Robot Hand
Investigate what pressure is needed to hold different objects without dropping or crushing them.
Connect
(5-10 Minutes)
Industry and hospitals often need to handle and move objects that can be dangerous to touch by hand. Metal objects and fragile glass containers, for example, are often handled using pneumatic hands or grippers.
Build the Robot Hand and investigate what pressure is needed to hold different objects without dropping or crushing them. Let’s find out!
Construct
(20-25 Minutes)
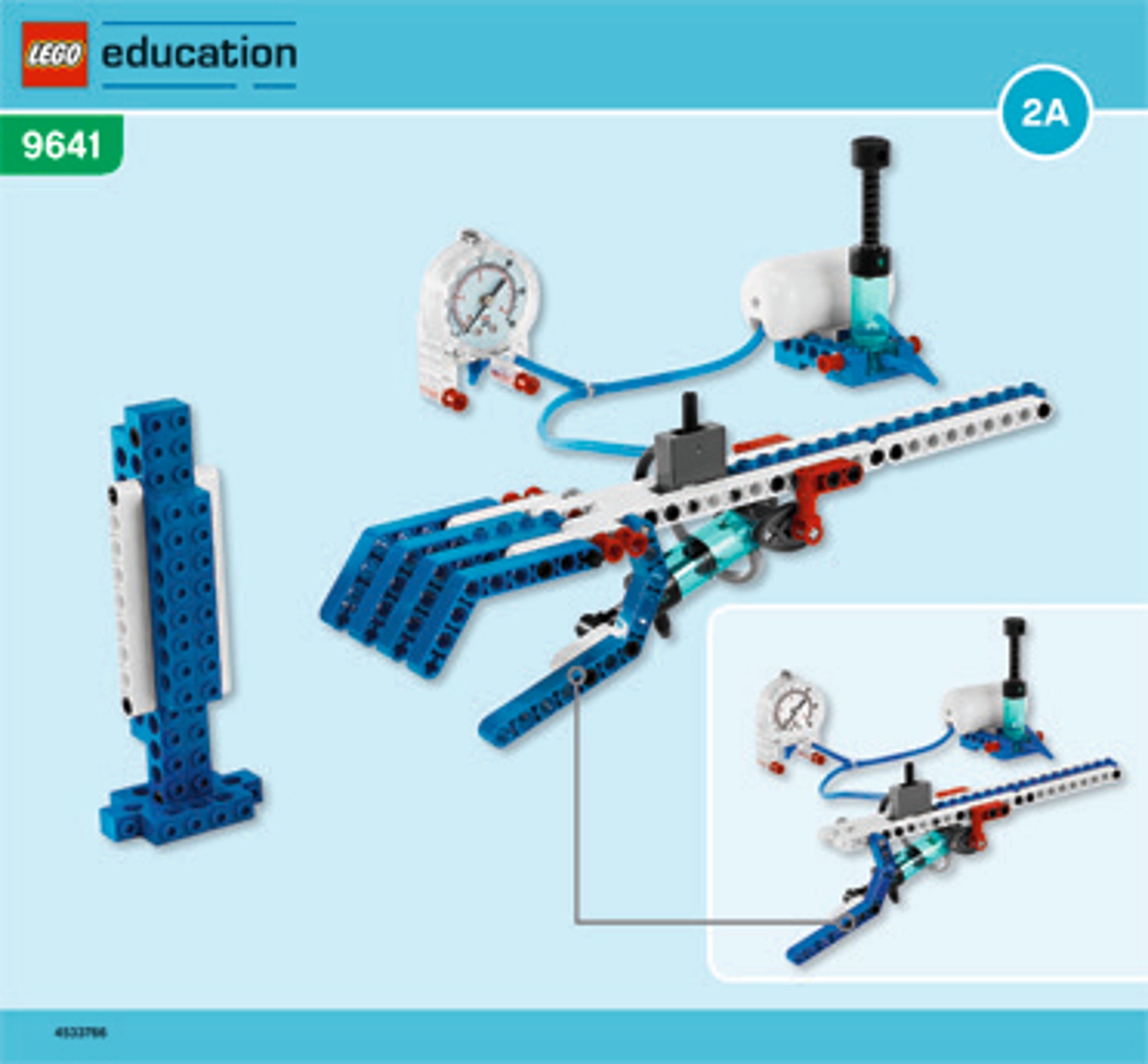
Build the Robot Hand
(All of book 2A and book 2B to page 10, step 16).
Pump air into the system and use the manometer to detect whether there is an air leak.
Try the valve settings and check all moving parts to ensure that they move freely.
Then open the hand and empty the air tank.
Hint
The easiest way to empty the air tank is to disconnect the tube going from the air tank to the valve.
Contemplate
(20-25 minutes)
How good a grip?
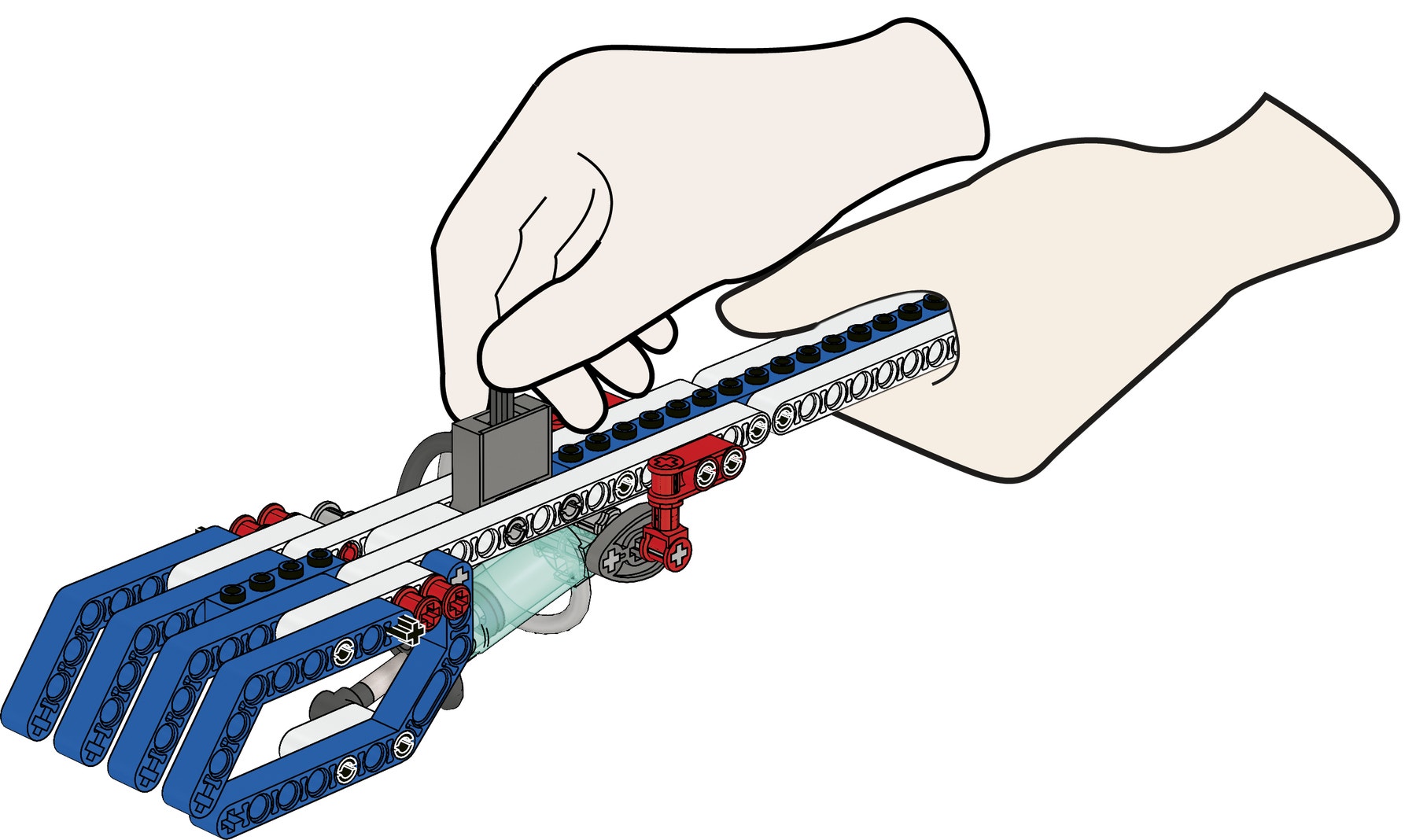
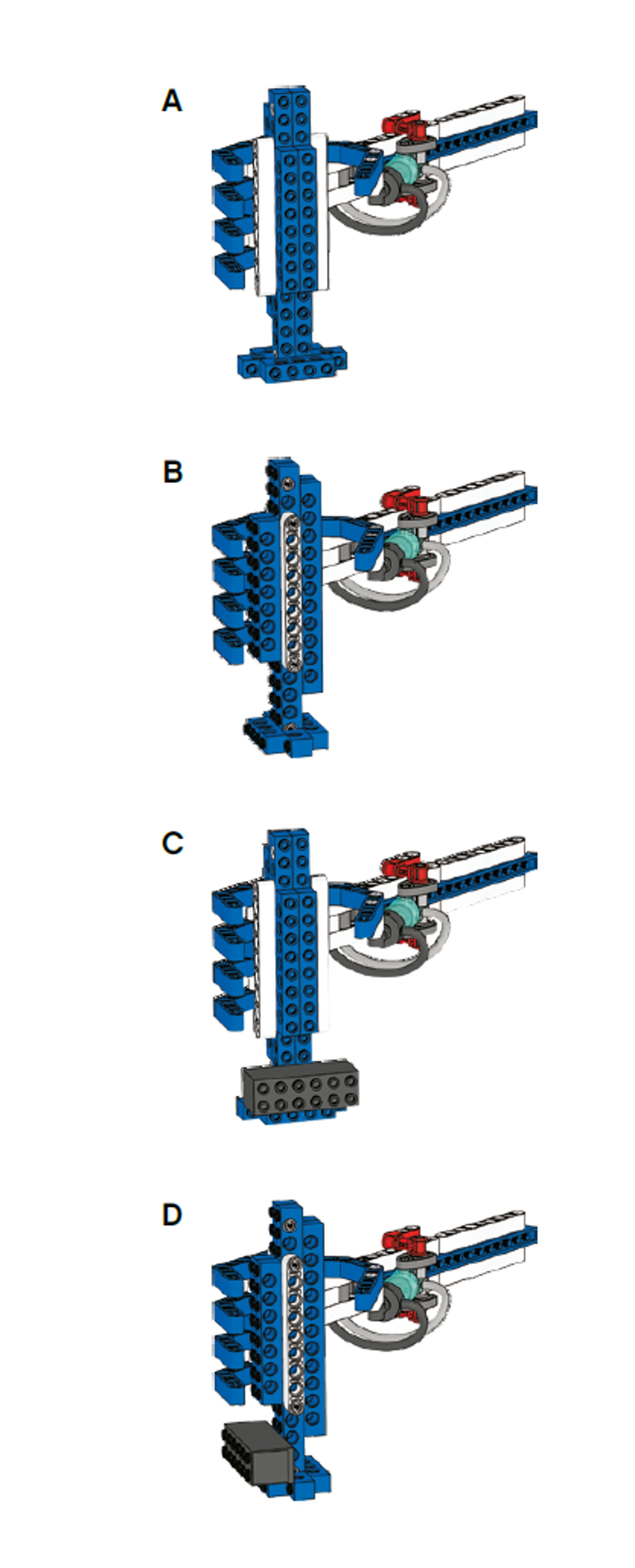
The Robot Hand can pick up the carrier from two different sides – the smooth white side and the studded blue side. Find out how much pressure the Robot Hand needs to pick up the carrier.
First, predict how much pressure the Robot Hand needs to lift carrier A. Record your findings on the worksheet.
Then, test how much pressure is needed. Record your findings on the worksheet.
Next, follow the same procedure for Robot Hands B, C and D. Test several times to make sure your results are consistent.
Robot Hand A (page 10, step 16) needs a pressure of about 0.5 bar
Robot Hand B (page 10, step 16) needs a pressure of about 0.4 bar
Robot Hand C (page 12, step 18) needs a pressure of about 1.2 bars
Robot Hand D (page 12, step 18) needs a pressure of about 1.0 bar
Does weight have an effect?
When carrying extra weight, the type of surface does matter. Extra friction and gripping points on the load mean less crushing pressure is needed. This is safer and more efficient.
Have the students reflect on their investigations by asking questions such as:
• What did you predict would happen and why?
• How does the Robot Hand work and what type of lever system does it use?
The gripping thumb is a third class lever. The pivot is at the wrist.
• What are the limitations of the Robot Hand’s grip?
The fingers and thumb are too slippery and do not have enough friction. The fingers do not bend in and grip like real fingers.
Continue
(25-30 Minutes)
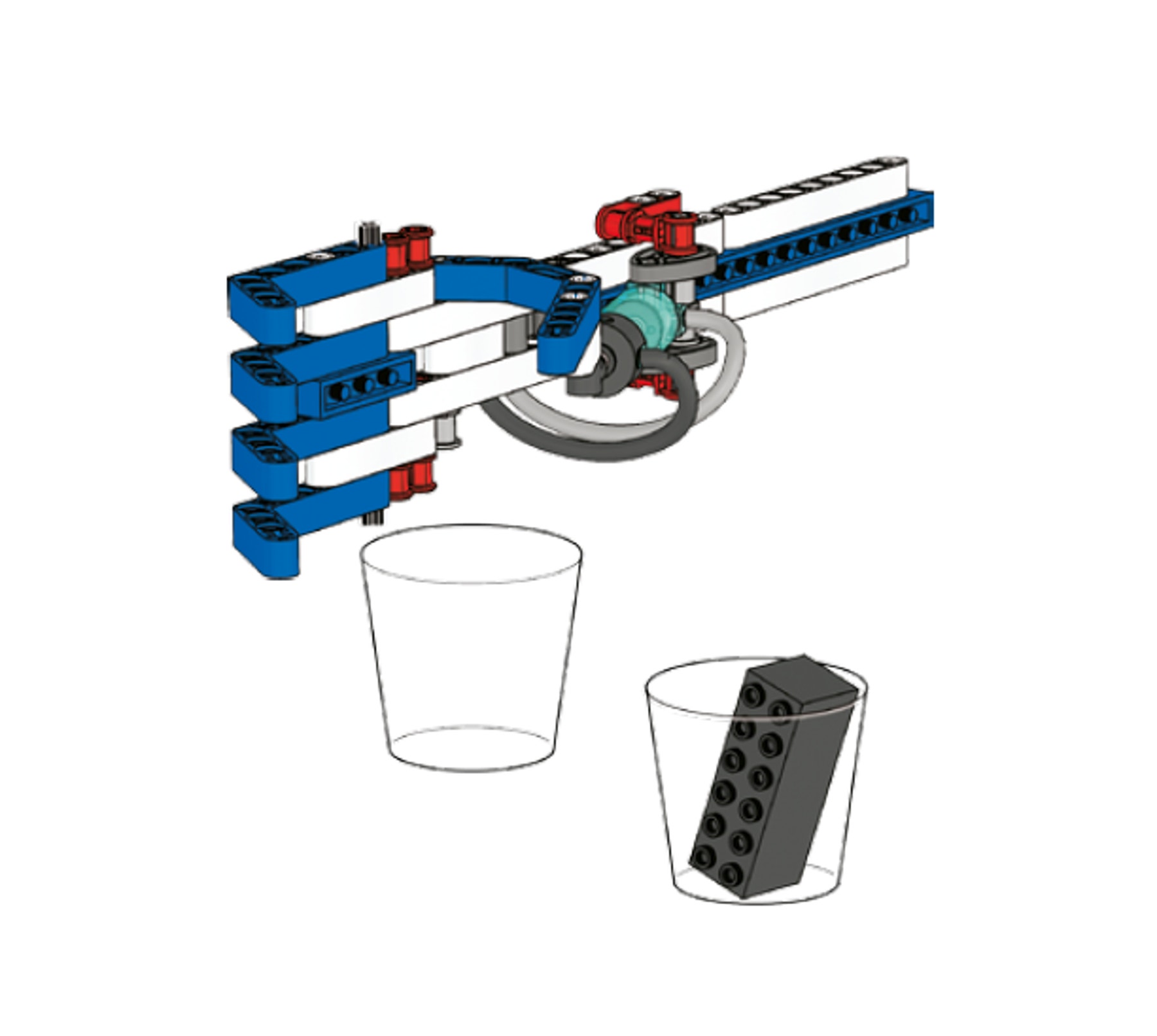
What else can the Robot Hand hold?
Prepare a fragile paper or plastic cup. Find a variety of different objects to put in the cup. Find out how much pressure is needed for the Robot Hand to pick up the cup.
First, predict how much pressure the Robot Hand needs to lift the different objects without damaging them. Record your prediction on the worksheet.
Then, test how much pressure is needed. Record your findings on the worksheet.
Test several times to make sure your results are consistent.
Hint
Make an egg-shaped object out of modelling clay. Marks on the clay’s surface can be used to record damage caused by pressure. But remember to wrap it in cling film to keep the elements clean.
Optional: Further investigations
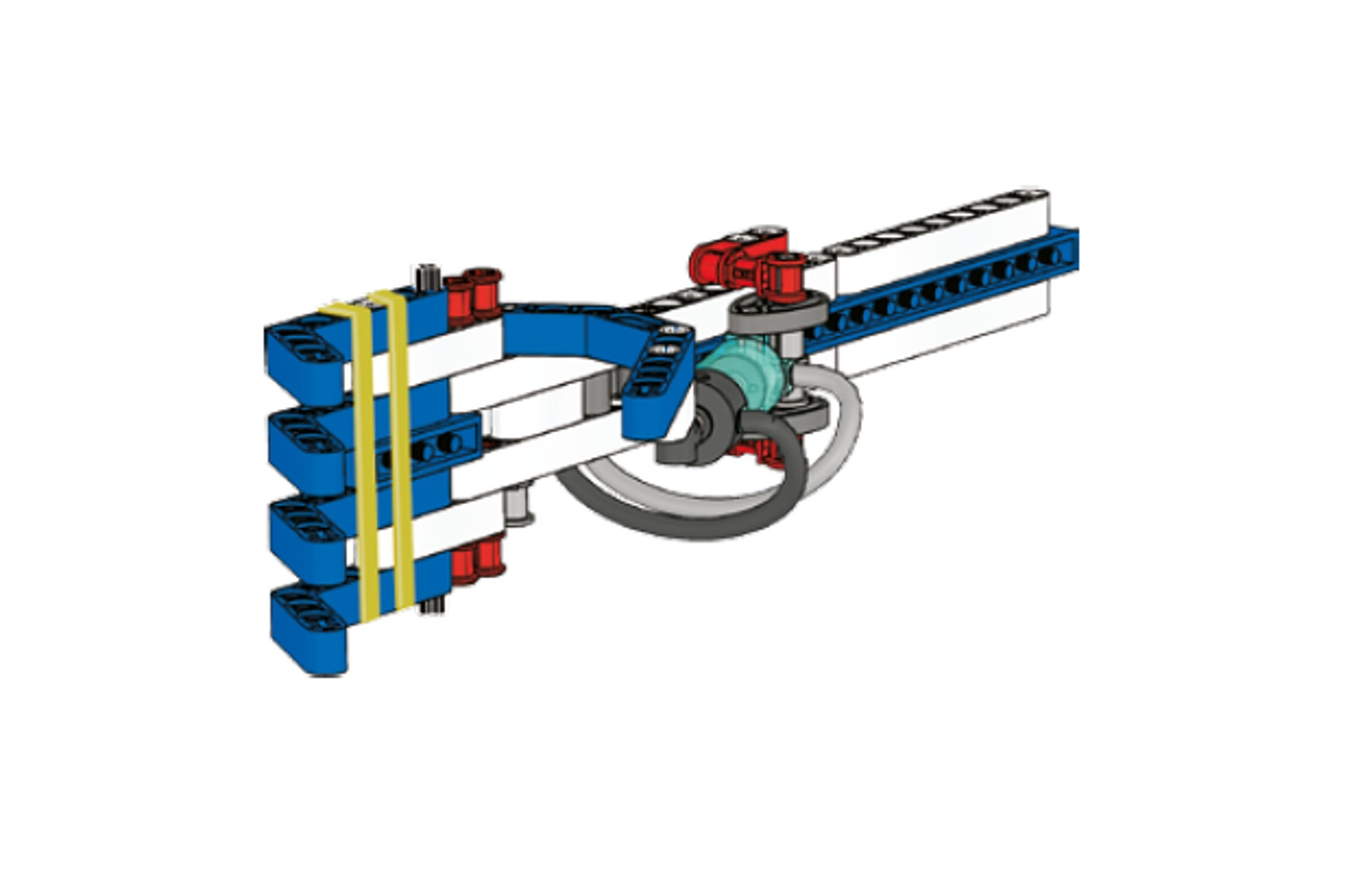
Need a better grip? Experiment by adding different materials to the Robot Hand for a better and safer grip that also causes less damage.
Teacher Support
Students will explore the concepts of:
Behavior of gases under pressure
Forces
Friction
Measuring weight
Scientific investigation
Assembling components
Evaluating
Testing before making improvements
Using mechanisms - levers
9686 Simple & Powered Machines Set (two students per set recommended)
9641 Pneumatics Add-on Set
A collection of small objects of different size and weight
Plastic cup
Modelling clay
Rubber bands
Weighing machine
NGSS
Disciplinary Core Ideas: Physical Science
MS-PS3 Energy
Crosscutting Concepts
Cause and effect: Mechanism and explanation
Systems and system models
Structure and Function
Stability and change
Science and Engineering Practices
Ask questions and Defining Problems
Developing and using models
Planning and carrying out investigations
Analyzing and interpreting data
Constructing explanations and designing solutions
Obtaining, evaluating, and communicating information
Common Core Mathematics Standards
MP4 / MP5 / 7.RP.A
Common Core English Language Arts Standards
SL 6-8.1 / RST 6-8.3 / RST 6-8.4 / RST 6-8.7 / WHST 6-8.1 / WHST 6-8.2 / WHST 6-8.4 / WHST 6-8.7
Student Material
Share with:
 Google Classroom
Google Classroom



