The Walker
Explore the scientific concepts of gears, levers, linkages, ratchet, force, friction and measuring time.

Connect
(5-10 Minutes)
Jack and Jill are having a great day out hiking. But it’s hot, they are getting tired and their backpacks seem to be getting heavier and heavier.
When Jack and Jill stop for a short break, a line of ants passes them! “How can they walk and carry so much so easily?” says Jack. Jack and Jill think it would be great if an ant could carry them too!
How can you make a walker that will carry Jack and Jill along the trail?
Let’s find out!

Construct
(20-25 Minutes)
Build the Walker
(all of book 13A and book 13B to page 13 step 18)
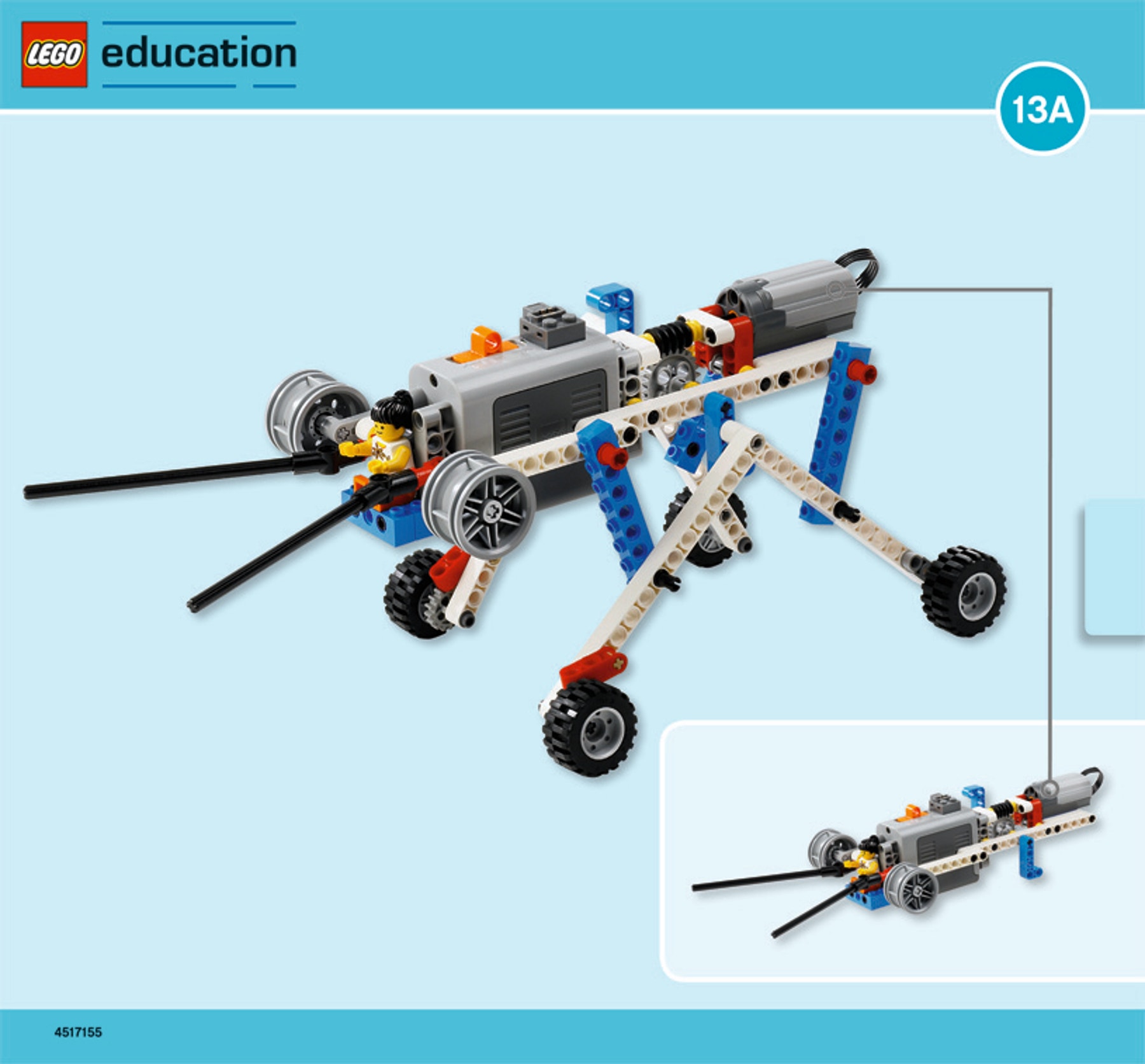
• Make sure the power lead is held clear of all moving parts
• Place it on a smooth surface and start the motor by pushing the battery switch forward
• The legs should move freely
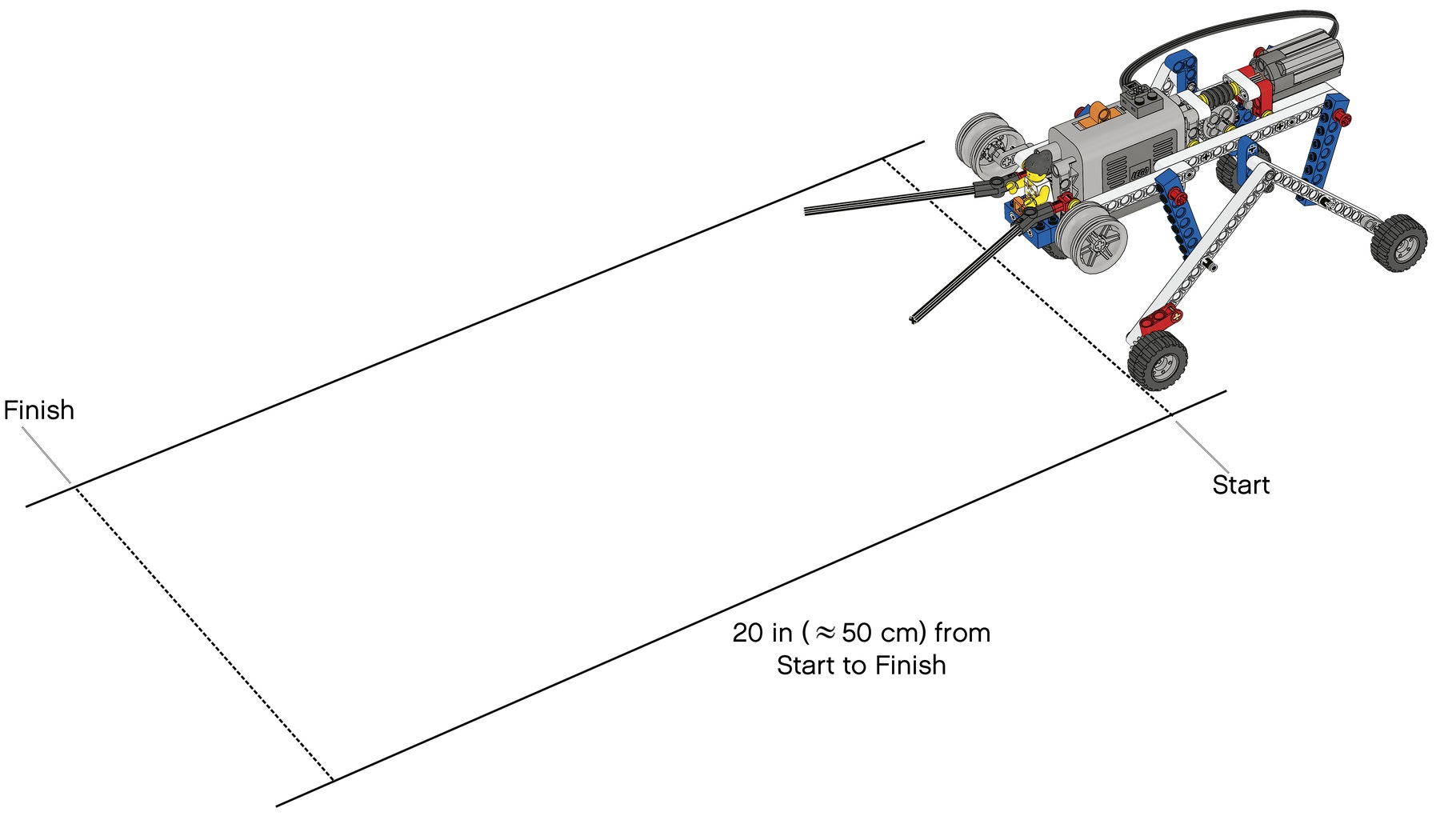
Mark Your Test Track
Mark a start line and finish line 50 cm (≈ 20 in) apart.
Contemplate
(20-25 minutes)
How fast can the walker walk?
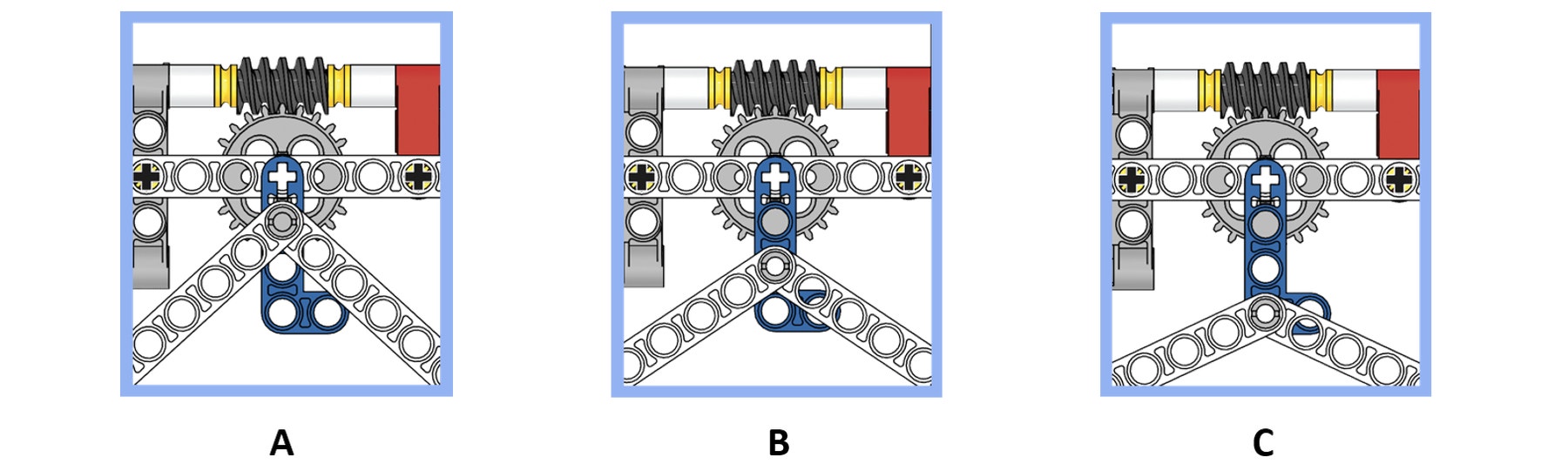
The walker will walk at different speeds depending on the leg settings.
First predict how long it will take the walker to walk 50 cm (≈ 20 in) using leg setting A. Then test your prediction. Next, follow the same procedure for leg settings B and C.
Test several times to make sure your results are consistent. Test results may vary depending on the surface of your test track.
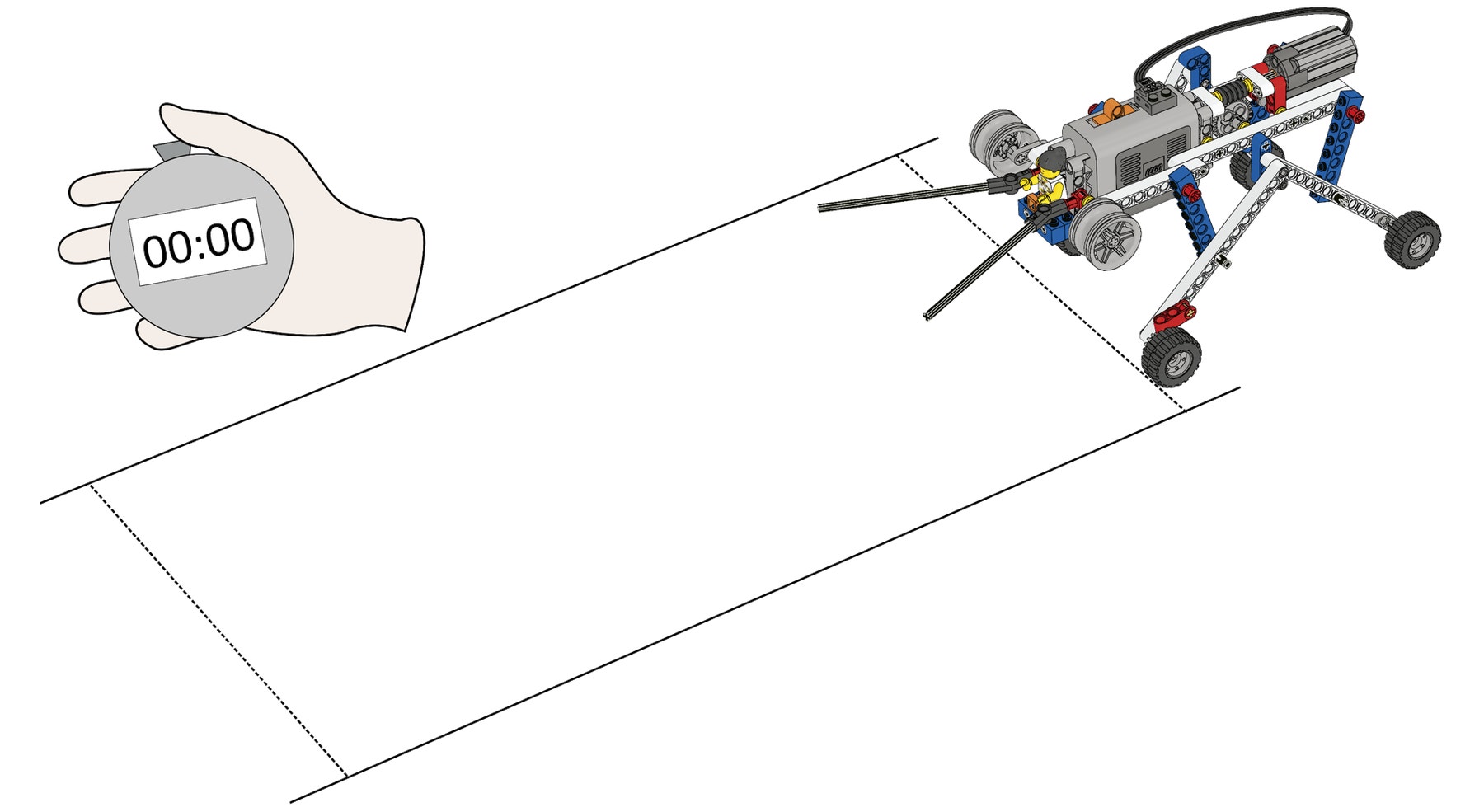
Leg setting A (page 13, step 18) results in the slowest result. It needs about 27 seconds to walk 50 cm (≈ 20 in).
Leg setting B (page 14, step 19) gives the steadiest speed. It needs about 16 seconds to walk 50 cm (≈ 20 in).
Leg setting C (page 15, step 20) provides the fastest result. It needs about 12 seconds to walk 50 cm (≈ 20 in).
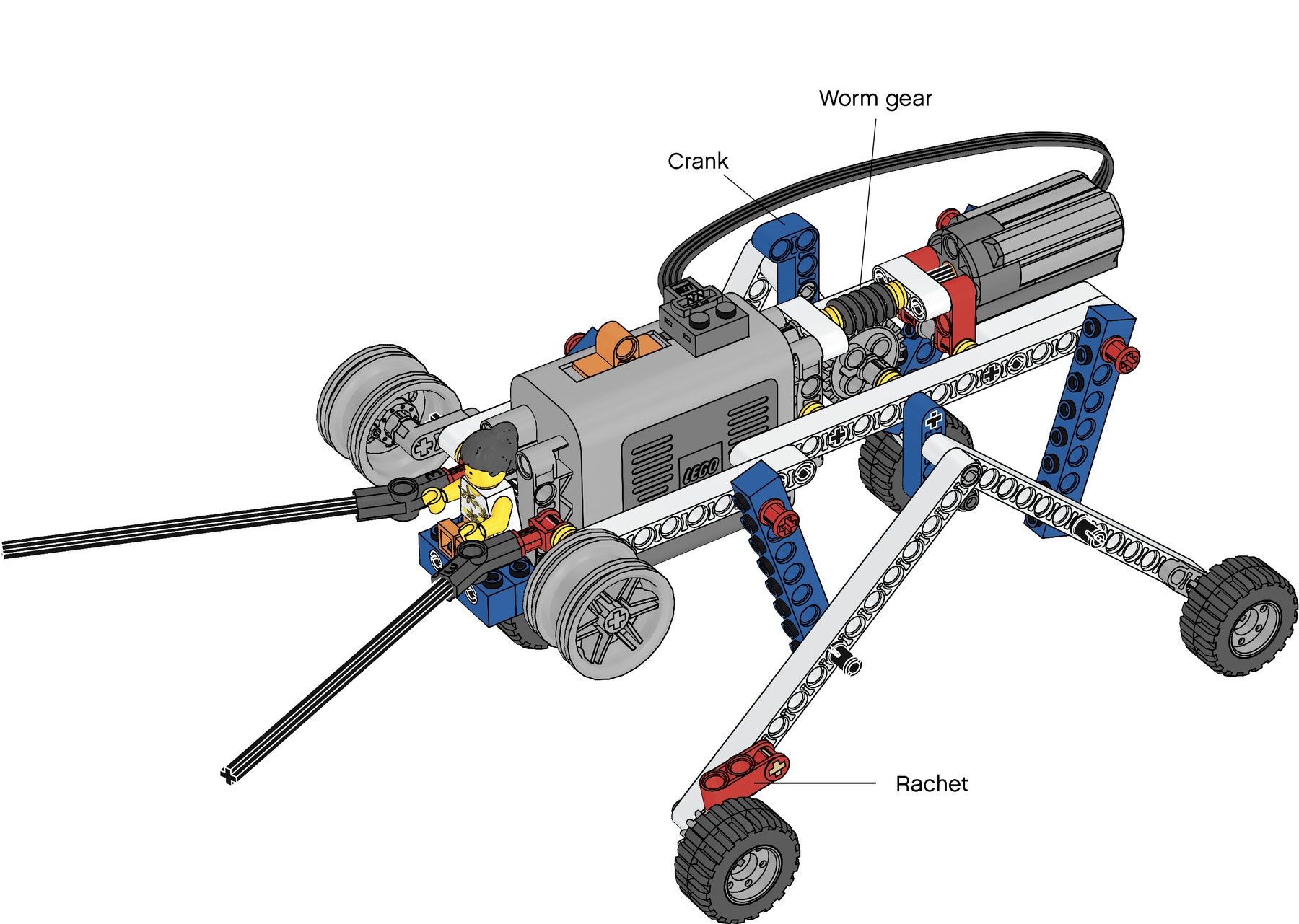
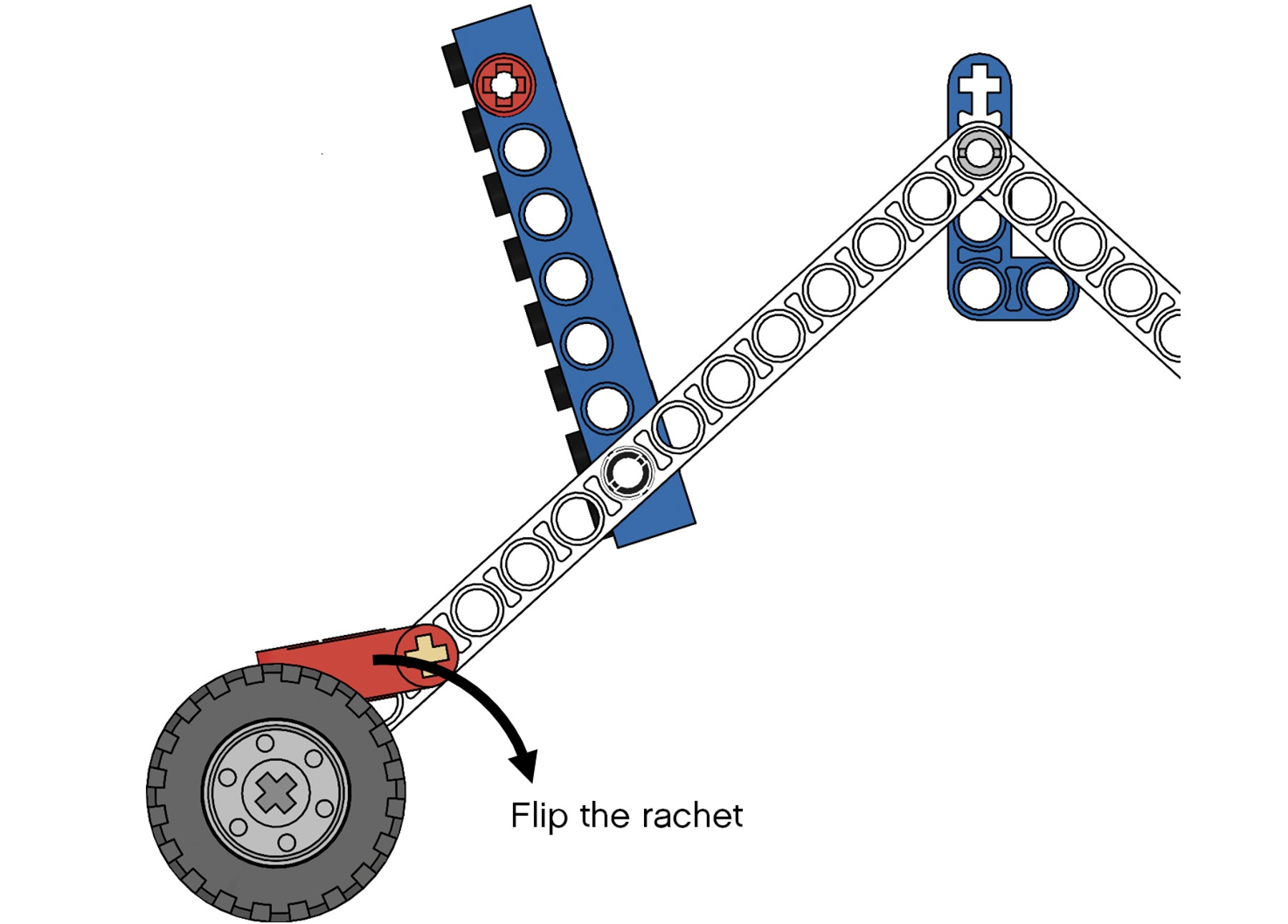
Can you explain what the ratchets do?
The front feet cannot grip with the ratchet loose. Without the ratchets the leg movements would force the wheels to roll backward and forward. The ratchet only allows the wheels to roll one way.
Continue
(25-30 Minutes)
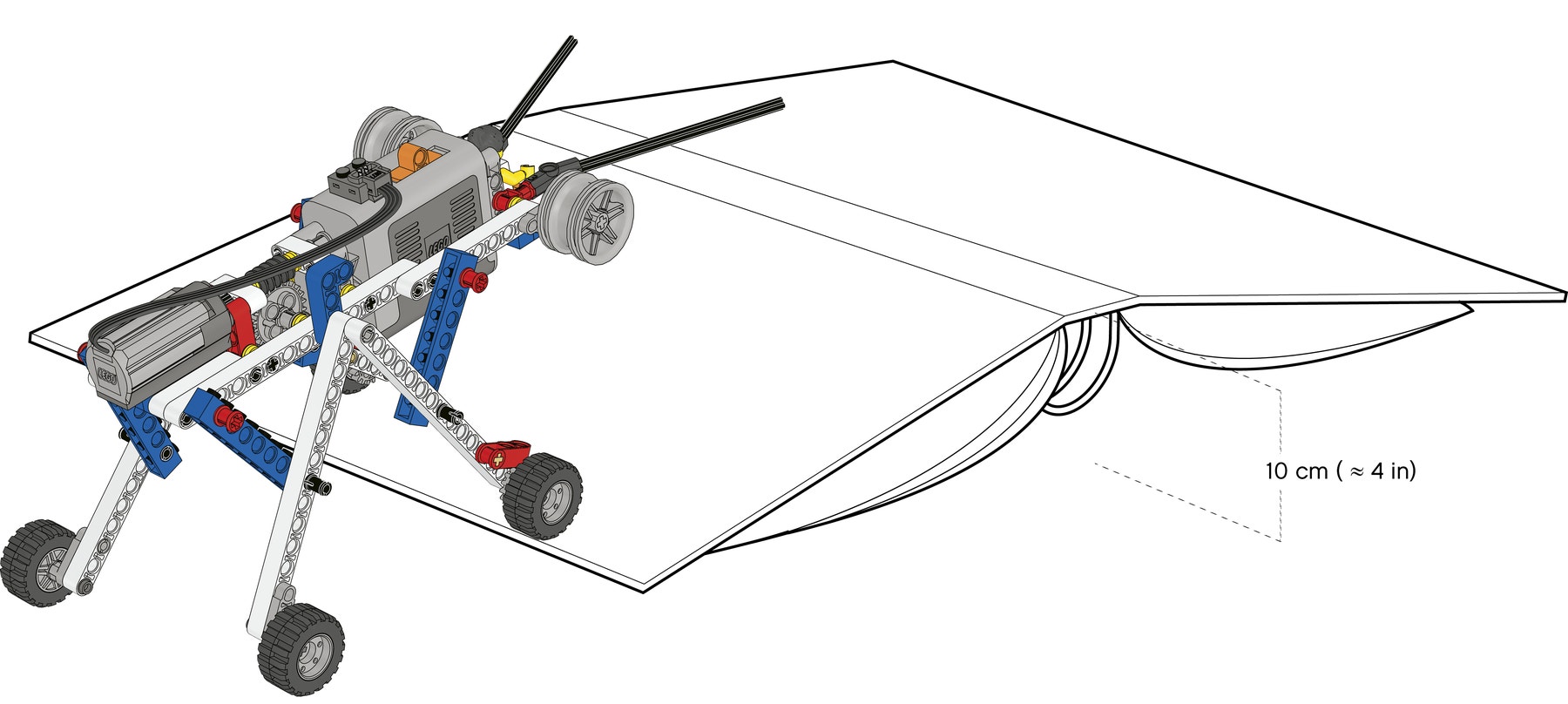
Which walker is the fastest hill climber?
Make a 10 cm (≈ 4 in) hill from a big book or ring binder. Place the walker as shown in the illustration.
First predict which leg settings A, B or C is fastest for climbing over hills? Then test which in fact is the fastest hill climber.
Did you know?
A walking robot called Dante 2 is designed to climb down very steep rocky slopes into the gas-covered floors of dangerous volcanoes.
It can also rappel down ropes and climb over rocks up to 1 m (≈ 1 yd) high!
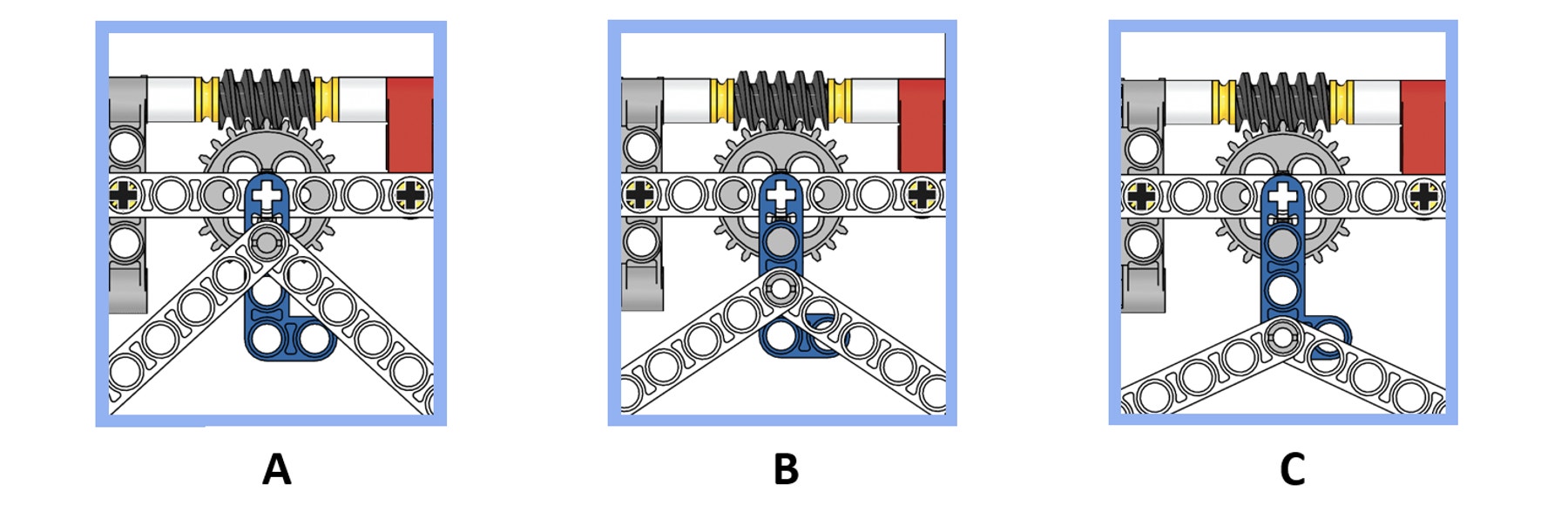
With leg setting A (page 13, step 18) the walker walks slowly, but steadily climbs the hill.
Leg setting B is (page 14, step 19) fast, but more unstable than leg setting A.
Leg setting C (page 15, step 20) is the fastest, but very unstable and as such not suited for crossing hills.
What else happens?
The walker rolls down the hill! This is because the ratchets only resist forces in one direction, not the other.
The walker can stand on its antennae.
Optional: Make the walker move in different ways
Can you make the walker move in different ways? Try out different settings of the two blue cranks.
Tip:
These crank settings will make the walker move differently.
Teacher Support
Students will explore the concepts of:
Gears
Levers
Linkage
Ratchet
Using and combining components
Force
Friction
Measuring time
Scientific investigation
9686 Simple & Powered Machines Set (two students per set recommended)
Large thin book with a hard cover – big book or ring binder
Ruler
Stopwatch or timer
Up to 1 m (≈ 1 yd) of floor space
NGSS
Crosscutting Concepts
Structure and Function
Science and Engineering Practices
Developing and using models
Planning and carrying out investigations
Common Core Mathematics Standards
7.RP.A / 6.NS.B / 6.EE.C / 7.EE.B / 8.EE.B / 8.F.B / 6.SP.A
Common Core English Language Arts
SL 6.1 / 6.2 / 7.1 / 7.4 / 8.1
RST 6-8.3 / 6-8.4 / 6-8.7
WHST 6-8.1 / 6-8.7 / 6-8.8 / 6-8.9
Student Material
Share with:
 Google Classroom
Google Classroom



