Robot Arm
Investigate how to make the most energy efficient sequence for a Robot Arm.

Connect
(5-10 Minutes)
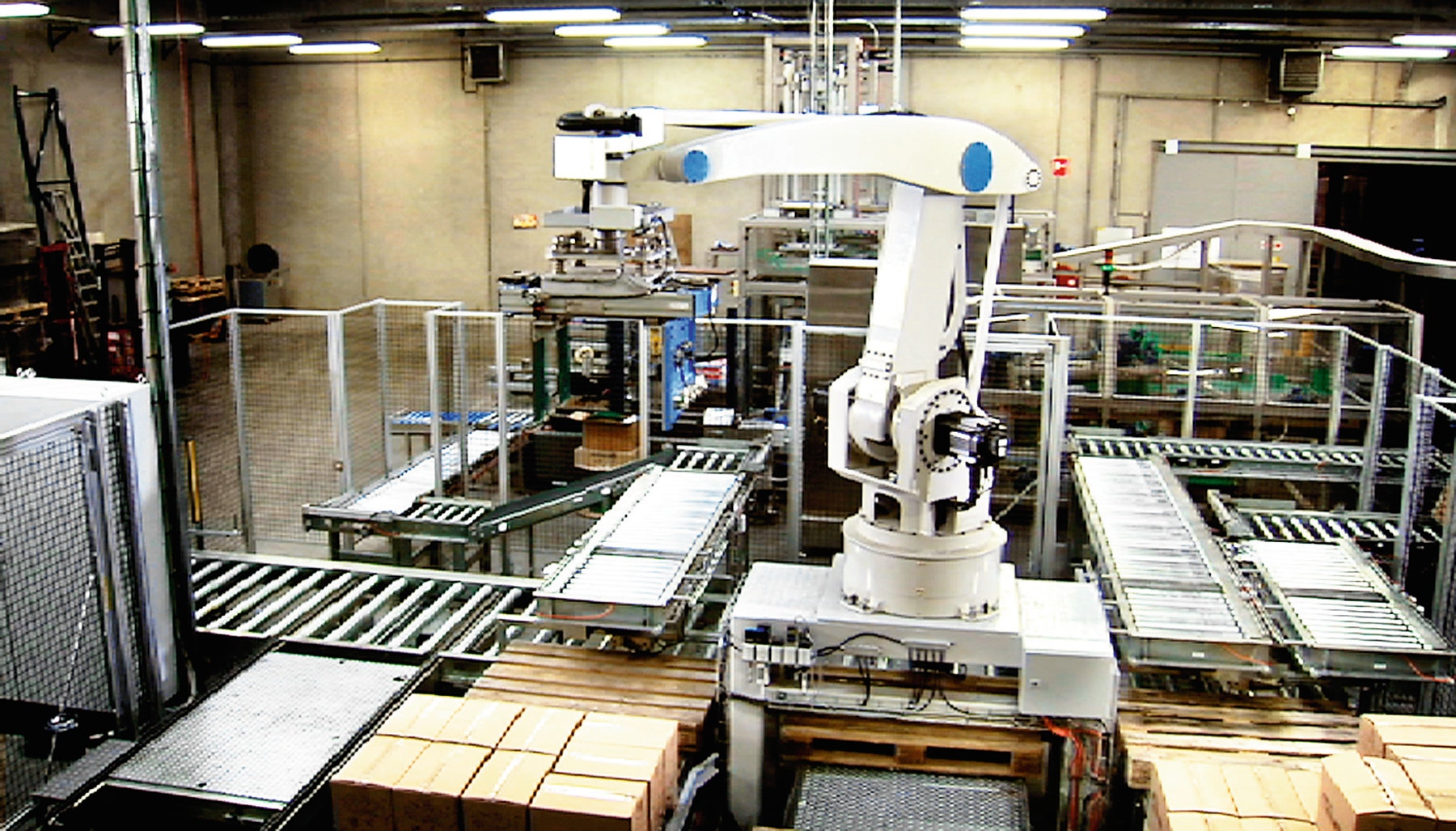
Robotic arms are used for jobs that involve picking up, moving and placing objects. Usually they do jobs which are difficult or repetitive, and need to be done quick and efficiently. To achieve maximum efficiency, the picking and placing sequence needs to be decided beforehand.
Build the Robot Arm and investigate how to make the most energy efficient sequence of strokes. Let’s find out!
Construct
(20-25 Minutes)
Build the Robot Arm
(All of book 4A and book 4B to page 19, step 19).
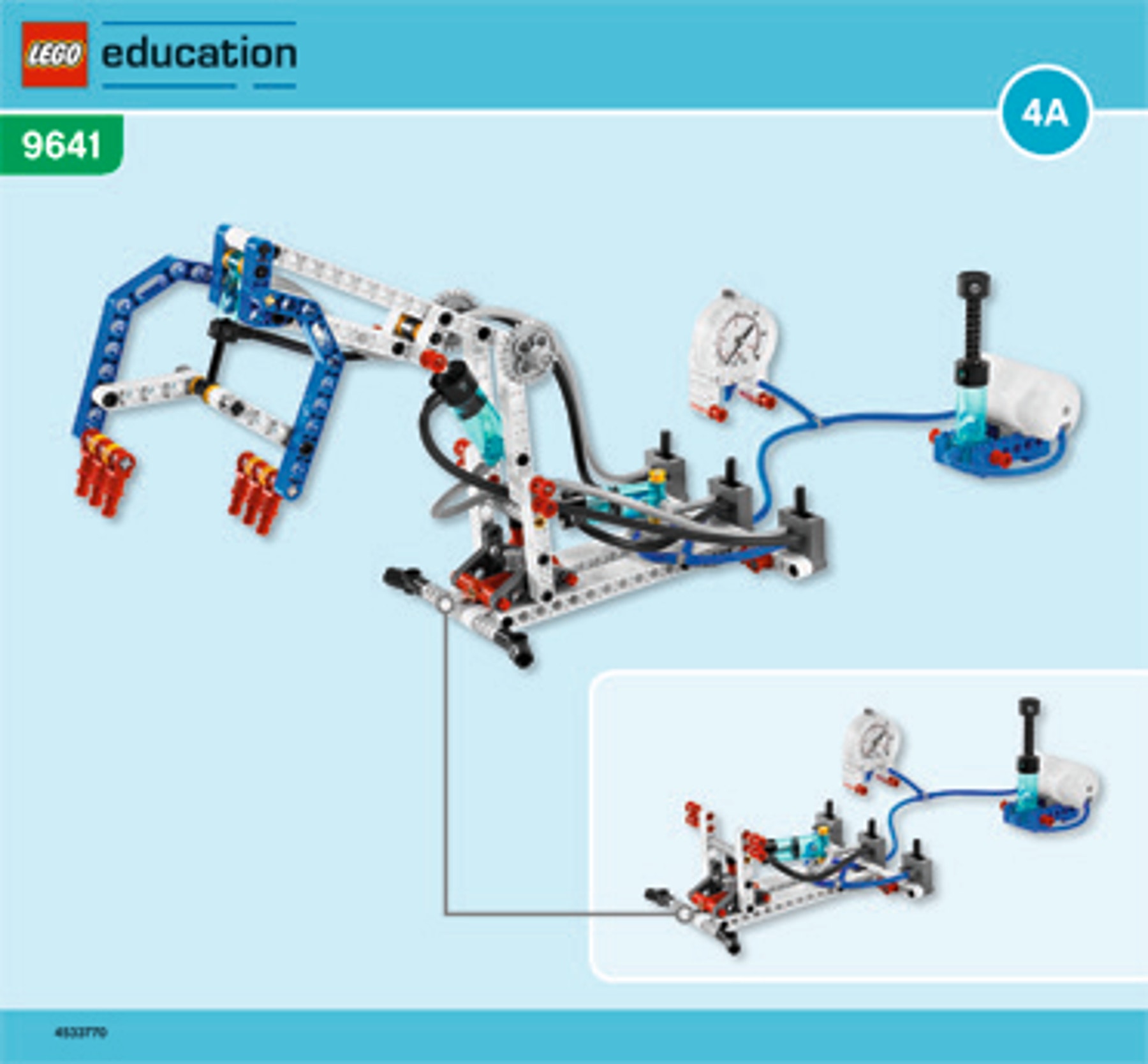
Pump air into the system and use the manometer to detect whether there is an air leak.
Try the valve settings and check all moving parts to ensure that they move freely.
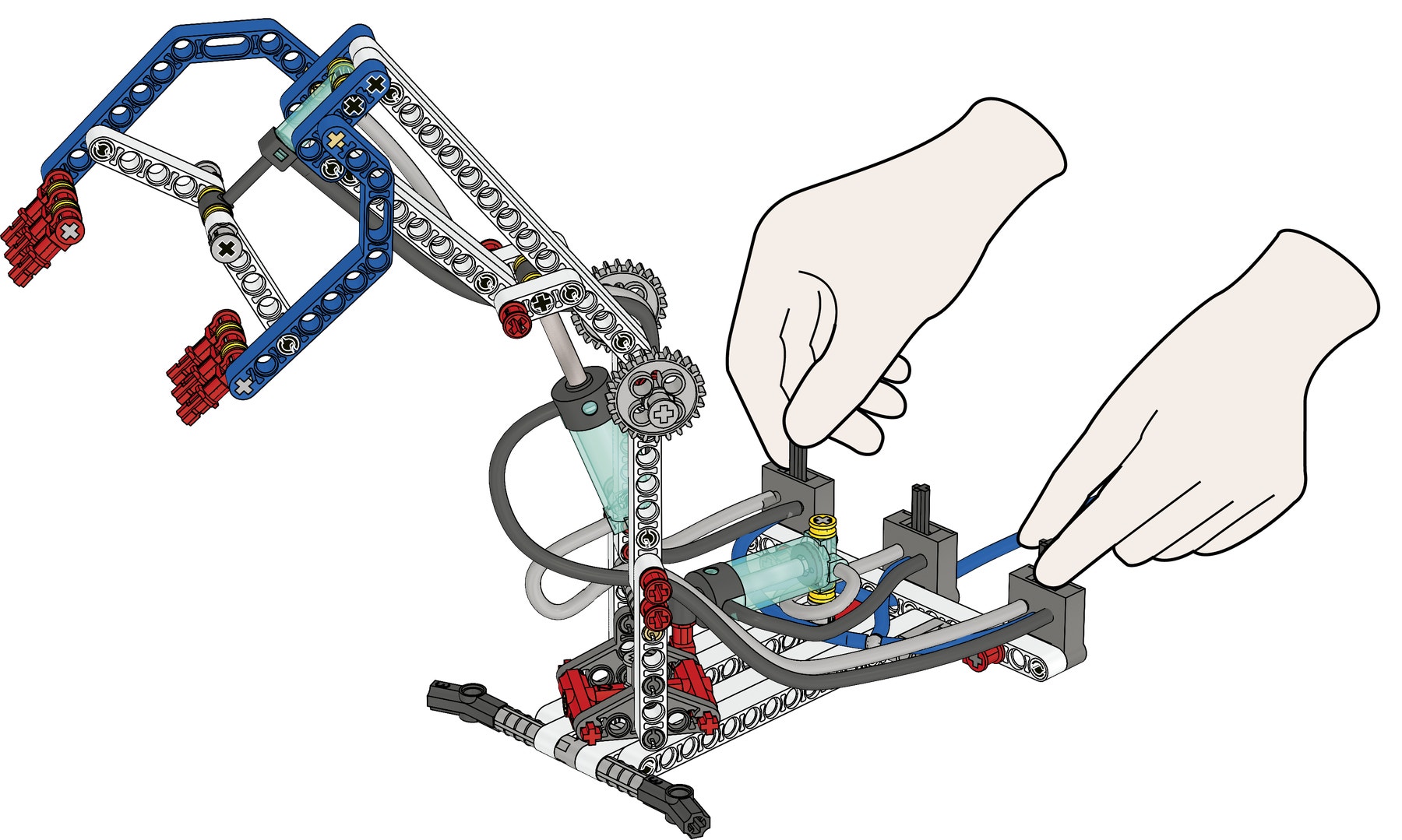
Then turn the arm to its resting position: turned to the far right, arm up and grippers open, and empty the air tank.
Hint
The easiest way to empty the air tank is to disconnect the tube going from the air tank to the valve.
Contemplate
(20-25 minutes)
What is the most energy efficient sequence?
Find out which sequence is the most energy efficient for picking and placing objects.
First, predict which sequence of strokes is the most energy efficient at picking and placing a pellet of paper. Your sequence has to start in the resting position, use all six movements at least once and then return to the resting position. Record your predictions on the worksheet.
Then, test your sequence of strokes and note the loss of pressure after each stroke. Start with 2.5 bars of pressure. Record your findings on the worksheet and graph paper.
Test several times to make sure your results are consistent.
Have the students reflect on their investigations by asking questions such as:
• What did you predict would happen and why?
It takes eight strokes to complete the work cycle and back to the resting position. If the object is dropped without lowering the arm it can be done in six strokes.
• How does the Robot Arm work?
The gripper is a complex third class lever linkage. The arm lift is a third class lever too.
• Can you explain any features of the pressure graph?
The small cylinder uses much less air resulting in less pressure loss than the big cylinders. See stroke B and F.
Continue
(25-30 Minutes)
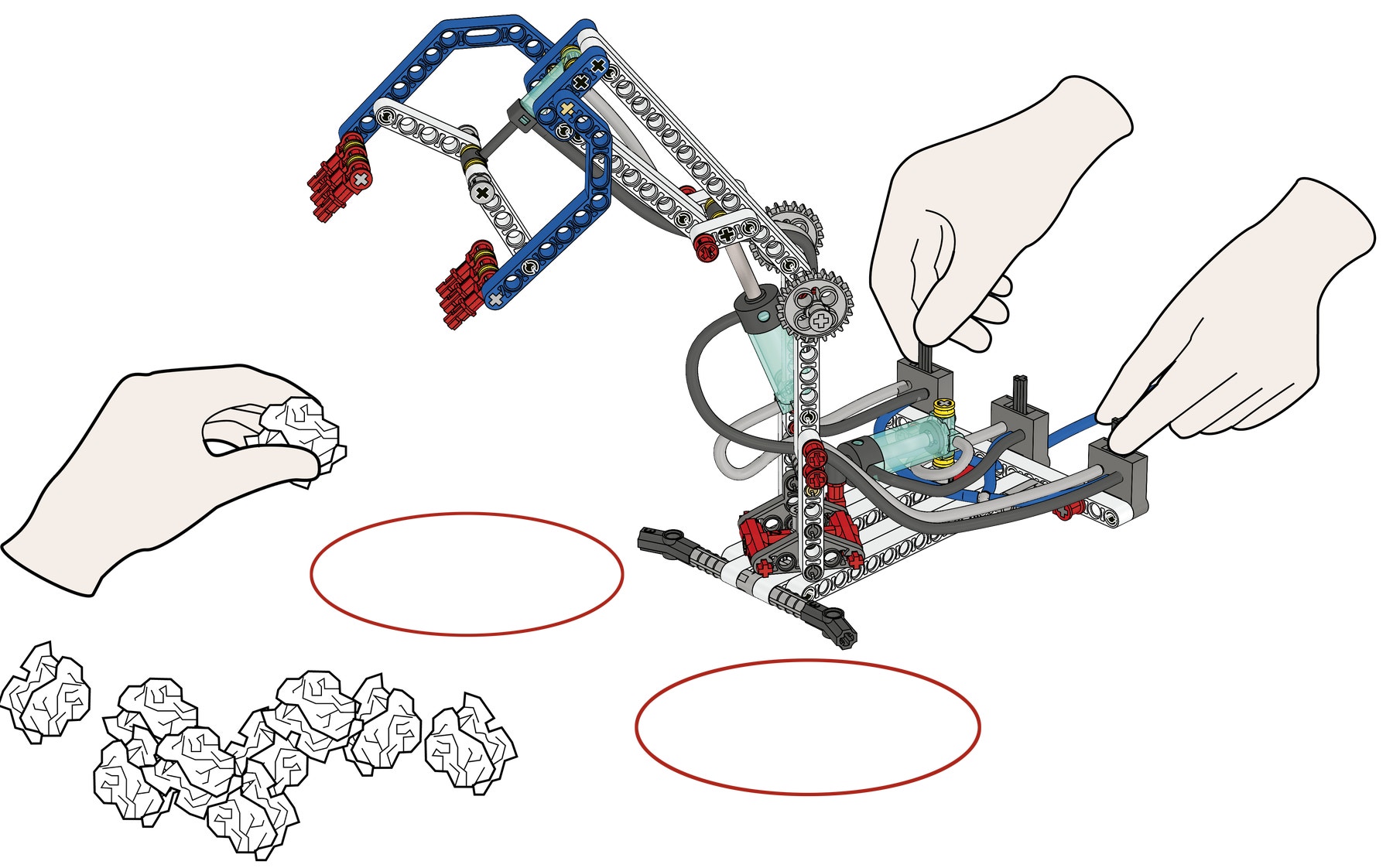
How good of a robot operator are you?
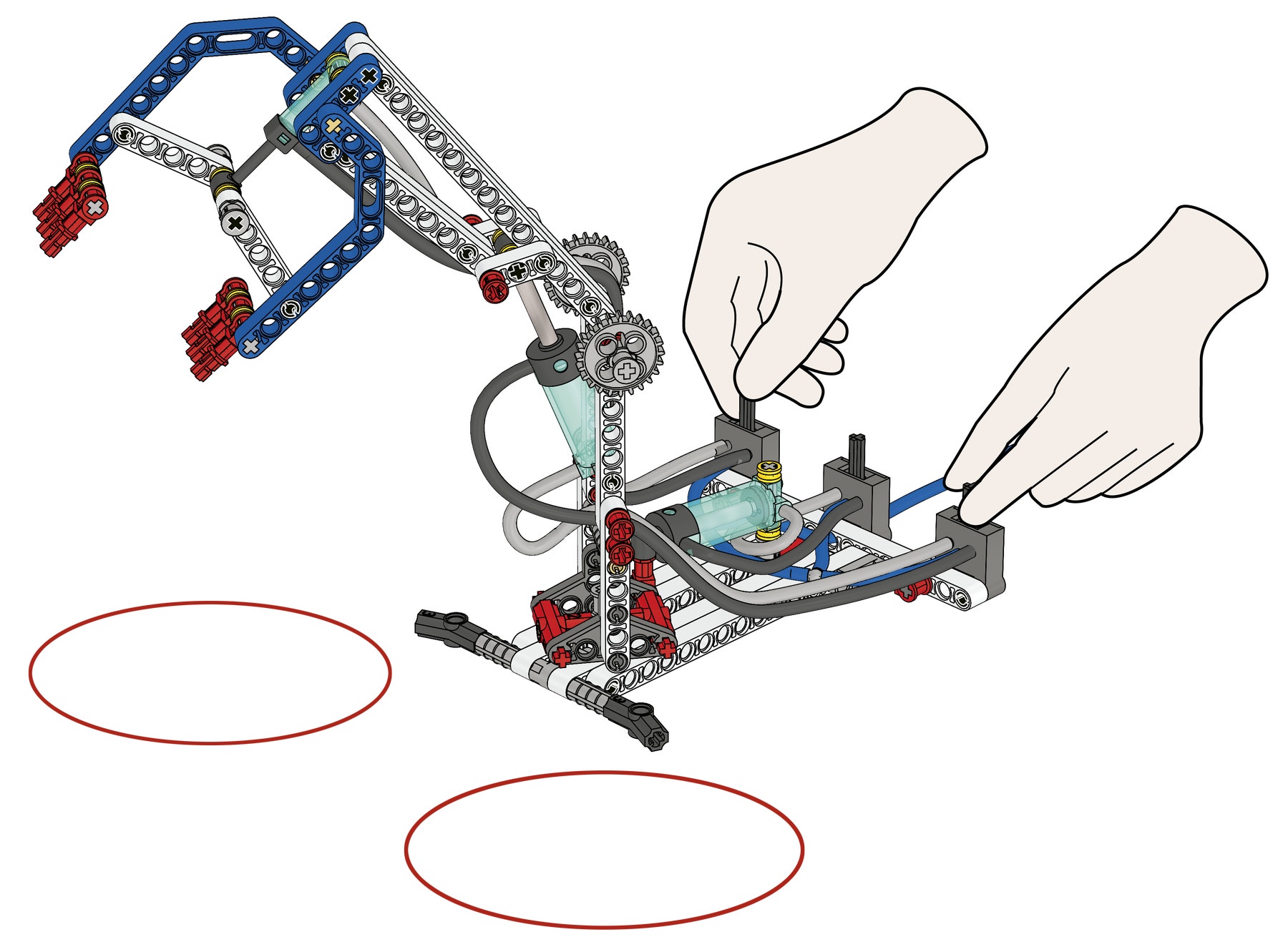
Find out how quickly and accurately you can pick and place pellets of paper from one circle to another.
First, predict how many pellets you can accurately place within the circle in 30 seconds. Record your predictions on the worksheet.
Then, test how many pellets you actually place accurately within the circle in 30 seconds. Record your findings on the worksheet.
Repeat the test three times to see if your speed and accuracy improve.
Optional: Further investigations
Design and make your own grippers that will help you to pick and place different objects of your choice.
Hint
To help overcome the loss of pressure, you could build a compressor.
Teacher Support
Students will explore the concepts of:
Area
Behavior of gases under pressure
Friction
Scientific investigation
Assembling components
Control of mechanisms
Evaluating
Testing before making improvements
Using mechanisms - levers
9686 Simple & Powered Machines Set (two students per set recommended)
9641 Pneumatics Add-on Set
A collection of small objects of different size and weight
Graph paper
Several small pieces of crumpled up paper
NGSS
Crosscutting Concepts
Patterns
Cause and effect: Mechanism and explanation
Systems and system models
Structure and Function
Stability and change
Science and Engineering Practices
Ask questions and Defining Problems
Developing and using models
Planning and carrying out investigations
Using mathematics, Informational and Computer Technology, and computational thinking
Analyzing and interpreting data
Constructing explanations and designing solutions
Engaging in argument from evidence
Obtaining, evaluating, and communicating information
Common Core Mathematics Standards
MP4 / MP5 / 7.RP.A
Common Core English Language Arts Standards
SL 6-8.1 / RST 6-8.3 / RST 6-8.4 / RST 6-8.7 / WHST 6-8.1 / WHST 6-8.2 / WHST 6-8.4 / WHST 6-8.7
Student Material
Share with:
 Google Classroom
Google Classroom



