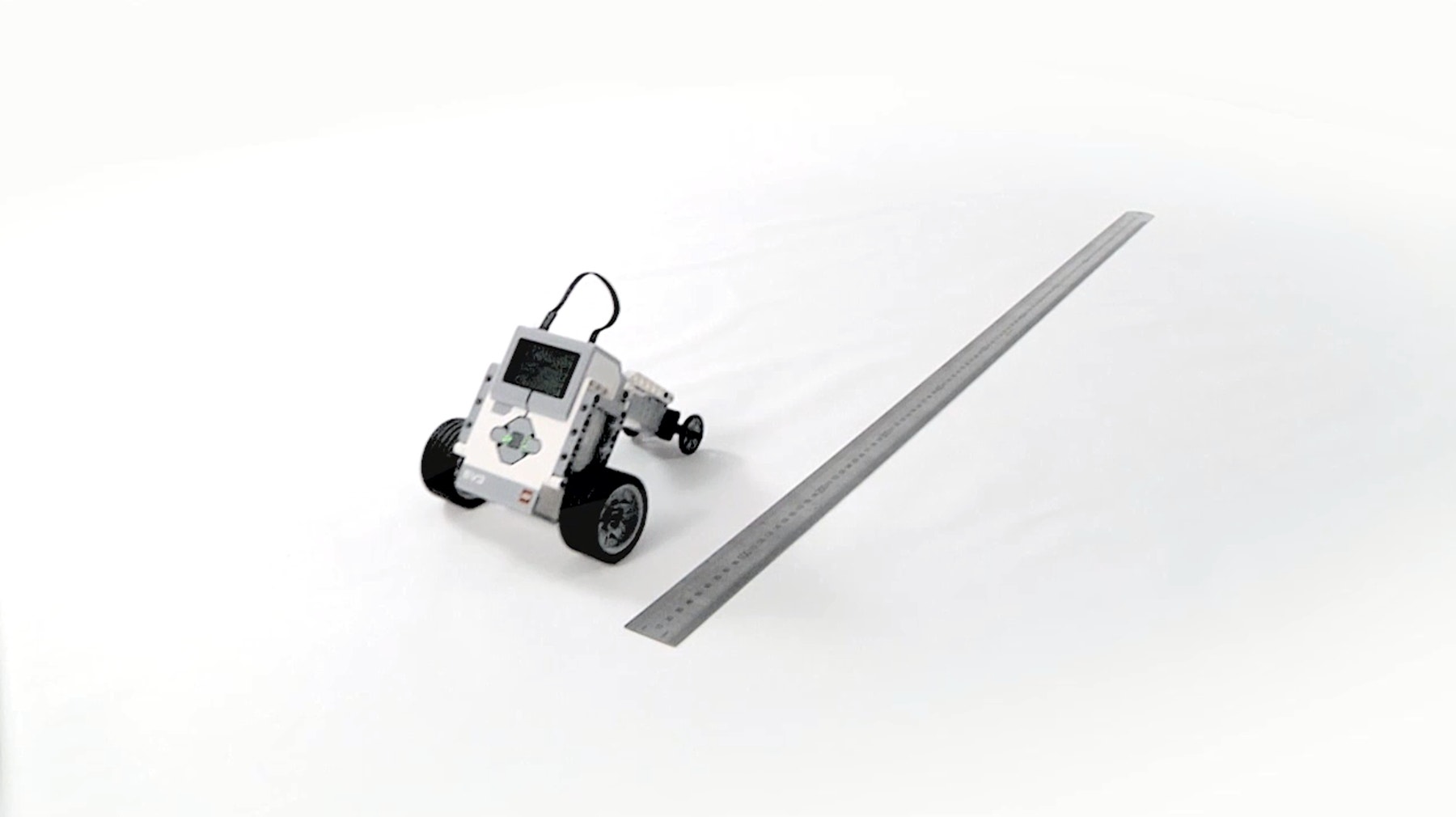
- Move itself a distance of 1 m
- Use at least one motor
- Use wheels for locomotion
- Display the distance it moved
Brainstorm
Encourage an active brainstorming process so that students develop their conceptual understanding. For example, encourage them to:
- Review the Robots In Action videos showing robots for inspiration
- Investigate the Key Concepts Measuring Distance project using the building and programming ideas included there
- Build some of the examples from Building Ideas and explore how they work;
- Personalize their robot or describe a context in which a robot that moves a specific distance is important (e.g., the Curiosity Rover robot that is exploring the planet Mars)
Building Ideas:
Select the Best Solution
Describe the solution that you have agreed to build and program.
Think about examples from your brainstorming discussion. Then explain why you chose this solution for the design brief. Encourage students to describe why they have chosen this solution. That way, when students are reviewing and revising, they will have specific information to use to evaluate their solution and decide whether or not it was effective.
Construct
(30 minutes)
Build and Program
Start building and programming your solution!
As you work on your solution, make sure students keep track of:
- Describe one part of your design that worked especially well.
- Describe one design change that you had to make.
- What will you try next?
Students can use images, video, text, sound, or weblinks to document their work.
Contemplate
(30 minutes)
Test and Analyze
How well does your solution satisfy the design brief?
Use a table to record data. Name the columns and rows, such as Trial Number, Distance Moved, and Observations.
Review and Revise
Take a moment to reflect on your robot solution.
- Does the robot calculate the distance accurately?
- How do you know?
- What are some ways that others have solved the problem?
- Describe two ways you could improve your robot?
Encourage students to look back at the design brief and at their own brainstorming notes and test data.
Communicate
Here are some ideas to suggest to students:
- Create a video of your project, especially your final presentation and your robot’s performance.
- Explain some important features of your software program.
- Produce a building guide for your model by taking a series of photographs as you deconstruct it.
- Include an image of your program with comments.
- Add a team photograph
Evaluate Design and NGSS Goals
You can use the included rubrics to evaluate skills progression of Design Engineering Projects.
- Students can review their design goals as well as their use of some NGSS practices using the provided rubric. Students can rate their level of work by adding a mark below the Bronze, Silver, Gold, or Platinum column.
- You may also choose to use the rubric to rate each team or student yourself.
Evaluate Creativity and Collaboration
Students can review their creative and collaboration processes using the provided rubric.
You may also choose to use the rubric to rate each team or student yourself.
Continue
(30 minutes)
Communicate
Here are some ideas to suggest to students:
- Create a video of your project, especially your final presentation and your robot’s performance.
- Explain some important features of your software program.
- Produce a building guide for your model by taking a series of photographs as you deconstruct it.
- Include an image of your program with comments.
- Add a team photograph
Evaluate Design and NGSS Goals
You can use the included rubrics to evaluate skills progression of Design Engineering Projects.
- Students can review their design goals as well as their use of some NGSS practices using the provided rubric. Students can rate their level of work by adding a mark below the Bronze, Silver, Gold, or Platinum column.
- You may also choose to use the rubric to rate each team or student yourself.
Evaluate Creativity and Collaboration
Students can review their creative and collaboration processes using the provided rubric.
You may also choose to use the rubric to rate each team or student yourself.
Sample Solution Overview
The Bevel Bot Solution is one example of many possible solutions for the Make It Move With Wheels project.
Sample Solution Building Ideas
The Bevel Gears Building Idea shows how to transfer motion at a 90° angle and gear down (decrease speed, increase force). The large wheels are not connected to a motor. They are used for stability and reducing friction.
Sample Solution Measuring Distance
Here is one way to figure out the distance a robot moves based on the motor rotations
- Measure the wheel diameter.
The small wheel is approximately 3 cm in diameter. - Find the circumference of the wheel.
Circumference = Diameter * pi
Circumference = 3 cm * 3.14 = 9.42 cm per wheel rotation - Calculate how many wheel rotations are required for the robot to move 100 cm.
100 cm ÷ 9.42 cm per rotation = 10.6 rotations - Adjust the motor rotations by the gear ratio.
Geared rotations = 10.6 rotations * 20 ÷ 12-gear ratio
Geared rotations = 10.6 rotations * 1.67 gear ratio = 17.7 geared rotations - In your program, add a Motor block, select motor rotations and enter the geared rotations value, 17.7.
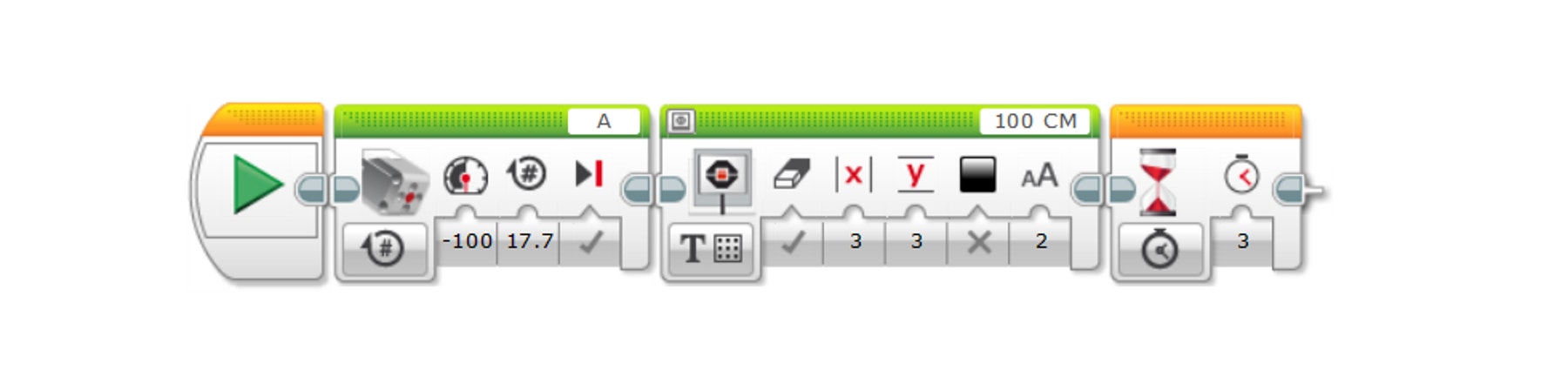
Sample Solution Program
This program:
- Turns on the Medium Motor at -100 (forward at full power on this model) for 17.7 rotations
- Displays 100 cm at coordinates (3, 3) so the text is centered in the middle
- Waits for 3 seconds so you have time to see the text
Warning! This may be dangerous!
Setting the value of Motor A Rotations to 17.7 is calculated using the Bevel Bot motor and gear combination and the goal of moving 100 cm. You may have to adjust the value to accommodate friction or other factors as the robot moves.
There are many ways to program the robot to move and display the distance.
Teacher Support
Students will:
• Understand that engineers design to satisfy a need
• Put into practice teamwork and communication skills such as listening to others and justifying decisions based on evidence
• Build their own robot that can move forward 1m
• Understand that the linear distance of a motorized, wheeled vehicle can be calculated by multiplying the circumference of the wheel by the number of rotations of the motor
• Write a program that calculates and displays the actual distance the robot moves
LEGO® MINDSTORMS Education EV3 Core Set
LEGO® MINDSTORMS Education EV3 Lab or EV3 Programming
Prerequisites
Students should know how to create and download a program, and how to program a motor.
Common Core Science
Practices
1.1, 1.2, 1.3, 1.5, 1.6, 1.8
Core Ideas: Physical Science
3.PS.2
Core Ideas: Engineering, Technology and Application of Science
3.ETS.1
Common Core Mathematics
Practices
1.1, 1.2, 1.4, 1.5, 1.6
ITEEA Standards for Technological Literacy
Design
8, 9, 10
Abilities for a Technological World
11, 13
The Designed World
16
ISTE National Education Technology Standards
1a, 1b, 1c, 2b, 2d, 3a, 3d, 4a, 4b, 4c, 6a, 6c, 6d




