Object Detection
Design ways to avoid accidents between vehicles and objects in the road.

Connect
(5 minutes)
Ignite a classroom discussion around the following questions:
- In what driving situations can a car hit an obstacle?
- What factors are crucial to be aware of in order to avoid collisions with obstacles?
- What causes traffic jams in high density areas?
Allow the students to select the tool(s) they find most appropriate for capturing and sharing their ideas. Encourage them to document their thoughts using text, videos, images, sketchnotes, or another creative medium.
Construct
(15 to 30 minutes)
Build
Students will construct the Robot Educator base model, and then they will add the Ultrasonic Sensor pointing forward.
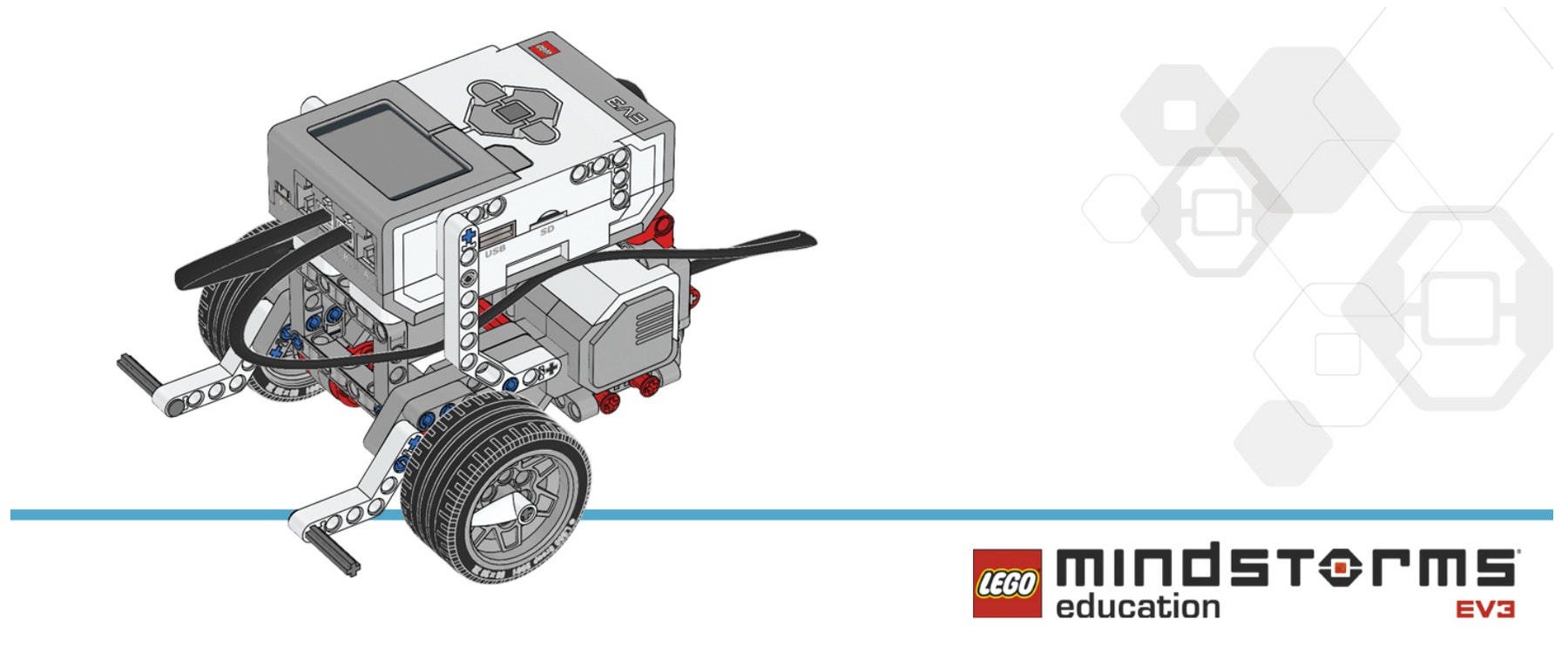
Have the students perform the following building check before they program their robots:
- Are the wires correctly connected from the motors to ports B and C?
- Are the wheels correctly installed?
- Are the wheels rotating freely?
- Are the wires correctly connected from the Ultrasonic Sensor to 4?
Program
Introduce the simple use of the Ultrasonic Sensor.
Demonstrate the Wait Block and how to use it with the Ultrasonic Sensor.
Ask the students how they could make a program to detect any obstacles that might appear while the wheeled robot is moving forward (or backward).
Students will create a program that makes the robot stop at a given point based on a distance measured by the Ultrasonic Sensor.
Allow the students to select the tool(s) they find most appropriate for capturing and sharing their pseudocode. Encourage them to use text, videos, images, sketchnotes, or another creative medium.
POSSIBLE SOLUTION
FILENAME: CODING-05.EV3 (TAB: 1)

DETECT OBJECTS AND STOP
- Start the program.
- Turn both motors on at speed 50.
- Wait for the Ultrasonic Sensor to detect an obstacle at a distance of less than 20 cm.
- Turn both motors off.
Note
Refer students to the Robot Educator Tutorials for further assistance.
In the EV3 Software :
Robot Educator > Basics > Stop at Object
Set up
Before assigning the next task, make sure that you have marked the path the robots must follow and that there is enough space to complete the task. It is a good idea to have students work on a big table or on the floor.
Have the students experiment with using the Ultrasonic Sensor to detect different objects. One of the objects can be a cuboid made of LEGO® bricks.
Contemplate
(35 minutes)
On the road, when a driver sees an object, they slow their car down before coming to a full stop.
Have the students program their robots with the same behavior.
If the Ultrasonic Sensor:
- Detects an object less than 10 cm away, make the robot stop
- Detects an object between 10 and 20 cm away, make the robot slow down
- Does not detect any object, continue to move at full speed
POSSIBLE SOLUTION
FILENAME: CODING-05.EV3 (Tab: 2)
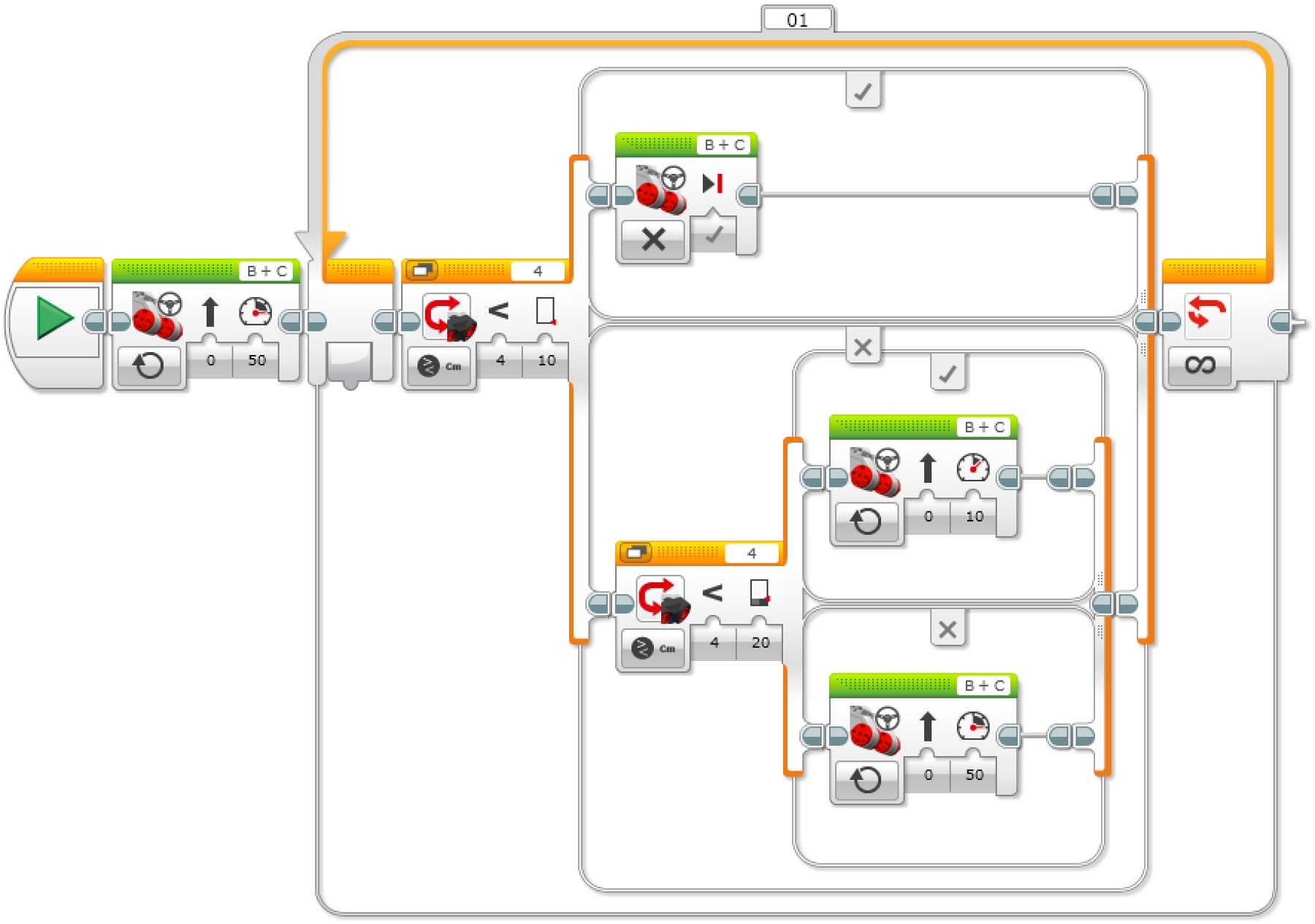
DETECT OBJECTS AND REACT
- Start the program.
- Turn both motors on at speed 50.
- IF the Ultrasonic Sensor detects an obstacle at a distance of less than 10 cm, turn both motors off.
ELSE - IF the Ultrasonic Sensor detects an obstacle at a distance of less than 20 cm, turn both motors on at speed 10.
ELSE - Turn both motors on at speed 50.
- Repeat steps 3 to 7 forever.
Differentiation option
Bring all of the teams together.
Tell the students to place their robots in a vertical line with varying amounts of space between them (just like cars in a traffic jam).
Have them start their programs at the same time and watch what happens.
• Ask the students to refine their programs so that all of the robots continue driving at the same speed with equal distances between them (like well-flowing traffic on a road).
Share
Allow the students to select the tool(s) they find most appropriate for capturing and sharing their creations, unique thinking, and learning process. Encourage them to use text, videos, images, sketchnotes, or another creative medium.
Discuss the concept of efficiency in programming.
How many variations did the group as a whole come up with? Compare the many possible solutions to the given problem.
Assessment Opportunity
Specific rubrics for assessing computational thinking skills can be found under 'Assessment'.
Continue
(45 minutes)
Using Text-Based Programming
Have the students explore text-based programming solutions so they can compare different programming languages.
MakeCode - POSSIBLE SOLUTION
Program with Blocks or JavaScript in your web browser using Microsoft MakeCode editor for LEGO® MINDSTORMS® Education EV3.
You can find the Object Detection Activity Here
Swift Playground - POSSIBLE SOLUTION
While true {
ev3.move (leftPort: .b, rightPort: .c, leftPower: 50, rightPower: 50)
While ev3.measureUltrasonicCentimeters (on : .four) < 20
{
ev3.stopMove (leftPort: .b, rightPort: .C)
}
}
ROBOT C: POSSIBLE SOLUTION
#pragma config(Sensor, S4, sonarSensor, sensorEV3 _ Ultrasonic)
#pragma config(Motor, motorB, leftMotor, tmotorEV3 _ Large,
PIDControl, driveLeft, encoder)
#pragma config(Motor, motorC, rightMotor, tmotorEV3 _ Large,
PIDControl, driveRight, encoder)
/*
Create a program that drives the robot forward until the Ultrasound
Sensor sees an object.
The robot then stops.
*/
task main()
{
//Set motor speed at 50% (Drive Forwards).
setMotorSpeed(motorB, 50);
setMotorSpeed(motorC, 50);
while(getUSDistance(sonarSensor) < 20)
{
//Keep going until the Ultrasonic Sensor sees a value less
than 20cm.
}
//Once the Ultrasonic Sensor sees a value less than 20cm.
//Set motor speed to 0% (Stop).
setMotorSpeed(motorB, 0);
setMotorSpeed(motorC, 0);
}
Warning! This may be dangerous!
The following is a possible solution using the text-based programming language ROBOTC. You may choose to use any other LEGO MINDSTORMS Education EV3 compatible text-based programming languages.
LEGO Education has no ownership of the ROBOTC platform and does not provide any support or guarantee of the quality of the user experience and technology used. All required set up information is provided by ROBOTC at robotc.net. We recommend always to reinstall the official LEGO MINDSTORMS EV3 Brick firmware when you finish using other programming languages.
Other Program Solutions
Swift Playground - POSSIBLE SOLUTION
While true {
if ev3.measureUltraSonicCentimeters (on : .four) < 20
{
if ev3.measureUltrasonicCentimeters (on: .four) < 10
{
ev3.stopMove(leftPort: .b, rightPort: .c)
else
{
ev3.move(leftPort: .b, rightPort: .c, leftPower: 10,
rightPower: 10)
}
}
else
{
ev3.move(leftPort: .b, rightPort: .c, leftPower: 50,
rightPower: 50)
}
}
ROBOT C: POSSIBLE SOLUTION
Teacher Support
Students will:
Extend understanding of the Loop
NGSS
MS-ETS1-1. / MS-ETS1-2. / MS-ETS1-3. /MS-ETS1-4.
CSTA
2-A-2-1 / 2-A-7-2 / 2-A-7-3 / 2-A-7-4 / 2-A-5-5 / 2-A-5-6 / 2-A-3-9 / 2-A-6-10 / 2-C-7-11 / 2-C-4-12 / 2-D-5-16 / 2-I-1-20
Student Material
Share with:
 Google Classroom
Google Classroom